Данная работа является продолжением статьи [1], в которой проекции векторов ![]() и
и ![]() были получены на выходе апериодических звеньев. В этой статье проекции векторов
были получены на выходе апериодических звеньев. В этой статье проекции векторов ![]() и
и ![]() выведены на основе интегрирующих звеньев.
выведены на основе интегрирующих звеньев.
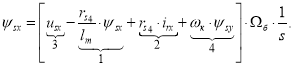
В работе [1] было получено уравнение (7’):

Обозначим ![]()
Тогда потокосцепление ψsx по оси (+1) определится в следующей форме:
Структурная схема для определения ψsx приведена на рис. 1.
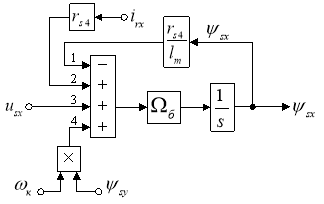
Рис. 1. Структурная схема для определения потокосцепления ψsx
Для определения тока irx приведем уравнение (8’) из работы [1]:

Перенесем ![]() в левую часть:
в левую часть:

Разделим обе части уравнения на ks:
![]()
Обозначим ![]()
Тогда irx определится в следующей форме:

Структурная схема для определения тока irx дана на рис. 2.
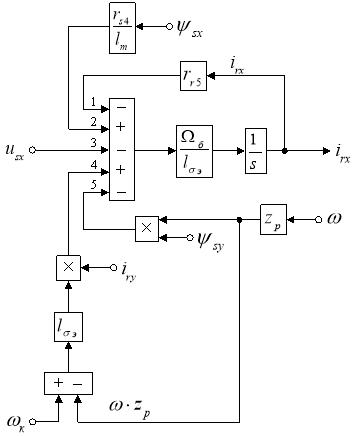
Рис. 2. Структурная схема для определения тока irx
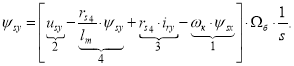
Аналогично, определим потокосцепление ψsy и ток iry по оси (+j).
Из уравнения (7”) работы [1] выразим ψsy:
![]()
Структурная схема для определения ψsy приведена на рис. 3.
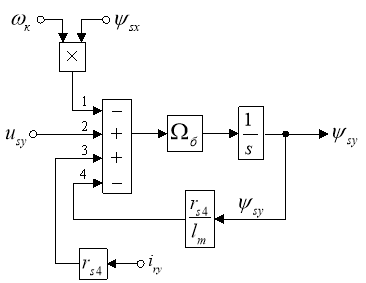
Рис. 3. Структурная схема для определения потокосцепления ψsy
Для определения iry приведем уравнение (8”) из работы [1]:

Перенесем ![]() в левую часть и разделим уравнение на ks:
в левую часть и разделим уравнение на ks:

Выразим ток iry:

Структурная схема для определения iry приведена на рис. 4.
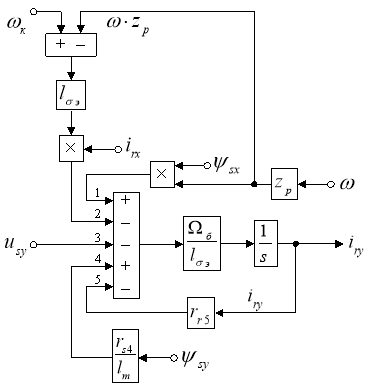
Рис. 4. Структурная схема для определения тока iry
На рис. 5 представлена структурная схема для реализации уравнения электромагнитного момента:
![]()
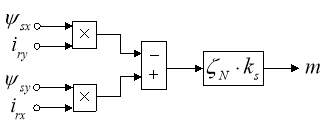
Рис. 5. Математическая модель определения электромагнитного момента m
Из уравнения движения выразим механическую угловую скорость вращения вала двигателя (рис. 6):
![]()
![]()
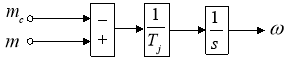
Рис. 6. Математическая модель уравнения движения
Математическая модель асинхронного двигателя с короткозамкнутым ротором с переменными ir – ψs на выходе интегрирующих звеньев приведена на рис. 7. Параметры асинхронного двигателя рассмотрены в работах [2] и [3].
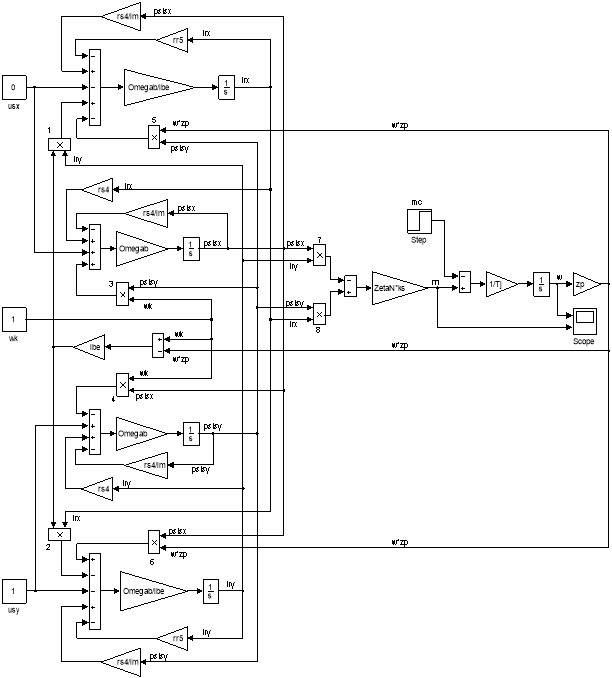
Рис. 7. Математическая модель асинхронного двигателя с переменными ir – ψs на выходе интегрирующих звеньев
Расчет параметров производим в Script:
|
PN=320000; UsN=380; IsN=324; fN=50; Omega0N=104.7; OmegaN=102.83; nN=0.944; cos_phiN=0.92; zp=3; Rs=0.0178; Xs=0.118; Rr=0.0194; Xr=0.123; Xm=4.552; |
J=28; Ub=sqrt(2)*UsN; Ib=sqrt(2)*IsN; OmegasN=2*pi*fN; Omegab=OmegasN; Omegarb=Omegab/zp; Zb=Ub/Ib; Psib=Ub/Omegab; Lb=Psib/Ib; kd=1.0084; Mb=kd*PN/OmegaN; Pb=Mb*Omegarb; rs=Rs/Zb; lbs=Xs/Zb; |
rr=Rr/Zb; lbr=Xr/Zb; lm=Xm/Zb; Tj=J*Omegarb/Mb; betaN=(Omega0N-OmegaN)/Omega0N; SsN=3*UsN*IsN; ZetaN=SsN/Pb; ks=lm/(lm+lbs); kr=lm/(lm+lbr); lbe=lbs+lbr+lbs*lbr*lm^(-1); roN=0.9962; rrk=roN*betaN; rs4=rs*ks; rr5=rrk/ks+rs4; |
Результаты моделирования асинхронного двигателя представлены на рис. 8.
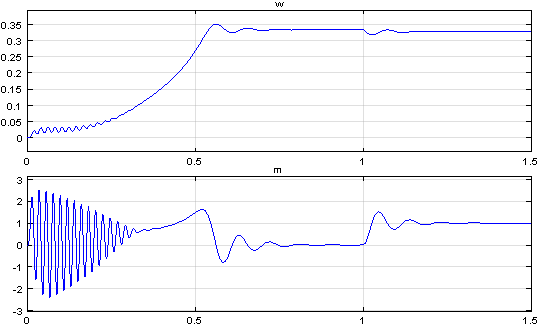
Рис. 8. Графики скорости и момента
Литература:
- Емельянов А. А., Бесклеткин В. В., Устинов А. П., Патерило А. С., Краев А. В., Насонов С. М., Худяков А. Е., Пестеров Д. И., Юнусов Т. Ш. Математическая модель асинхронного двигателя с переменными ir – ψs на выходе апериодических звеньев в Simulink-Script // Молодой ученый. – 2017. – №5.
- Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург: УРО РАН, 2000. – 654 с.
- Шрейнер Р. Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р. Т. Шрейнер, А. В. Костылев, В. К. Кривовяз, С. И. Шилин. Под ред. проф. д. т. н. Р. Т. Шрейнера. – Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. – 361 с.

