





Замкнутые системы регулируемых электроприводов, как правило, используют двухзвенные преобразователи с промежуточным звеном постоянного тока, включающие в себя неуправляемый выпрямитель, силовой фильтр (СФ) и инвертор с широтно-импульсной модуляцией. Замена диодного выпрямителя на активный преобразователь, выполненного на полностью управляемых ключах, работающий в импульсно-модуляционных алгоритмах управления, позволяет обеспечить двусторонний обмен энергией между первичны источником и двигателем, и таким образом, улучшить электромагнитную совместимость и экономичность использования электроэнергии путем повышения КПД всей системы в целом за счет рекуперации энергии движущихся частей машины. Такие активные преобразователи могут быть построены на основе автономного инвертора напряжения (АИН), если его обратить на сторону переменного тока [1 с.305; 2 с. 400].
Активный преобразователь напряжения может работать в режиме выпрямителя, если передача энергии идет из питающей сети в двигатель и сетевым инвертором пре рекуперации энергии в питающую сеть. В дальнейшем АПН, работающий в выпрямительном режиме, называется активным выпрямителем напряжения (АВН). Работа АВН основана на импульсном повышающем напряжение регуляторе, поэтому он обязательно содержит в своем составе токоограничивающий дроссель, устанавливаемый на стороне переменного тока. На выходе АПН устанавливается конденсатор, обеспечивающий стабилизацию выпрямленного напряжения. [4 с. 256].
В этих преобразователях улучшен гармонический состав тока, потребляемого из сети, а также имеется возможность получения желаемого значения коэффициента мощности, в том числе близкого к единице.
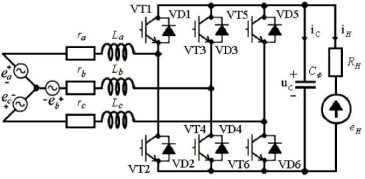
Рис. 1. Трехфазный АВН
АВН могут применяться в трех случаях [5 с.128]:
1) для получения стабильного постоянного напряжения от сети переменного с возможностью рекуперации энергии;
2) в качестве преобразователя для питания двигателей постоянного тока с возможностью регулирования скорости и рекуперативного торможения;
3) в качестве первого звена в двухзвенных преобразователях для питания асинхронных двигателей с возможностью регулирования скорости и рекуперативного торможения.
Существует несколько подходов к векторному управлению активными выпрямителями напряжения с преобразованием координат [1 с.205; 3 с.356].
В этой статье рассмотрен подход, основанный на раздельном управлении АВН по проекциям Ix и Iy обобщенного вектора сетевого тока.
Описание электромагнитных процессов проводится в ортогональной системе координат x,y, связанной с результирующим вектором питающей сети. Математическая основа преобразования координат от неподвижной (αβ) к синхронно вращающейся системе показана ниже.
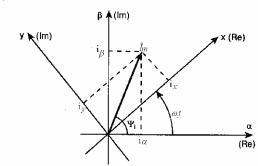
Рис. 2. Преобразование координат в векторной системе управления
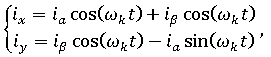
Во вращающейся системе координат вектор тока представлен в виде:
![]() ,
,
где ![]() — модуль результирующего вектора
— модуль результирующего вектора
Если принять, что ![]() и
и ![]() — соответственно активная и реактивная составляющие обобщенного вектора сетевого тока и система синхронизирована относительно сетевого напряжения, то получаем систему уравнений:
— соответственно активная и реактивная составляющие обобщенного вектора сетевого тока и система синхронизирована относительно сетевого напряжения, то получаем систему уравнений:
Коэффициент мощности, равный единице, в такой системе, при условии, что прямое и обратное преобразование синхронизированы по фазе и частоте с напряжением сети, может быть получен при задании ![]() . В этом случае справедлива система:
. В этом случае справедлива система:

Ниже представлена модель MATLAB/Simulink системы управления, использующей этот принцип.
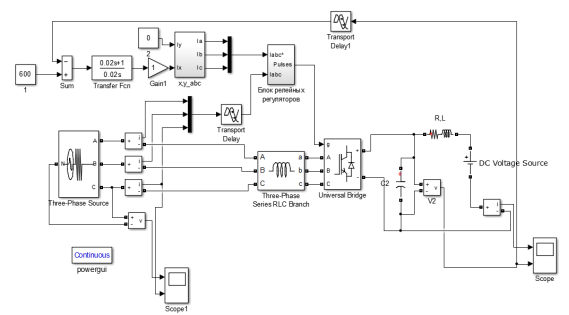
Рис. 3. Система управления АВН по проекциям обобщенного вектора тока
В этой системе управления блок преобразования координат «XY-ABC» осуществляет преобразование проекций Ix и Iy обобщенного вектора сетевого тока из вращающейся системы координат к трехфазной системе токов iA, iB, iC. Блок релейных регуляторов включает три канала, которые является обеспечивают гармонической формы сетевых токов. Блок управления включением/выключением АВН обеспечивает включение АВН в заданный момент времени.
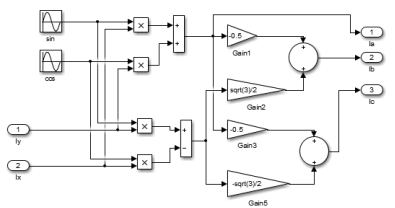
Рис. 4. Блок преобразования координат
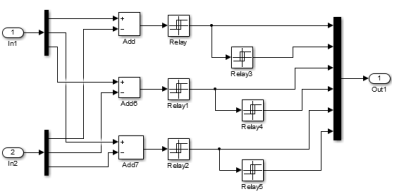
Рис. 5. Блок релейных регуляторов
В ходе моделирования была рассмотрена работа АВН в выпрямительном и инверторном режимах.
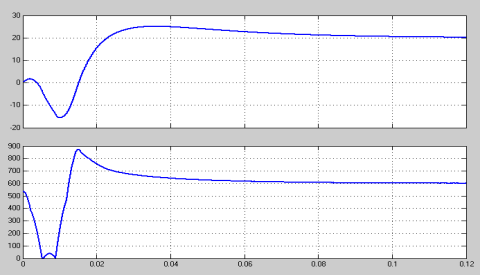
Рис. 6. Работа АВН в выпрямительном режиме
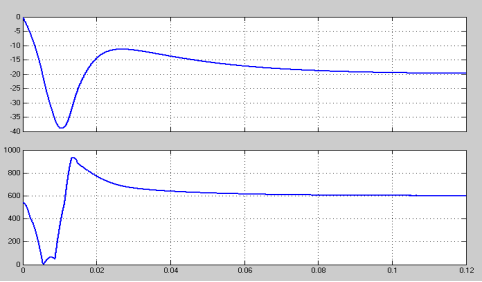
Рис. 7. Работа АВН в инверторном режиме
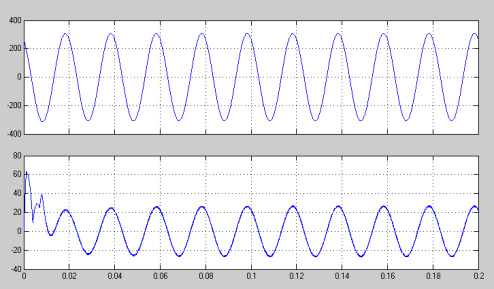
Рис. 8. Графики напряжения и тока фазы С при работе АВН в выпрямительном режиме
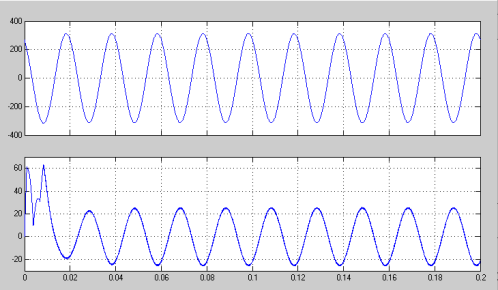
Рис. 9. Графики напряжения и тока фазы С при работе АВН в инверторном режиме
В дальнейшем, в рамках магистерской диссертации, будет проведено исследование работы активного выпрямителя напряжения в составе авиационной системы генерирования электрической энергии постоянного тока.
Литература:
- Герман-Галкин С. Г. Matlab & Simulink. Проектирование мехатронных систем на ПК. — СПб.: Корона-ВЕК, 2008. -368 с.
- Герман-Галкин С. Г. Виртуальные лаборатории полупроводниковых систем в среде Matlab-Simulink. Учебник. -СПб.: Лань, 2013. -448 с.
- Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. — Екатеринбург: УРО РАН, 2000. — 653с.
- Ефимов А. А. Активные преобразователи в регулируемых приводах переменного тока / А. А. Ефимов, Р. Т. Шрейнер. — Новоуральск: НГТИ, 2001. — 250 с.
- Ефимов А.А Математическое моделирование и испытания опытного образца активного выпрямителя напряжения / Ефимов А.А, Базарнов А. А., Глухов В. А., Зиновьев Г. С. — Красноярск: Сиб. Федер. Университет. ИКИТ, 2013. — С. 128- 134
