В статье приведена линеаризованная структурная схема системы ПЧ-АД. Дается математическое описание замкнутой системы управления ПЧ-АД, и программа расчета фазовой траектории системы.
Ключевые слова: линеаризированная система, фазовая траектория, преобразователь частоты, асинхронный двигатель.
The linearized block diagram of system of PCh — the HELL is provided in article. The mathematical description of the closed PCh-AD control system, and the program of calculation of a phase trajectory of system is given.
Keywords: linearizirovnny system, phase trayektoriya, frequency converter, asynchronous engine.
Требование устойчивости переходных процессов системы автоматического управления является основным условием нормального функционирования системы управления [1]. Для нелинейных систем управления нет единого точного метода решения нелинейных уравнений, описывающие переходные процессы системы и для каждого вида нелинейности приходится изыскивать специфический частный метод [2]. Для определения устойчивости замкнутой системы «Преобразователь частоты — асинхронный двигатель» (ПЧ-АД) выбран метод фазового пространства [3]. Данный метод позволяет получить наглядную картину переходных процессов системы автоматического управления и по фазовым траекториям определять устойчивость системы управления. Структурная схема замкнутой системы ПЧ-АД с нелинейным статическим звеном в MATLAB представлено на рисунке 1.
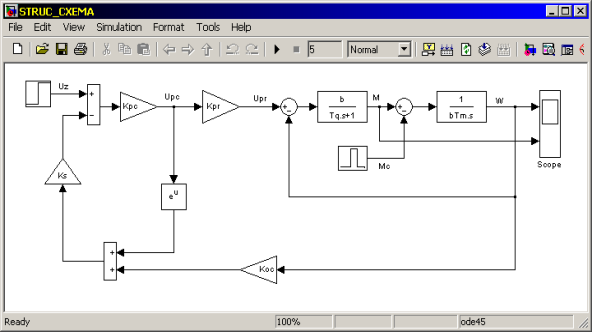
Рис. 1. Структурная схема замкнутой системы ПЧ-АД
Структурная схема асинхронного двигателя с короткозамкнутым ротором состоит из двух динамических звеньев: интегрирующего звена и инерционного звена, охваченные отрицательной обратной связью [4]. Преобразователь частоты (ПЧ) представлен в структурной схеме безынерционным звеном с передаточным коэффициентом ![]() , таким же звеном представлен регулятор скорости с коэффициентом усиления
, таким же звеном представлен регулятор скорости с коэффициентом усиления ![]() .Сигнал обратной связи с выхода нелинейного звена (
.Сигнал обратной связи с выхода нелинейного звена (![]() ), на вход которого подается сигнал с выхода регулятора скорости, и сигнал с выхода датчика скорости суммируются. Полученный сигнал, проходя через усилитель, с коэффициентом усиления
), на вход которого подается сигнал с выхода регулятора скорости, и сигнал с выхода датчика скорости суммируются. Полученный сигнал, проходя через усилитель, с коэффициентом усиления ![]() , подается на вход системы.
, подается на вход системы.
Математическое описание нелинейной системы управления ПЧ-АД можно записать в следующем виде:
![]() (1)
(1)
![]() (2)
(2)
где ![]() — угловая скорость двигателя;
— угловая скорость двигателя; ![]() — электромагнитный момент асинхронного двигателя;
— электромагнитный момент асинхронного двигателя; ![]() статический момент двигателя;
статический момент двигателя; ![]() напряжение с выхода регулятора скорости,
напряжение с выхода регулятора скорости, ![]() модуль жесткости механической характеристики АД;
модуль жесткости механической характеристики АД; ![]() электромагнитная постоянная времени цепей статора и ротора АД;
электромагнитная постоянная времени цепей статора и ротора АД; ![]() электромеханическая постоянная времени АД;
электромеханическая постоянная времени АД; ![]() передаточный коэффициент преобразователя частоты.
передаточный коэффициент преобразователя частоты.
Уравнение замкнутого контура регулятора скорости с нелинейным звеном можно записать следующим образом:
![]() (3)
(3)
или
![]() (4)
(4)
здесь ![]() коэффициент регулятора скорости;
коэффициент регулятора скорости; ![]() коэффициент обратной связи суммирующего сигнала с выхода нелинейного звена (
коэффициент обратной связи суммирующего сигнала с выхода нелинейного звена (![]() и датчика скорости;
и датчика скорости; ![]() коэффициент обратной связи по скорости системы ПЧ-АД.
коэффициент обратной связи по скорости системы ПЧ-АД.
Подставляя уравнение (4) во второе уравнение системы уравнений (1–2), после несложных преобразований, получаем следующую систему уравнений без учета задающего воздействия ![]() :
:
![]() (5)
(5)
 (6)
(6)
Отметим, что в системе уравнений (4), в нашем случае, ![]() .
.
Для получения фазового портрета системы уравнений (5–6) в MATLAB преобразуем данную систему уравнений, при ![]() , к виду:
, к виду:
![]() (7)
(7)
![]() (8)
(8)
где ![]()
![]()
![]()
![]()
![]()
Численное интегрирование уравнений (7–8), с визуализацией результата решения уравнений на фазовую плоскость, осуществляется с помощью программы в системе MATLAB. Программа расчета фазовой траектории замкнутой системы ПЧ-АД системы представлена на рисунке 2.
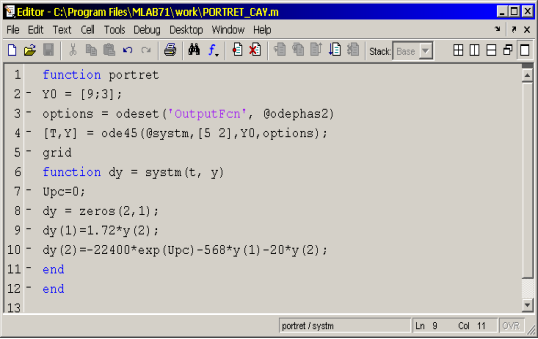
Рис. 2. Программа расчета фазового портрета системы ПЧ-АД
В программе коэффициенты системы уравнений (7–8) рассчитаны для асинхронного двигателя 4А132S6Y3 (5,5 кВT). Кроме этого, следует отметить, что в программе используется стандартная функция odephas 2MATLAB, обеспечивающая построение графика компонент решения в фазовых координатах для двумерного процесса [5].
Фазовая траектория замкнутой нелинейной системы «Преобразователь частоты — асинхронный двигатель» приведена на рисунке 3.
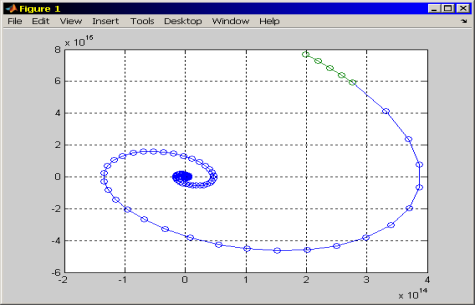
Рис. 3. Фазовая кривая замкнутой системы ПЧ-АД
Из рисунка 3 видно, что фазовая траектория системы стремится к положению равновесия (затухающий процесс). Согласно [6] система устойчива.
Выводы. Разработана математическая модель замкнутой системы ПЧ-АД.
Разработана программа расчета фазовой кривой динамики ПЧ-АД.
График фазовой кривой показывает, что замкнутая система ПЧ-АД устойчива.
Литература:
- Фельдбаум А. А., Бутковский А. Г. Методы теории автоматического управления. — М.: Издательство «Наука», 1971.
- Воронов А. А. Основы теории автоматического управления. Л. — М.: Издательство «Энергия», 1966.
- Бесекерский В. А., Попов Е. П. Теория систем автоматического управления. — СПб: Издательство «Профессия», 2004.
- Терехов И. М., Осипов О. И. Системы управления электроприводов. — М.: Издательский центр «Академия», 2008.
- Ануфриев И. Е., Смирнов А. Б., Смирнова Е. Н. MATLAB 7. — СПб.: БХВ — Петербург, 2005.
- Попов Е. П. Теория нелинейных систем автоматического регулирования и управления. — М.: «Наука», 1988.

