В статье рассмотрен алгоритм повышения достоверности определения координат в системе с GPS-приемником. Описан вариант упрощения и произведена формализация задачи, использован алгоритм Калмана для обработки фактических данных.
Ключевые слова: навигация, ошибка измерения, фильтрация Калмана, координата.
С целью проверки эффективности разработанного алгоритма повышения достоверности произведена обработка пакетов данных с GPS -модуля дальномерного канала. В состав модуля входит разработанный модуль. Он позволяют получать комплексированный сигнал с двух спутниковых систем GPS и ГЛОНАСС.
Обработанные показания представлены в виде протокола NMEA. Данный вид протокола является универсальным и используется в большинстве радиоканалов морской навигации. Это основной протокол обмена между GPS -модулем и приемным устройством. Протокол текстовой передачи ASCII.
В конечной строке пакета указана контрольная сумма пакета данных, которые начинаются после знака. Величина контрольной суммы определяется 8ми битным выражением.
По рисункам 1 и 2 видно, что оттитрованный тренд имеет значительно меньше пиков и более гладкий по сравнению с обычным пакетом данных. Это свидетельствует о том, что параметр «сигнал/шум» увеличивается и достоверность повышается.
Для оценки достоверности определим математическое ожидание
a,
м
и среднеквадратическое отклонение


где

n — количество измерений.
При анализе двух графиков, видно, что координата, определенная без разработанного модуля хуже, чем с ним. Это объясняется тем, что объясняется тем, что модуль применяет комплексированию систему оценку параметров GPS /ГЛОНАСС.
Общим недостатком любого дальномерного радиоканала — неустойчивый прием данных по каналу связи: полное отсутствие сигнала или появление значительных задержек при приеме. Например, сложно или практически невозможно определить точные координаты в местах с неустойчивым электромагнитным полем или при наличии искусственного зашумления. Недостатком использования позиционирования только по спутникам является его дециметровый диапазон и с невозможностью обеспечения устойчивого приема на всей траектории движения.
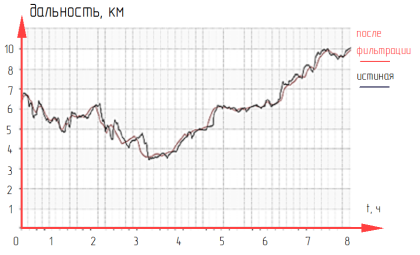
Рис. 1. Данные модуля по отношению к истиной координате
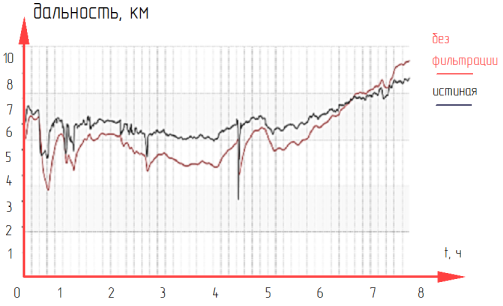
Рис. 2. Данные без модуля по отношению к истинной координате
Еще одним фактором, который резко ухудшает низкие орбиты спутников. Начиная с 55 серьезно падает уровень сигнала от спутника. Спутники системы GPS находятся на низких орбитах, это сделано для снижения точности навигации гражданских объектов и невозможности использовании их сигнала для точной навигации.
Новые системы комплексирования сигналов GPS /ГЛОНАСС позволяют повысить точность определения координат за счет использования сигнала с отечественных спутников.
Дальномерный канал радиопередатчика с применением GPS -модуля для определения координат позволяет получать точность непрерывного определения координаты на уровне 2–4 метров при использовании дополнительного сигнала с 10 спутников. Погрешность системы позиционирования ГЛОНАС составляет 6–8 метров при использовании 10 спутников. Погрешность определения координаты классическим способом, без использования GPS -модуля составляет порядка 15–30 метров со значительными задержками в линии.
При таком построении канал радиосвязи необходим устойчивый сигнал от GPS -модуля, поэтому данный вид передатчиков резервируют. В таком случае происходит увеличение достоверности определения координат по средствам разработанного алгоритма. Суммарная погрешность определения координаты не превышает 1,5–2 метров.
Экспериментальная оценка помехозащищенности GPS -канала дальномерной системы осуществляется с применением фазоманипулированные импульсов.
В нашем случае для оценки используем сигнал одной частоты, значение которой близко к несущей. Такое сочетание несущей и помехи позволят получить эффект биения в измерительном тракте. В таком случае меняется картина общего сигнала, что делает невозможным прием сигнала.
В результате между несущей сигнала и помехой возникают биения, что приводит к искажениям суммарного сигнала, делающего невозможным его прием коррелятором.
График фазоманипулированного сигнала (рисунок 3) — это синусоида с разверткой по времени. Она меняет свою фазу на противоположную в определенные (заданные) моменты времени.
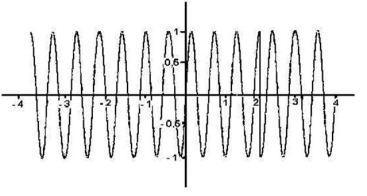
Рис. 3. Фазоманипулированный сигнал
Суперпозиция помехи и основного сигнала показана на рисунке 4.
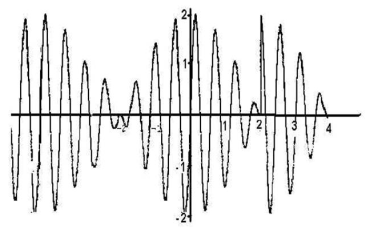
Рис. 4. Помеха и несущий сигнал
В таком случае происходит искажение несущей В — данная помеха является наиболее неблагоприятной. Математически ее можно описать следующим выражением
В=A sin wt + A sin( w + Dw ) t = 2 A cos( Dw /2) t сos( w + Dw /2) t, (3)
где w — частота несущего сигнала, Гц;
Dw — частота помехи (частота расстроенного несущего сигнала), Гц.
Полоса пропускания по входу приемника из теории передачи сигнала не должна быть меньше величины обратной времени посыла минимального пакета данных основного сигнала (t). Чем шире полоса входного устройства, тем выше точность системы позиционирования. Если в полосу пропускания входит помеха, то между ней и несущим сигналом возникает явление биения частот между несущей и частотой помехи. В результате такой суперпозиции возникает новый сигнал со значительными искажениями, на выходе приемника информационная составляющая пакета будет значительно снижена.
Рассмотрим методику проведения эксперимента.
В качестве объекта использовался летательный аппарат с установленным GPS -модулем. Приемная антенна установлена на высоте 20 м над поверхностью. Для создания описанной выше помехи использован ВЧ-генератор Г4–85. Дальность замера сигнала была небольшой — порядка 2500 м. Для индикации использовалась IBM PC со служебным приложением.
Результаты эксперимента:
— при мощности генератора 0,001 Вт и -12дБ в интервале частот 1570–1580 МГц дальномерный радиоканал не переходит в режим измерения координаты по GPS -модулю, т. к. не может определить спутники (рисунок 5);
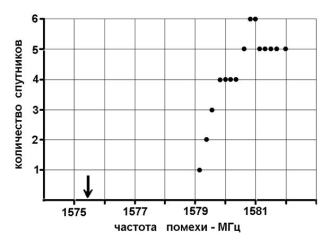
Рис. 5. Количество видимых спутников при различной частоте помехи
— при аналогичном замере траектории без воздействия помехи дальномерный радиоканал работал по сигналу от 5 спутников (рисунок 6);
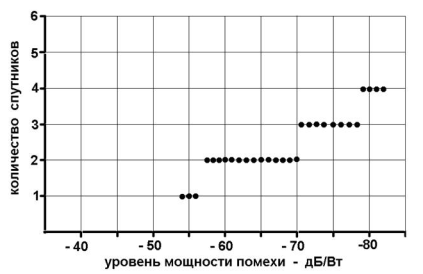
Рис. 6. Количество спутников при различном уровне мощности помехи
— при конфигурации источника помехи на интервал -1576 МГц наблюдалась неустойчивая работа дальномерного канала в режиме GPS, из-за неустойчивого приемного сигнала о спутниках;
— изменение положения источника помехи в область отрицательных углов обзора не влияет на качество работы канала.
Литература:
- Першин Д. Ю. Определение высокой точности для одночастотных приемников спутниковой навигации с использованием инерциальных датчиков [текст]/ Д. Ю. Першин, — Санкт-петербугр: Институт систем информатики СО РАН, 2014. — 417 с.
- Щербаков А. С. Определение местоположения высокой точности для одночастотных приёмников ГЛОНАСС/GPS [текст]/ А. С. Шербак — Новосибирск: Новосибирский государственный университет, МНСК-2009. -154 с.
- Ивлев Д. В. Теория построения дальномерных каналов радиосвязи [текст]/ Д. В. Ивлев — Москва: Московский авиационный институт — 2012. -325 с.

