Для автоматического управления различными технологическими процессами, рабочими механизмами и машинами используются логические системы управления, которые состоят из логических элементов. Логические элементы могут быть использованы как самостоятельные части схемы, когда применяются в качестве управляющей логики какого-либо устройства; в качестве комбинационных схем, которые используются в составе микросхем БИС и СБИС и как составляющие в схемах с памятью (триггеры, счетчики и т. д.).
Предварительно обратимся к перечню основных логических элементов, их обозначениям и записи соответствующих логических операций (табл. 1) [1].
Таблица 1
|
№ |
Логический элемент |
Графическое обозначение |
Логическая операция |
|
1 |
Элемент «НЕ» (отрицание, инверсия) |
|
не А |
|
2 |
Элемент «И» (логическое умножение) |
|
А×В; АÙВ |
|
3 |
Элемент «ИЛИ» (логическое сложение) |
|
А+В; АÚВ |



Кроме того, применяются операции — исключающее ИЛИ (сложение по модулю 2, строгая дизъюнкция, XOR) (рис. 1а.), инверсии логического сложения (операция ИЛИ-НЕ, стрелка Пирса) (рис. 1б) и инверсии логического умножения (операция И-НЕ, штрих Шеффера) (рис. 1в).

а) б) в)
Рис. 1. Логические элементы: исключающее ИЛИ (а), ИЛИ-НЕ (б) и И-НЕ (в)
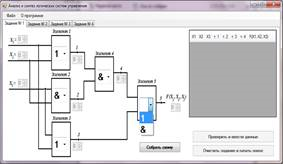
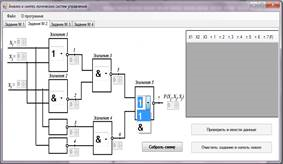
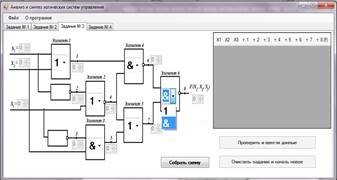
В статье [1] предложена авторская программа «Анализ и синтез логических систем управления», которая подходит для изучения основ работы логических элементов и систем. Первое задание позволяет изучить работу элементов «И» и «ИЛИ» (рис. 2а), второе — работу элементов «НЕ», «И-НЕ» и «ИЛИ-НЕ» (рис. 2б), а третье — работу всех перечисленных элементов («И, «ИЛИ», «НЕ»,«И-НЕ» и «ИЛИ-НЕ») (рис. 2в). К недостаткам данной программы следует отнести:
1) ограничение по количеству логических элементов (5–6 элементов);
2) используются только элементы «И», «ИЛИ», «НЕ», «И-НЕ», «ИЛИ-НЕ»;
3) фиксированное соединение элементов.
а) б)
в)
Рис. 2. Программа «Анализ и синтез логических систем управления» [1]
Для устранения недостатков данной программы и дальнейшего изучения работы логических систем, с точки зрения усложнения их структур и возможности модификаций, необходимо применять программы, реализующие принцип визуального программирования, в соответствии с которым пользователь на экране из библиотеки стандартных блоков (рис. 3) создает модель устройства и осуществляет расчеты. К таким программам можно отнести Simulink (приложение Matlab) и Xcos (приложение Scilab). Стоит отметить, что Scilab — это пакет прикладных математических программ, предоставляющий открытое окружение для инженерных (технических) и научных расчётов и самая полная общедоступная альтернатива Matlab [2], а Xcos является бесплатной альтернативой Simulink.


а) б)
Рис. 3. Библиотеки стандартных блоков Matlab/Simulink (а) и Scilab/Xcos (б)
Для построения логических систем в Matlab/Simulink, в разделе LogicandBitOperations библиотеки Simulink (рис. 3а) имеется блок LogicalOperator (рис. 4) с помощью которого можно задать любую логическую функцию из заданного перечня, которые определяются свойствами блока.
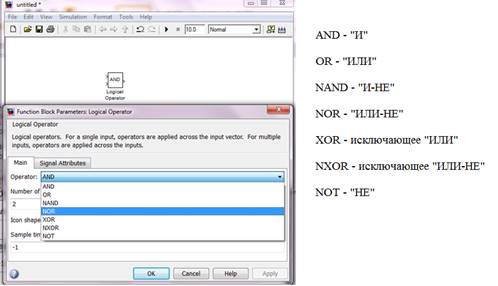
Рис. 4. Свойства блока LogicalOperator
Область построения логической схемы разобьем на 4 блока: блок входных переменных, блок инверсий (может отсутствовать), блок логических операций и блок результата (рис. 5). В блоке Входных переменных с помощью блоков Constant задаются значения входных переменных — в виде одного значения (0 или 1) (рис. 5а) и в виде вектора (рис. 5б). В блоках Инверсий и Логических операций размещаются блоки LogicalOperator с заданными свойствами, а в блоке Результат — блок Display, который показывает результат вычисления логической схемы при заданных входных переменных X1, X2, X3.
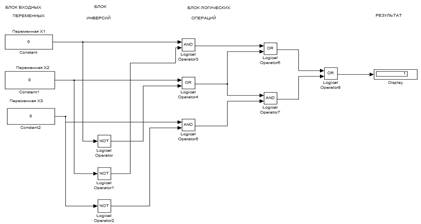
а)
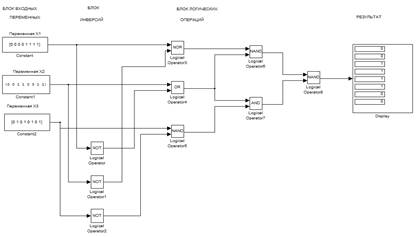
б)
Рис. 5. Схемы логических систем в Matlab/Simulink
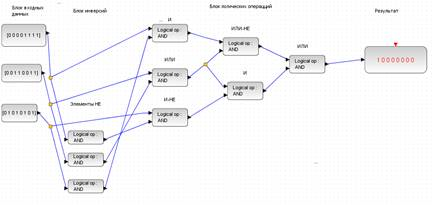
Процесс построения логических систем в Scilab/Xcos. аналогичен предыдущему, но отличается перечнем логических функций в блоке Logicalop (рис. 6) и в отличие от аналогичного блока в Matlab/Simulink при изменении логической функции название блока не меняется, поэтому на схемах (рис. 7) сделаны надписи над блоками, указывающие какие логические функции они выполняют.
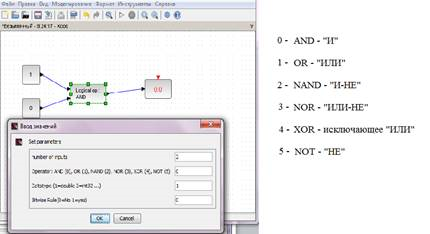
Рис. 6. Свойства блока Logical op
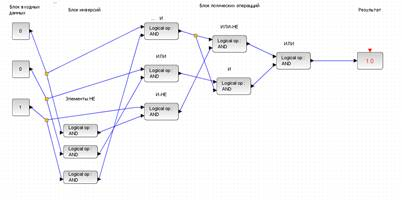
а)
б)
Рис.7. Схемы логической систем в Scilab/Xcos
Из проведенного анализа видно, что процесс построения логических систем в Matlab/Simulink и Scilab/Xcos одинаков, хотя и имеет отличия, связанные с перечнем логических функций. Рассмотренные приложения могут применяться для изучения работы логических систем, с точки зрения усложнения их структур и возможности модификаций.
Литература:
1. Кожанов Р. В., Кожанова Е. Р., Ткаченко И. М., Захаров А. А. Автоматизация процесса проектирования логических систем управления // Актуальные проблемы электронного приборостроения АПЭП — 2014: материалы международ. научно-технич. конференции (25–26 сентября 2014, Саратов). Саратов, 2014. Т. 2. С. 153–158.
2. Scilab: [Электронный ресурс]. URL: https://ru.wikipedia.org/wiki/Scilab (Дата обращения: 25.12.2014).

