Рассматривается алгоритм синтеза параметров управляющего устройства асинхронного электропривода с системой преобразователь частоты — асинхронный двигатель на ЭВМ.
Ключевые слова: асинхронный электропривод, преобразователь частоты, среда MATLAB, управляющее устройство, энергосберегающий электропривод, система управления
An algorithm of synthesis of parameters of the control device of asynchronous electric drive with frequency Converter — the asynchronous engine computer
Key words: Asynchronous electric drive, frequency Converter, MATLAB, control device, energy-saving electric drive, control system.
Пуск и торможение асинхронного электропривода переменного тока является одним из основных режимов работы асинхронного электропривода, в особенности для осуществления непрерывного технологического процесса многих производственных машин и установок. Плавный пуск и торможение асинхронного электропривода — одно из необходимых требований технологического процесса производственных машин [1,2,3]. При проектировании управляющего устройства возникает задача выбора его параметров, обеспечивающее плавный пуск движением электроприводом с системой преобразователь частоты — асинхронный двигатель (ПЧ — АД). Структурная схема двухдвигательного асинхронного электропривода с системой ПЧ — АД в среде MATLAB представлена на рисунке 1.
Как видно из рисунка 1, структурная схема состоит из двух идентичных однодвигательных асинхронных электроприводов, напряжения с датчиков скорости каждого двигателя суммируются (![]()
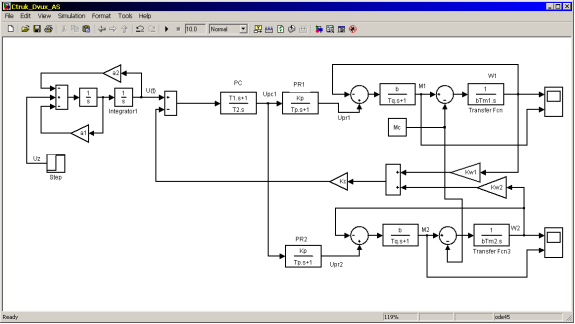
Рис. 1. Структурная схема двухдвигательного асинхронного электропривода с системой ПЧ — АД
В свою очередь сигнал с суммирующего звена подается вход звена с коэффициентом связи ![]() , далее сигнал подается на вход суммирующего звена системы, где сравнивается с сигналом управления
, далее сигнал подается на вход суммирующего звена системы, где сравнивается с сигналом управления ![]() Управляющее устройство, на структурной схеме, представлено двумя интегрирующими звеньями с коэффициентами обратных связей
Управляющее устройство, на структурной схеме, представлено двумя интегрирующими звеньями с коэффициентами обратных связей ![]() и
и ![]() Структурная схема двухдвигательного асинхронного электропривода cоставлена на основе линеаризованной системы однодвигательного асинхронного электропривода [3]. Математическая модель управляющего устройства описывается следующими дифференциальными уравнениями:
Структурная схема двухдвигательного асинхронного электропривода cоставлена на основе линеаризованной системы однодвигательного асинхронного электропривода [3]. Математическая модель управляющего устройства описывается следующими дифференциальными уравнениями:
![]()
![]()
![]() , (1)
, (1)
где ![]() — задающее воздействие на входе устройства управления,
— задающее воздействие на входе устройства управления, ![]() — управление системы. Численные значения параметров асинхронных двигателей и преобразователей частоты известны. Поэтому определению подлежат параметры управляющего устройства
— управление системы. Численные значения параметров асинхронных двигателей и преобразователей частоты известны. Поэтому определению подлежат параметры управляющего устройства ![]() и
и ![]() , коэффициент связи
, коэффициент связи ![]() и постоянные времени регулятора скорости (РС)
и постоянные времени регулятора скорости (РС) ![]() . Указанные параметры должны быть рассчитаны таким образом, чтобы переходные процессы скоростей асинхронных двигателей с системой ПЧ — АД получались без перерегулирования и без колебаний, т. е. близкие к оптимальному процессу. Для решения задачи синтеза параметров регулятора скорости, коэффициента связи и параметров управляющего устройства, динамику замкнутого частотно — регулируемого двухдвигательного асинхронного электропривода представим следующей системой дифференциальных уравнений при
. Указанные параметры должны быть рассчитаны таким образом, чтобы переходные процессы скоростей асинхронных двигателей с системой ПЧ — АД получались без перерегулирования и без колебаний, т. е. близкие к оптимальному процессу. Для решения задачи синтеза параметров регулятора скорости, коэффициента связи и параметров управляющего устройства, динамику замкнутого частотно — регулируемого двухдвигательного асинхронного электропривода представим следующей системой дифференциальных уравнений при ![]() :
:
![]()
![]()
![]()
![]() (2)
(2)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
где ![]() приращение скорости вращения двигателя;
приращение скорости вращения двигателя;
![]() приращение угловой скорости электромагнитного поля;
приращение угловой скорости электромагнитного поля;
![]() приращение напряжения на выходе регулятора скорости;
приращение напряжения на выходе регулятора скорости;
![]() передаточный коэффициент преобразователя частоты (ПЧ);
передаточный коэффициент преобразователя частоты (ПЧ);
![]() постоянная времени цепи управления ПЧ;
постоянная времени цепи управления ПЧ;
![]() эквивалентная электромагнитная постоянная времени цепи
эквивалентная электромагнитная постоянная времени цепи
статора и ротора АД;
![]() электромеханическая постоянная времени двигателя;
электромеханическая постоянная времени двигателя;
![]() постоянные времени регулятора скорости;
постоянные времени регулятора скорости;
С целью удобства решения поставленной задачи систему уравнений (2) запишем в следующем виде:
![]()
![]()
![]()
![]() (3)
(3)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
здесь ![]()
![]()
![]()
Структурная схема алгоритма [4] cинтеза параметров системы (3) приведена на рисунке 2.
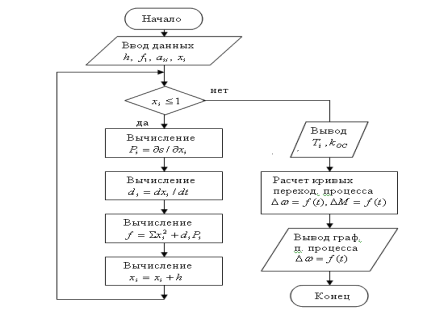
Рис. 2. Алгоритм синтеза параметров
Процедура вычислений заключается в следующем:
– Вводятся исходные данные — величина шага ![]() по каждой переменной
по каждой переменной ![]() , вводится начальное приближение функции многих переменных
, вводится начальное приближение функции многих переменных ![]() , задаются случайные значения (с использованием датчика случайных величин) коэффициенты
, задаются случайные значения (с использованием датчика случайных величин) коэффициенты ![]() квадратичной формы функции
квадратичной формы функции ![]() ;
;
– Проверяется условие выполнения неравенства численного значения переменной ![]() ;
;
– Вычисляются частные производные квадратичной функции ![]() по каждой переменной
по каждой переменной ![]() ;
;
– Вычисляются численные значения правой части системы дифференциальных уравнений (3) ![]() ;
;
– Вычисляется минимум функции многих переменных ![]() методом сканирования, представляющая собой сумму функции Ляпунова
методом сканирования, представляющая собой сумму функции Ляпунова ![]() и её полной производной
и её полной производной ![]() ;
;
– Вычисляется новые численные значения переменных ![]() с передачей управления счета на проверку условия не превышения заданной верхней границы переменных
с передачей управления счета на проверку условия не превышения заданной верхней границы переменных ![]() ;
;
В случае невыполнения условия выводятся численные значения постоянных времени регулятора скорости ![]() , коэффициента связи
, коэффициента связи ![]() и коэффициентов устройства управления
и коэффициентов устройства управления ![]() .
.
При полученных численных значений выше указанных параметров системы осуществляется расчет кривых переходного процесса скорости по дифференциальным уравнениям методом Рунге — Кутта;
Для визуального наблюдения за качеством переходных процессов графики переходных процессов выводятся на экран дисплея.
Результаты расчетов, полученные при решении задачи синтеза параметров управляющего устройства и системы управления, приведены в таблице 1.
Таблица 1
|
|
|
|
|
|
|
5,93 |
0,11 |
0,54 |
5,6 |
5,4 |
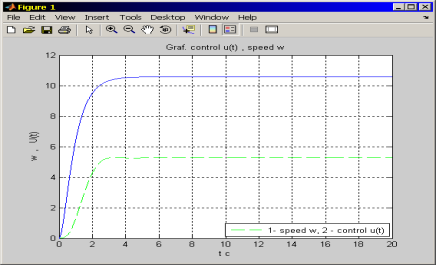
Рис. 3. Кривые переходных процессов управления U(t) и скорости асинхронного двигателя w
Выводы
- Разработана система управления двухдвигательным асинхронным электроприводом с системой «преобразователь частоты — асинхронный двигатель».
- Разработана методика расчета параметров управляющего устройства и системы управления двухдвигательным асинхронным электроприводом.
Литература:
- Браславский И. Я., Ишматов З. Ш., Поляков В. Н. Энергосберегающий асинхронный электропривод. — М.: Издательский центр «Академия», 2004, с. 134–136.
- Розанов Ю. К., Соколова Е. М. Электронные устройства электромеханических систем. — М.: Издательский центр «Академия», 2004, с. 179–180.
- Терехов В. Н., Осипов О. И. Системы управления электроприводов. — М.: Издательский центр «Академия», 2008, с. 190–198.
- Сагитов П. И., Тергемес К. Т., Шадхин Ю. И. Параметрический синтез системы управления многодвигательного асинхронного электропривода //Вестник Алматинского университета энергетики и связи. — 2011. — № 2(13). с. 63–66.

