В статье приводятся результаты моделирования в среде MATLAB системы векторного управления (СВУ) асинхронным электродвигателем с короткозамкнутым ротором (АДКР) в режиме регулирования скорости.
Ключевые слова: векторное управление, векторное управление с ориентацией по полю ротора, асинхронный двигатель, Field Oriented Control, MATLAB.
The article presents the results of modeling in the MATLAB environment of a vector control system (VMS) for an asynchronous electric motor with a short-circuited rotor (ADCR) in the speed control mode.
Keywords: vector control, vector control with rotor field orientation, asynchronous motor, Field Oriented Control, MATLAB.
Векторное управление электроприводом с АДКР применяется при повышенных требованиях к динамическим и статическим характеристикам регулирования выходных переменных привода, а также в случаях, когда регулируемой переменной является момент на валу.
Векторное управление нашло широкое применение в следующих направлениях промышленности:
— в электроприводах главного движения и подач металлорежущих станков;
— в намоточных механизмах, требующих регулирование натяжения материала;
— в сервоприводах, выполняющих задачу быстродействующего регулирования положения;
— в тяговом электроприводе;
— в приводе электродов дуговых сталеплавильных печей и множестве других механизмов.
В настоящей работе исследуется модель СВУ, построенная на базе уравнений динамики АДКР, записанных относительно тока статора и потокосцепления ротора в синхронной ортогональной системе координат ( x,y ), ориентированной по вектору потокосцепления ротора. Как указано в [2], данный способ привязки системы координат позволяет получить наиболее простую модель ротора АДКР. В качестве способа ориентации используется косвенный метод, согласно которому модель СВУ не содержит узлов непосредственного измерения потокосцепления ротора, а использует вместо этого математическую модель потока электродвигателя.
В качестве основного режима работы предполагается управление скоростью АДКР, при этом сигнал обратной связи по скорости заводится с датчика скорости, установленного на валу электродвигателя.
Исследуемая модель представлена на рис. 1. Как можно видеть на рис. 1 в системе реализовано раздельное управление потокосцеплением и электромагнитным моментом электродвигателя в каналах регулирования реактивной ( I x ) и активной ( I y ) составляющих тока статора. Для того, чтобы исключить из модели индуктивность намагничивания L m которая нелинейно зависит от тока, удобнее использовать понятие тока намагничивания ротора I u = Ψ s /L m . Поэтому далее в работе используется именно эта величина.
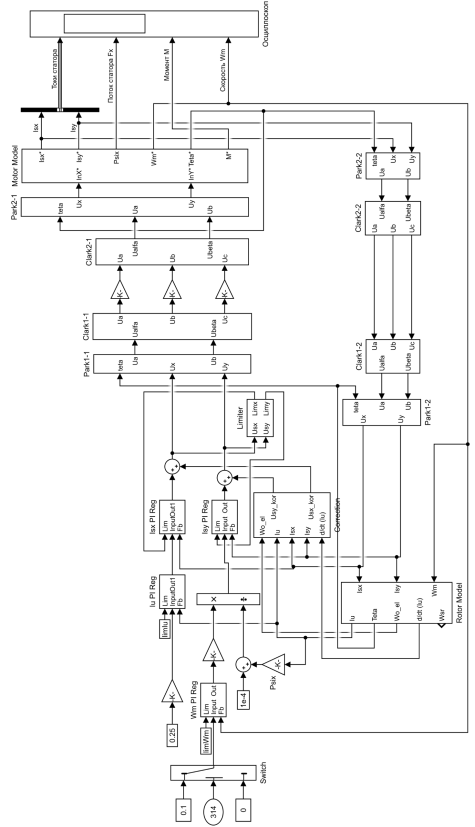
Рис. 1. Модель электропривода, включающая в себя исследуемую модель СВУ и построенную во вращающейся системе координат x-y модель АДКР (Motor Model)
Параметры регуляторов контуров рассчитаны на основе принципов подчиненного регулирования с учетом дискретного характера процессов, с компенсацией влияния перекрестных связей и структурной линеаризацией контуров. В системе присутствуют внутренние токовые контуры с регуляторами « Isx PI Reg » и « Isy PI Reg » и, по отношению к ним, внешние: контур тока намагничивания с регулятором « Iu PI Reg » и контур скорости с регулятором « Wm PI Reg ». Входными сигналами токовых контуров являются выходы соответствующих внешних контуров, а в качестве обратной связи используются сигналы на выходе преобразователей координат, которые преобразуют измеренные трехфазные значения фазных токов I s a , b , c в естественных координатах в сигналы постоянного тока I s x , y вращающейся координатной сетки x-y .
Регулятор « Iu PI Reg » замкнут по модулю вектора тока намагничивания, вычисляющемся в блоке роторной цепи «Rotor Model», а регулятор « Wm PI Reg » — по сигналу скорости с датчика скорости. Входным сигналом « Iu PI Reg » выступает константа, а задание по скорости может изменяться во времени.
На выходе токовых регуляторов формируется задание вектора напряжения статора. Вычислитель напряжения, используя информацию о значении постоянного напряжения, которое в модели принято за U dc =100 , определяет модуль задания вектора напряжения статора и ограничивает его максимальное значение.
Кроме модуля тока намагничивания I u в блоке «Rotor Model» рассчитывается текущее значение угла поворота вращающейся системы координат x-y относительно связанной со статором неподвижной системы координат a-b-c , а также значение электромагнитного момента двигателя M .
Преобразователи координат Park1–1 и Clark1–1 трансформирует вектор задания напряжения статора из вращающейся системы координат в естественную ( xy→АВС ).
Преобразователи координат Park1–2 и Clark1–2 ( АВС→xy ) выполняют обратное преобразования фазных токов статора из естественной трехфазной системы координат (А,В,С) в синхронную ( x,y ).
Блок компенсации перекрестных связей « Correction » формирует сигналы, компенсирующие влияние перекрестных связей на процессы в контурах регулирования составляющих вектора тока статора.
Выполнено моделирование процесса разгона электродвигателя. При этом все параметры, используемые в модели, а также осциллограммы переходных процессов выражены в относительных единицах [3].
На рис. 2 представлены осциллограммы процесса разгона электропривода после подачи на его вход скачка задания скорости величиной ω з = 0,1 о.е. при уставке тока намагничивания I u з = 0,25 о.е. и значении ограничения пускового момента M max =0,7 о.е.
Время моделирования выбрано равным T = 50*2*pi = 314,17, где T b — базовое значение времени в о. е., что соответствует действительному времени 1,0 с. [3]
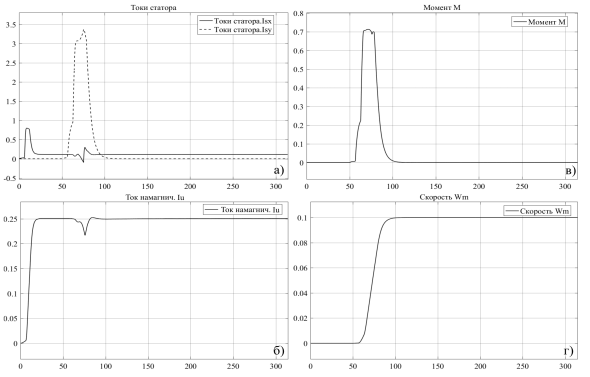
Рис. 2. Результаты моделирования системы векторного управления. Здесь изображены следующие переменные в о.е: а) токи статора Isx и Isy ; б) ток намагничивания Iu ; в) вращающий момент на валу M ; г) механическая скорость ротора Wм
Осциллограммы на рис. 2 (а,б) иллюстрируют корректную работу контура тока намагничивания Iu на всем временном интервале моделирования. В начальный момент времени T=0 о.е. регулятор « Iu PI Reg» выводит реактивный ток Ix на уровень уставки I u з = 0,25. Затем в момент T=50 о.е. на вход регулятора скорости подается уставка ω з = 0,1 о.е., при этом привод начинает разгоняться, а благодаря наличию в СВУ блока компенсации контур I u справляется с задачей поддержания тока I sx на уровне задания. Это говорит о корректности расчетов параметров контуров I sx и Iu .
Осциллограмма на рис. 2 (в) иллюстрируют работу блока ограничения момента, благодаря которому разгон происходит каждый раз со значением M=0,7 о.е. Данную величину можно изменить в поле «Saturation» настроек блока регулятора « Wm PI Reg ».
На осциллограмме на рис. 2 (г) видно, что регулятор скорости полностью отрабатывает задание, что говорит и верно рассчитанных параметрах контуров I sy и W m .
Таким образом, исследованная модель системы векторного управления позволяет осуществить независимое управление потокосцеплением Ψ s и электромагнитным моментом Μ асинхронного электродвигателя путем регулирования реактивной и активной составляющих тока статора I sx и I sy .
Результаты моделирования показали, что каждый из контуров управления адекватно отрабатывает поданную уставку с заданной скоростью реакции и точностью. Можно заключить, что исследование показало полную работоспособность модели системы векторного управления асинхронным электроприводом.
Литература:
- Чуев П. В. Разработка систем векторного управления асинхронными приводами на базе специализированных сигнальных микроконтроллеров: Диссертация на соискание учёной степени кандидата технических наук. Московский энергетический институт, Москва, 2002. − 254 с.
- Виноградов А. Б. Векторное управление электроприводами переменного тока // ГОУВПО «Ивановский государственный энергетический университет имени В. И. Ленина», Иваново, 2008. — 297 с.
- Кравчик А. Э., Шлаф Э. Э., Афонин В. И. Асинхронные двигатели серии 4А: Справочник / А90 — М.: Энергоатомиздат, 1982. — 504 с., ил.
- Терехин В. Б. Моделирование автоматизированного электропривода в simulink // Учебное пособие, — Издательство Томского университета, Томск, 2013. — 325 с.
- Мищенко В. А., Мищенко Н. И., Мищенко А. В. Способ векторной ориентации тока электромеханического преобразователя энергии и устройство векторной ориентации («векторинг») для осуществления способа // Патент на изобретение RU 2141719 C1, 20.11.1999.
- Виноградов А. Б. Развитие теории и практическая реализация векторных электроприводов переменного тока с микропроцессорным управлением // Диссертация на соискание учёной степени доктора технических наук. Ивановский государственный университет, Иваново, 2009.

