Моделирование асинхронного двигателя с переменными ψm – is в Matlab-Script в системе относительных единиц
Емельянов Александр Александрович, старший преподаватель;
Бесклеткин Виктор Викторович, старший преподаватель;
Гусев Владимир Михайлович, студент магистратуры;
Камеристов Кирилл Владимирович, студент;
Артемьев Алексей Валентинович, студент;
Насыбуллин Рустам Наилевич, студент;
Велькер Александр Витальевич, студент;
Шерстобитов Андрей Владимирович, студент;
Федотов Владислав Викторович, студент
Российский государственный профессионально-педагогический университет (г. Екатеринбург)
Пестеров Дмитрий Ильич, студент магистратуры
Уральский государственный университет путей сообщения (г. Екатеринбург)
В данной работе показано поэтапное преобразование математической модели асинхронного двигателя с переменными ψm – is из Simulink в Matlab-Script.
В работе [1] была получена структурная схема для определения статорного тока isx в Simulink (рис. 1) по следующему уравнению:
|
|
(1) |

где ![]() - электрическая скорость вращения ротора;
- электрическая скорость вращения ротора;
![]() - механическая угловая скорость на валу двигателя.
- механическая угловая скорость на валу двигателя.
Преобразуем уравнение (1) для программирования в Matlab-Script:
![]()
Обозначим ![]() , тогда:
, тогда:

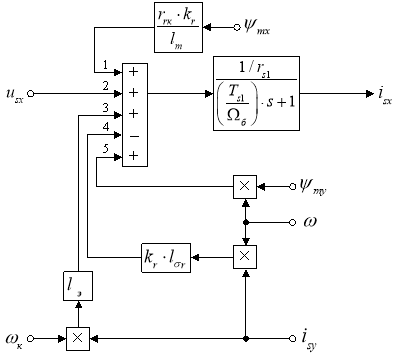
Рис. 1. Структурная схема для определения тока isx в Simulink
Переходим к оригиналу ![]() :
:

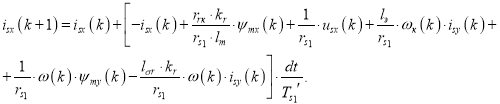
Переходим к конечным разностям (метод Эйлера):
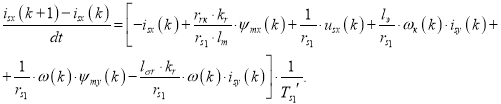
Отсюда ток isx в Matlab-Script определится следующим образом:
Уравнение для определения тока isy в Simulink, полученное в работе [1], имеет следующий вид:
|
|
(2) |

Структурная схема реализации уравнения (2) приведена на рис. 2.
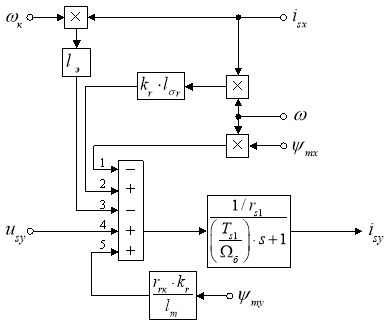
Рис. 2. Структурная схема для определения тока isy в Simulink
Аналогично преобразуем выражение тока isy в форму, удобную для программирования в Matlab-Script:


Переходим к оригиналу:

Переходим к конечным разностям:
Ток isy в Matlab-Script определится следующим образом:
В работе [1] была получена структурная схема для определения потокосцепления ψmx в Simulink (рис. 3) по следующему уравнению:
|
|
(3) |

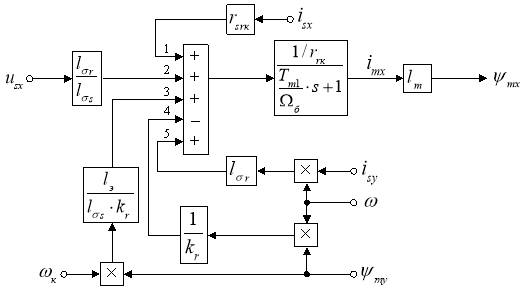
Рис. 3. Структурная схема для определения потокосцепления ψmx в Simulink
Преобразуем уравнение (3) для программирования в Matlab-Script:
![]()
Обозначим ![]() , тогда:
, тогда:

Переходим к оригиналу:

Переходим к конечным разностям:

Отсюда потокосцепление ψmx в Matlab-Script определится следующим образом:

Уравнение для определения тока ψmy в Simulink, полученное в работе [1], имеет следующий вид:
|
|
(4) |

Структурная схема реализации уравнения (4) приведена на рис. 4.
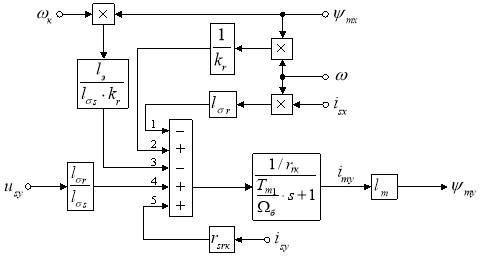
Рис. 4. Структурная схема для определения потокосцепления ψmy в Simulink
Преобразуем выражение потокосцепления ψmy в форму, удобную для программирования в Matlab-Script:





На рис. 5 представлена структурная схема для реализации уравнения электромагнитного момента в Simulink:
![]()
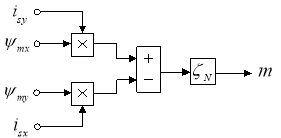
Рис. 5. Математическая модель определения электромагнитного момента m в Simulink
Уравнение электромагнитного момента для реализации в Matlab-Script:
![]()
Механическая угловая скорость вращения вала двигателя в Simulink (рис. 6):
![]()
![]()
Рис. 6. Математическая модель определения механической угловой скорости вращения вала двигателя в Simulink
Отсюда механическая угловая скорость вращения вала двигателя в Matlab-Script:
![]()
![]()

![]()
Электрическая скорость вращения ротора в Simulink (рис. 7):
![]()
![]()
Рис. 7. Математическая модель определения электрической скорости вращения ротора в Simulink
Электрическая скорость вращения ротора в Matlab-Script:
![]()
Реализация математической модели асинхронного двигателя с короткозамкнутым ротором с переменными ψm – is в Matlab-Script в системе относительных единиц приведена в листинге 1.
Листинг 1
% Номинальные данные
PN=320000; UsN=380; IsN=324; fN=50; Omega0N=104.7;
OmegaN=102.83; nN=0.944; cos_phiN=0.92; zp=3;
% Параметры Т-образной схемы замещения при номинальной частоте
Rs=0.0178; Xs=0.118; Rr=0.0194; Xr=0.123; Xm=4.552; J=28;
% Базисные величины системы относительных единиц
Ub=sqrt(2)*UsN;
Ib=sqrt(2)*IsN;
OmegasN=2*pi*fN;
Omegab=OmegasN;
Omegarb=Omegab/zp;
Zb=Ub/Ib;
kd=1.0084;
Mb=kd*PN/OmegaN;
Pb=Mb*Omegarb;
% Расчет коэффициентов
rs=Rs/Zb;
lbs=Xs/Zb;
lbr=Xr/Zb;
lm=Xm/Zb;
Tj=J*Omegarb/Mb;
betaN=(Omega0N-OmegaN)/Omega0N;
SsN=3*UsN*IsN;
ZetaN=SsN/Pb;
kr=lm/(lm+lbr);
roN=0.9962;
rrk=roN*betaN;
le=lbs+kr*lbr;
rs1=kr*rrk+rs;
rsrk=rrk-rs*lbr/lbs;
Ts1=le/rs1;
Ts11=Ts1/Omegab;
Tm1=lm*le/(rrk*kr*lbs);
Tm11=Tm1/Omegab;
% Расчет модели асинхронного двигателя
K=input('Длительность цикла k=');
for k=1:K
wk(k)=1; dt=0.000001;
usx(k)=0; usy(k)=1;
isx(1)=0; isy(1)=0; psimx(1)=0; psimy(1)=0;
wm(1)=0; w(1)=0; mc=0;
isx(k+1)=isx(k)+(-isx(k)+(rrk*kr/(rs1*lm))*psimx(k)+(1/rs1)*usx(k)+ (le/rs1)*wk(k)*isy(k)+(1/rs1)*w(k)*psimy(k)-(lbr*kr/rs1)*w(k)*isy(k))* dt/Ts11;
isy(k+1)=isy(k)+(-isy(k)+(rrk*kr/(rs1*lm))*psimy(k)+(1/rs1)*usy(k)-(le/rs1)*wk(k)*isx(k)-(1/rs1)*w(k)*psimx(k)+(lbr*kr/rs1)*w(k)*isx(k))* dt/Ts11;
psimx(k+1)=psimx(k)+(-psimx(k)+(lm*rsrk/rrk)*isx(k)+(lm*lbr/(rrk* lbs))*usx(k)+(lm*le/(rrk*lbs*kr))*wk(k)*psimy(k)-(lm/(rrk*kr))*w(k)*psimy(k)+ (lm*lbr/rrk)*w(k)*isy(k))*dt/Tm11;
psimy(k+1)=psimy(k)+(-psimy(k)+(lm*rsrk/rrk)*isy(k)+(lm*lbr/(rrk* lbs))*usy(k)-(lm*le/(rrk*lbs*kr))*wk(k)*psimx(k)+(lm/(rrk*kr))*w(k)*psimx(k)-(lm*lbr/rrk)*w(k)*isx(k))*dt/Tm11;
m(k+1)=ZetaN*(psimx(k+1)*isy(k+1)-psimy(k+1)*isx(k+1));
wm(k+1)=wm(k)+(m(k+1)-mc)*dt/Tj;
w(k+1)=wm(k+1)*zp;
% mass
mass_t(k)=k*dt;
mass_m(k)=m(k+1);
mass_w(k)=w(k+1);
end;
% Построение графиков
figure(1);
plot(mass_t,mass_w,'b');
grid on;
figure(2);
plot(mass_t,mass_m,'b');
grid on;
Результаты моделирования асинхронного двигателя в Matlab-Script даны на рис. 8.
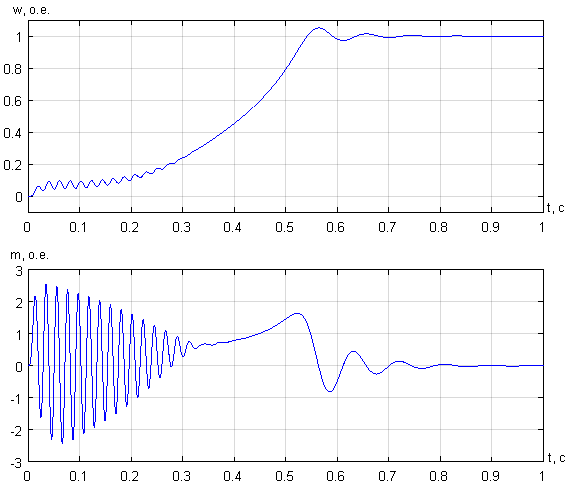
Рис. 8. Графики скорости и электромагнитного момента
Литература:
- Емельянов А.А., Бесклеткин В.В., Корнильцев А.Г., Факеев Д.Г., Маклыгин К.А., Логинов А.В., Коновалов И.Д., Антоненко И.А., Пестеров Д.И. Моделирование САР скорости асинхронного двигателя с переменными ψm – is с контуром потока в системе относительных единиц // Молодой ученый. — 2018. — №40. — С. 6-25.
- Шрейнер Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р.Т. Шрейнер, А.В. Костылев, В.К. Кривовяз, С.И. Шилин. Под ред. проф. д.т.н. Р.Т. Шрейнера. - Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. - 361 с.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000. - 654 с.

