Моделирование асинхронного двигателя с переменными Ψm – IS на выходе интегрирующих звеньев в системе абсолютных единиц в Simulink-Script
Емельянов Александр Александрович, доцент;
Бесклеткин Виктор Викторович, ассистент;
Пестеров Дмитрий Ильич, студент;
Одинцов Василий Олегович, студент;
Соснин Александр Сергеевич, студент;
Антоненко Илья Александрович, студент;
Коновалов Илья Дмитриевич, студент;
Бабкин Виталий Андреевич, студент
Российский государственный профессионально-педагогический университет (г. Екатеринбург)
Данная работа является продолжением статьи [1], в которой проекции векторов ![]() и
и ![]() были получены на выходе апериодических звеньев. В этой статье проекции векторов
были получены на выходе апериодических звеньев. В этой статье проекции векторов ![]() и
и ![]() выведены на основе интегрирующих звеньев.
выведены на основе интегрирующих звеньев.
В работе [1] было получено уравнение (9):

Перенесем в левую часть ![]() :
:

Обозначим ![]() и
и ![]() .
.
Умножим обе части полученного уравнения на kr:

Тогда ток ISx определится в следующем виде:

Структурная схема проекции статорного тока ISx на ось (+1) приведена на рис. 1.
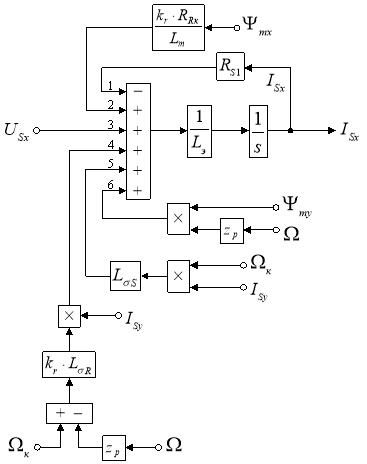
Рис. 1. Структурная схема проекции статорного тока ISx на ось (+1)
Аналогично, приведем уравнение (11) из работы [1].

Перенесем в левую часть ![]() и умножим обе части на kr:
и умножим обе части на kr:

Отсюда определим ток ISy:

Структурная схема проекции статорного тока ISy на ось (+j) приведена на рис. 2.
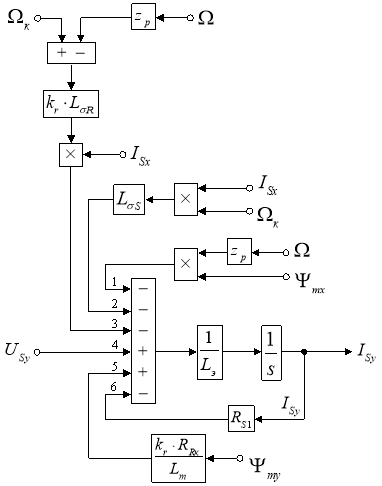
Рис. 2. Структурная схема для определения проекции статорного тока ISy на ось (+j)
Определим потокосцепление Ψmx по оси (+1) из уравнения (13) работы [1]:

Перенесем в левую часть ![]() :
:


Обозначим:
![]()
![]()

Тогда потокосцепление Ψmx определится следующим образом:
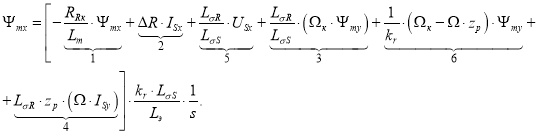
Структурная схема для определения потокосцепления Ψmx приведена на рис. 3.
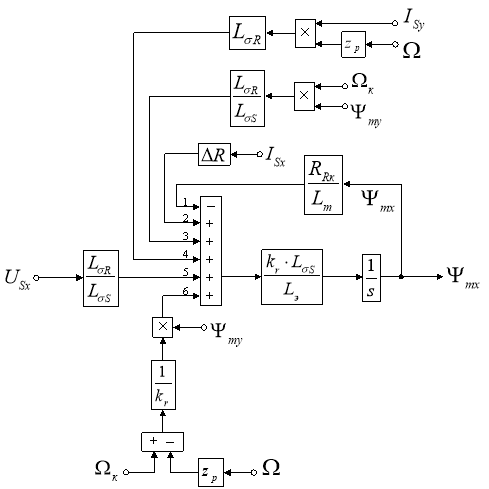
Рис. 3. Структурная схема для определения потокосцепления Ψmx
Определим потокосцепление Ψmy по оси (+j) из уравнения (15) работы [1]:

Перенесем в левую часть ![]() :
:
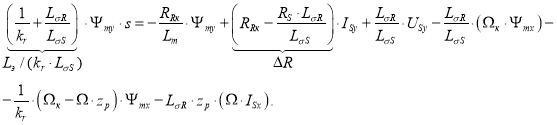
Потокосцепление Ψmy определится следующим образом:
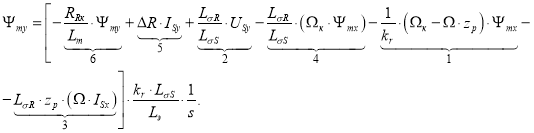
Структурная схема для определения потокосцепления Ψmy приведена на рис. 4.
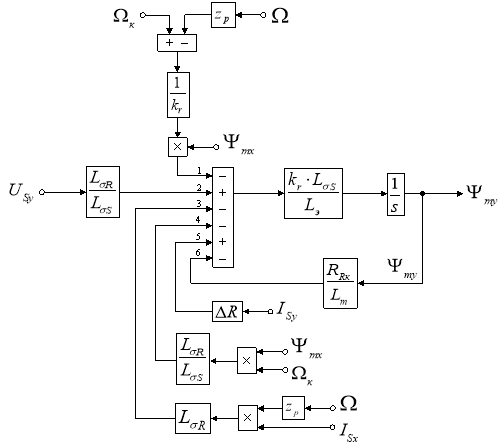
Рис. 4. Структурная схема для определения потокосцепления Ψmy
На рис. 5 представлена структурная схема для реализации уравнения электромагнитного момента:
![]()
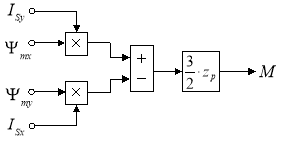
Рис. 5. Математическая модель определения электромагнитного момента M
Из уравнения движения выразим механическую угловую скорость вращения вала двигателя (рис. 6):
![]()
![]()

Рис. 6. Математическая модель уравнения движения
Математическая модель асинхронного двигателя с короткозамкнутым ротором с переменными Ψm – IS на выходе интегрирующих звеньев в системе абсолютных единиц приведена на рис. 7. Параметры асинхронного двигателя рассмотрены в работах [2] и [3].
Расчет параметров производим в Script:
|
PN=320000; UsN=380; IsN=324; fN=50; Omega0N=104.7; OmegaN=102.83; nN=0.944; cos_phiN=0.92; zp=3; Rs=0.0178; Xs=0.118; Rr=0.0194; Xr=0.123; |
Xm=4.552; J=28; Ub=sqrt(2)*UsN; Ib=sqrt(2)*IsN; OmegasN=2*pi*fN; Omegab=OmegasN; Zb=Ub/Ib; Psib=Ub/Omegab; Lb=Psib/Ib; rs=Rs/Zb; lbs=Xs/Zb; rr=Rr/Zb; lbr=Xr/Zb; |
lm=Xm/Zb; Lm=lm*Lb; betaN=(Omega0N-OmegaN)/Omega0N; kr=lm/(lm+lbr); lbe=lbs+lbr+lbs*lbr*lm^(-1); roN=0.9962; rrk=roN*betaN; RRk=rrk*Zb; RS1=Rs+kr*RRk; LbS=lbs*Lb; LbR=lbr*Lb; Le=LbS+kr*LbR; dR=RRk-Rs*LbR/LbS; |
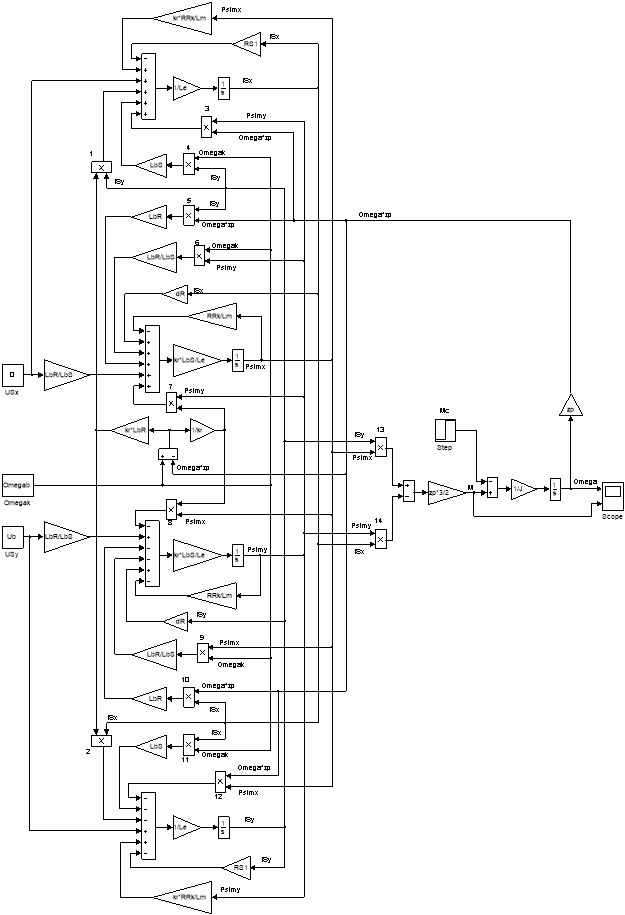
Рис. 7. Математическая модель асинхронного двигателя с переменными Ψm – IS на выходе интегрирующих звеньев в системе абсолютных единиц
Результаты моделирования асинхронного двигателя представлены на рис. 8.
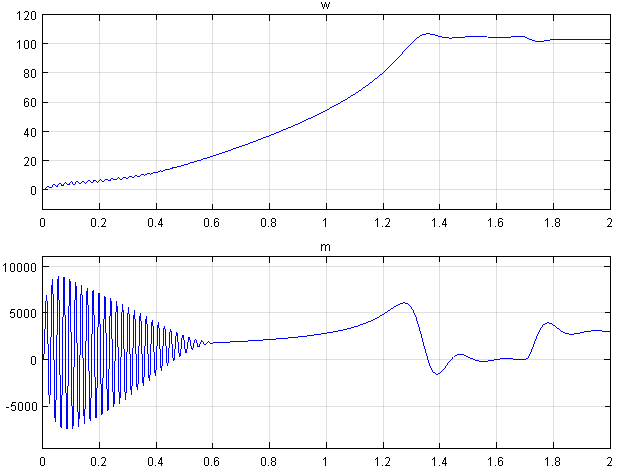
Рис. 8. Графики скорости и момента
Литература:
- Емельянов А.А., Бесклеткин В.В., Пестеров Д.И., Одинцов В.О., Антоненко И.А., Коновалов И.Д., Бабкин В.А. Моделирование асинхронного двигателя с переменными Ψm – IS на выходе апериодических звеньев в системе абсолютных единиц в Simulink-Script // Молодой ученый. - 2017. - №45. – С. 8-19
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000. - 654 с.
- Шрейнер Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р.Т. Шрейнер, А.В. Костылев, В.К. Кривовяз, С.И. Шилин. Под ред. проф. д.т.н. Р.Т. Шрейнера. - Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. - 361 с.

