Работа представляет собой исследование и моделирование методов задания напряжения при помощи устройства плавного пуска, позволяющих снизить пусковой ток асинхронного двигателя и сравнение этих режимов пуска с прямым пуском асинхронного двигателя.
Ключевые слова: расчет, асинхронный двигатель, устройство плавного пуска, MATLAB Simulink.
При пуске асинхронного двигателя на холостом ходу в активном сопротивлении его роторной цепи выделяется тепловая энергия, равная кинетической энергии приводимых во вращение маховых масс, а при пуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в цепи статора обычно несколько больше, чем в роторной. При частых пусках, а также при весьма тяжелых условиях пуска, когда маховые массы приводимых в движение механизмов велики, возникает опасность перегрева обмоток двигателя. Число пусков асинхронного двигателя в час, допустимое по условиям его нагрева, тем больше, чем меньше номинальная мощность двигателя и чем меньше соединенные с его валом маховые массы. [1]
При подаче полного напряжения на статор асинхронной машины имеют место два неблагоприятных фактора, а именно:
– большая кратность начального пускового тока, которая достигает значений равных 4–7 номинальным токам;
– колебательный затухающий характер пускового момента.
Большой начальный пусковой ток вызывает значительные просадки напряжения на питающих шинах подстанции (при соизмеримой мощности трансформатора и двигателя), что нарушает работу, как других потребителей, так и самого двигателя (затягивание пуска). Большой пусковой ток вызывает также значительные термические перегрузки обмотки, следствием чего может быть ускоренное старение изоляции, ее повреждение и, как результат, короткое замыкание.
Применение устройств плавного пуска позволяет уменьшить пусковые токи, снизить вероятность перегрева двигателя, повысить срок службы двигателя, устранить рывки в механической части привода в момент пуска и остановки двигателей.
Среднее по функциональности устройство плавного пуска (УПП) позволяет решать следующие задачи:
– Ограничить пусковой ток (в основных случаях на уровне 3–4,5Iном) и просадки сетевого напряжения питания;
– Оптимизировать пусковой и тормозной моменты для безударных разгонов и остановок приводимых механизмов, продлить срок использования подшипников, зубьев колёс редукторов, ремней и других деталей машин;
– Аварийно защитить питающую сеть от токовых перегрузок, заклинивания вала.
Во всех современных УПП используется два основных способа задачи питающего напряжения. Первый из них Step (шаговый, пьедестальный). График напряжения изображен на рисунке 1.
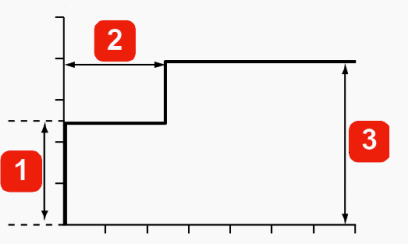
Рис. 1. Шаговая подача напряжения
Двигатель запускается при выбранном пониженном напряжении 1, затем в течение промежутка времени 2 двигатель достигает установившегося режима работы и затем подается полное питающее напряжение 3.
Второй способ Ramp (рампа, наклон), рисунок 2, позволяет плавно изменять напряжение от изначально заданного 1, с заданной интенсивностью 2 во время разгона до полного напряжения 3.
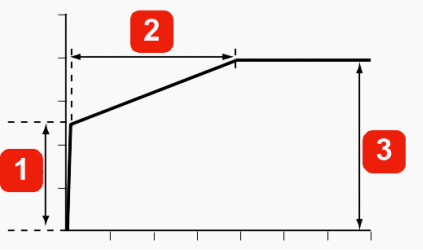
Рис. 2. Рамповая подача напряжения
Схема моделирования в MATLAB представлена на рисунке ниже.
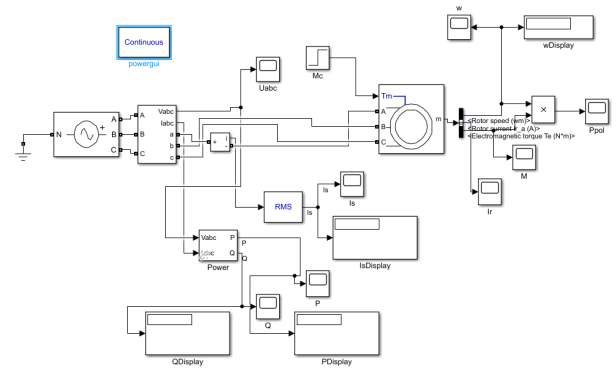
Рис. 3. Схема моделирования в MATLAB
Каталожные параметры исследуемого двигателя, питающегося от сети напряжением Uлн=10000 Вольт и частотой f1=50 Герц приведены в таблице ниже:
Таблица 1
Паспортные данные асинхронного двигателя Siemens 1RA4 452–4HE80
|
|
|
|
|
|
|
|
|
|
|
1120 |
1485 |
95.5 |
0.9 |
75 |
5.5 |
0.7 |
2.2 |
23 |
Все расчеты и моделирование производится в абсолютных единицах. Результаты расчета описаны выражениями 1–14 [2].
Номинальная скорость АД:
![]() (1)
(1)
Номинальный момент АД:
 (2)
(2)
Критический момент АД:
![]() (3)
(3)
Пусковой момент АД:![]()
![]() (4)
(4)
Критическое и номинальное скольжение АД:
 (5)
(5)
![]() (6)
(6)
Механические потери:
 (7)
(7)
Активное сопротивление статора:
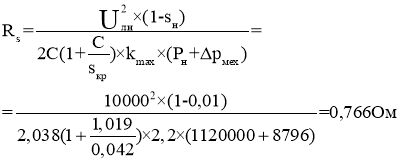 (8)
(8)
Активное сопротивление ротора:
 (9)
(9)
Индуктивность статора и ротора:
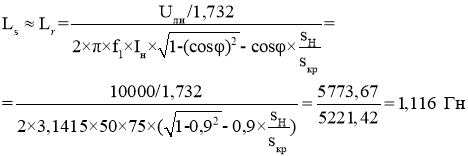 (10)
(10)
Индуктивность рассеяния статора и ротора:
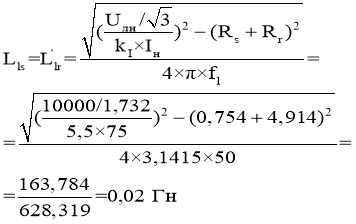 (11)
(11)
Взаимоиндукция:
![]() (12)
(12)
Коэффициент приведения:
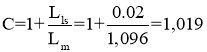 (13)
(13)
Коэффициент вязкого трения:
 (14)
(14)
Произведём моделирование прямого пуска двигателя. График тока статора на рисунке ниже.
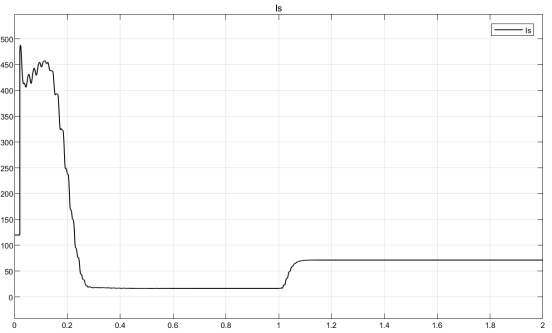
Рис. 4. График тока статора от времени при прямом пуске
При моделировании прямого пуска значение пускового тока практически достигает 500 Ампер. Теперь произведем моделирование режимов УПП Ramp и Step. Воспользуемся для этого блоком Three-Phase Programmable Voltage Source, позволяющим подавать напряжение шаговым и рамповым методами. Параметры блока для шагового метода приведены на рисунке ниже.
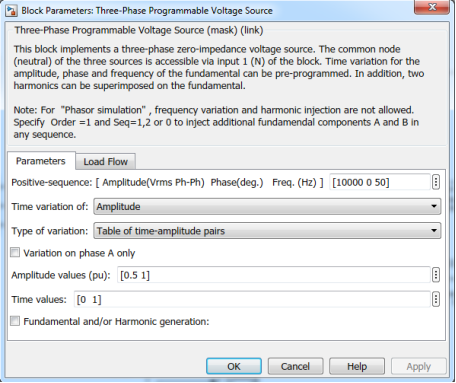
Рис. 5. Параметры блока Three-Phase Programmable Voltage Source при шаговой подаче напряжения
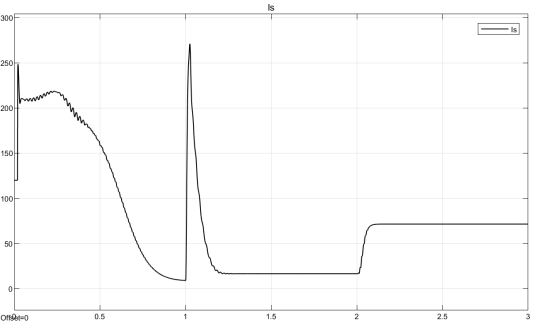
Рис. 5. График тока статора при шаговой подачи напряжения
Максимальное значение тока при стартовом напряжении 5000 Вольт равняется 250 Ампер, однако при таком способе увеличивается длительность пуска, а следовательно, и длительность воздействия тока сверх номинального по сравнению с прямым пуском. Теперь произведем моделирование режима Ramp
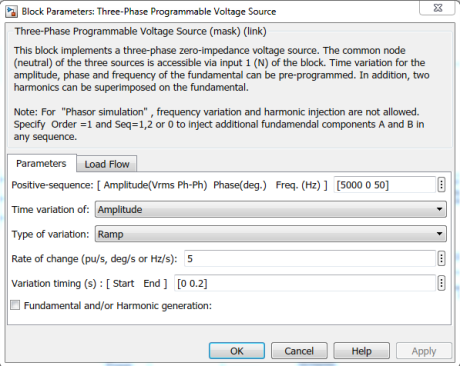
Рис. 7. Параметры блока Three-Phase Programmable Voltage Source
Начальное напряжение задано 5000 Вольт, время достижения полного значения напряжения 10000 Вольт равно 0.2 секунды. Результаты моделирования на графике ниже.
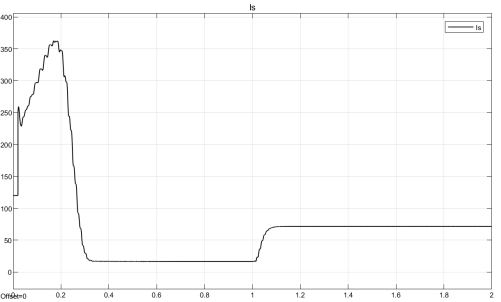
Рис. 5. График тока статора от времени при прямом пуске
Максимальное значения тока равно 360 Амперам. Рамповый метод позволяет уменьшить значение пускового тока при это сохранив длительность пуска неизменной.
Литература:
- Вольдек А. И. Электрические машины. Учебник для студентов высших технических учебных заведений. Изд 2-е, перераб. и доп. Л, «Энергия», 1974–840 с.
- Дементьев Ю. Н. Компьютерное моделирование электромеханических систем постоянного и переменного тока в среде MATLAB Simulink: учебное пособие / Ю. Н. Дементьев, В. Б. Терехин, И. Г. Однокопылов, В. М. Рулевский; Томский политехнический университет. — Томск: Изд-во Томского политехнического университета, 2018. — 497 с

