В статье рассмотрено описание модуля электроники для математической компенсации, сформулирована концепция построения электронного преобразователя с возможностью математической компенсации погрешности. В статье описаны основные функциональные узлы электронного преобразователя.
Ключевые слова: линейное ускорение, блок акселерометров, модуль электроники, микроконтроллер, погрешность.
Современные управляемые подвижные объекты включают в себя систему определения пространственного положения и координат. Для обеспечения необходимых траекторно-скоростных параметров необходимо точное определение характеристик движения. Одной из таких характеристик является линейное ускорение подвижного объекта и его ориентация относительно вектора свободного падения. В данном случае используется трехосный блок акселерометров, так как движение происходит в трехмерной системе координат, и для правильного расчета необходима информация о проекции линейного ускорения на три ортогональные оси — оси чувствительности трехосного блока.
Блок акселерометров представляет собой единый объем, в котором установлены три чувствительных элемента и модуль электроники.
На сегодняшней день, с учетом специфики применения блока, существует возможность разработки нового модуля с отечественным микроконтроллером, позволяющим осуществлять дополнительные математические вычисления. Из теории приборостроения и радиоэлектроники известно, что погрешность можно разделить на случайную и систематическую. Случайная погрешность носит стохастический характер и не поддается прогнозированию. Систематическая погрешность при правильно построенной ее модели позволяет произвести ее алгоритмическую компенсацию.
Целью разработки является создание модуля электроники блока, предназначенного для измерения линейных ускорений объекта по трем ортогональным осям и выдачи информации в виде последовательного кода по интерфейсу RS-232 с последующей математической компенсацией погрешности.
В основу функционирования модуля электроники для блока акселерометров заложена схема измерения линейного ускорения на основе маятниковой инерционной массы чувствительного элемента (ЧЭ), охваченная отрицательной обратной связью для формирования силового компенсирующего воздействия.
В основу функционирования блока электроники заложена схема измерения линейного ускорения на основе маятниковой инерционной массы, охваченная отрицательной обратной связью для формирования силового компенсирующего воздействия. Функциональная схема представлена на рис. 1.
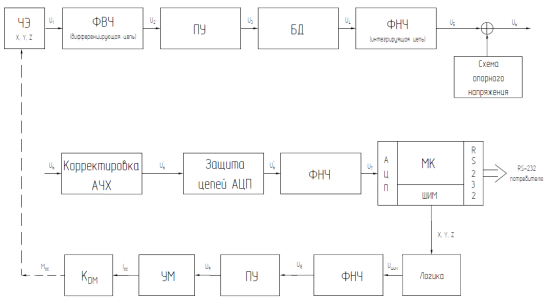
Рис. 1
На рисунке 1 приняты следующие обозначения:
— МК — микроконтроллер;
— ФНЧ — фильтр низких частот;
— ФВЧ — фильтр высоких частот;
— АЦП — аналого-цифровой преобразователь;
— ДМ — датчик момента;
— У — усилитель;
— К1, К2 — электронные ключи;
— ЧЭ — чувствительный элемент;
— БДМ — балансный демодулятор.
В качестве чувствительного элемента выступает подвижная масса, изготовленная из плавленого кварца. Для обеспечения возможности управления подвижной массой и динамической регулировки диапазона измерения и погрешностей сформирован контур управления данной массы на основе отрицательной магнитоэлектрической обратной связи.
Он позволяет за счет тока (или импульсов тока), протекающего в катушках контура обратной связи производить изменение положения подвижной массой. Такая манипуляция позволяет производить управления систематической погрешностью измерения.
Рассмотрим принцип действия системы «чувствительный элемент — модуль». При воздействие линейного ускорения по одной из трех осей чувствительности на подвижную массу начинает действовать сила инерции, равная произведению данной массы на действующее линейное ускорение. С учетом консольной заделки чувствительного элемента возникает инерциальный момент — произведение силы на плечо.
Инерциальный момент, действую на подвижную массу приводит, к ее угловую перемещению. Перемещение детектируется датчиком угла ёмкостного типа. Конструктивно датчик представляет собой две дифференциальных емкости, с одной общей обкладкой. При отклонении массы происходит разбаланс емкостей, который содержит информацию о проекции линейного ускорения на ось чувствительности. Емкостной преобразователь входит в модуль первоначальной обработки информации — демодулятора.
Измерительный каскад конденсаторов запитывается противофазным и фазным аналоговым сигналом в виде меандров и частотой 700 кГц. Данный сигнал формируется за счет внутреннего ШИМа микроконтроллера. Сигнал с неподвижных обкладок дифференциального конденсатора. Математическая разность информационных сигналов проходит высокочастотный фильтр (ФВЧ) с целью минимизации паразитных емкостей. Вторым узлом является балансный демодулятор, который осуществляет суммирование полезных сигналов, что позволяет минимизировать синфазную погрешность. После прохождения аналогового демодулятора происходит его фильтрация нижних частот с выделением постоянного уровня. Затем сигнал поступает на вход операционного масштабного усилителя, который формирует сигнал для входа АЦП.
АЦП интегрирован в микроконтроллер и принимает три аналоговых сигнала с дифференциальных емкостных датчиков по трем осям и сигнал с датчика температуры, который размещен на модуле электроники и представляет собой транзисторный каскад, включенный по диодной схеме. Микроконтроллер обеспечивает оцифровку аналоговых сигналов. Микроконтроллер предназначен для формирования цифрового сигнала и выдачи его внешнему потребителю в соответствии с протоколом обмена по RS-232. Учитывая зависимость нулевого сигнала и крутизны преобразования от температуры и других внешних возмущающих факторов, которая описывается математической функцией, может производится алгоритмическая компенсация погрешности акселерометра.
Главными принципами при конструировании модуля выступают:
— модуль должен быть функционально и конструктивно завершенными;
— количество выводов у модуля должно быть минимальным;
— конструктивная, технологическая, тепловая и электромагнитная совместимость модуля.
Конструкция модуля электроники для блока акселерометров требует размещения внутри корпуса устройства АЦП и трех чувствительных элементов.
Произведем разбиение на следующие модули (рисунок 2):
— модуль аналогового преобразования (АП);
— модуль цифрового преобразования (ЦП).
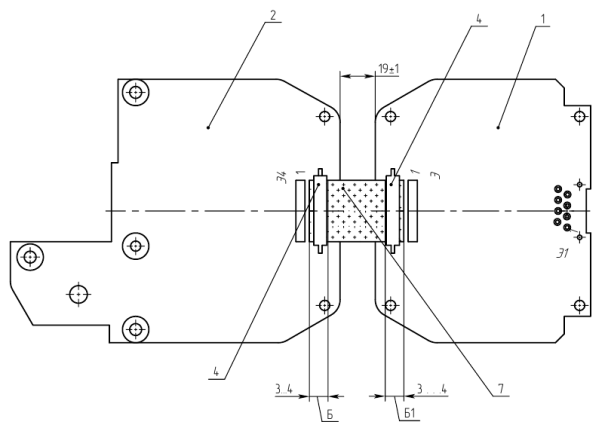
Рис. 2. Модуль для математической компенсации
1 — модуль аналогового преобразования; 2 — модуль цифрового преобразования; 4 — разъемы, 7 — шлейф гибко-жесткий
Учитывая количество ЭРЭ в схеме, все платы будут с двухсторонним размещением элементов. В этом случае платы будут иметь меньшие габариты, что позволит сделать устройство более компактным.
При данной конструкции электронного модуля блок является высокоточным, малогабаритным, вибропрочным и виброустойчивым при воздействии внешних воздействующих факторов при условии установки блока на амортизационное основание.
Литература:
- Егоров С. А., Николаев Е. В., Вельтищев В. В., Кропотов А. Н., Челышев В. А. Подход к разработке информационно-измерительных телеуправляемых подводных аппаратов //Оборонная техника. — М.: НТЦ «Информтехника», 2001 — N8–9. — С.83–92.
- Блажнов Б. А., Несенюк Л. П., Пешехонов В. Г., Старосельцев Л. П. Миниатюрные интегрированные системы ориентации и навигации для гидрографических судов и катеров // Интегрированные инерциально-спутниковые системы навигации: Сборник статей и докладов. — С-Пб.: ГНЦ РФ-ЦНИИ «Электроприбор», 2001 — С.134–143.
- Логозинский В., Сафутин И., Соломатин В. Волоконно-оптический датчик вращения с цифровым откорректированным выходом // VIII Санкт-Петербургская международная конференция по интегрированным навигационным системам: Материалы конференции. — С-Пб.: ГНЦ РФ-ЦНИИ «Электроприбор», 2001 — С.44–51.

