Введение
Для робототехнической системы важной задачей является задача идентификации ситуации в текущий момент времени. Решение этой задачи входит в реализацию интеллектуальных алгоритмов управления.
Управление объектами с применением методов искусственного интеллекта — интеллектуальное управление. В связи с автономность роботов и недостатка информации об окружающей среде и различных видов неопределенности широко распространены методы искусственного интеллекта.
Постановка задачи
Необходимо сформировать подход и общие принципы управления робототехническими системами, учитывающие неполноту входной информации, и работающих в динамически изменяющейся окружающей обстановке.
В связи с этим сформулируем ряд задач:
- разработать архитектуру интеллектуальной системы управления;
- разработать алгоритм идентификации и оценки окружающей среды;
- разработать на основе этих данных систему управления.
Методы исследования
Для решения поставленных задач используются методы теории нечетких множеств, технологии нечёткой логики, теории дифференциальных уравнений, теории автоматического управления, методы обработки цифровых изображений, теории нейронных сетей.
Определение положения системы во внешней среде
Первоначальной задачей, и одной из самых важных для робототехнической системы, является задача определения текущего положения, в которой находится робототехническая система.
Для этого, устройство интеллектуального мобильного робота должно включать программную часть. Прежде чем представить структурную схему системы управления и ситуационной идентификации, необходимо сформулировать ряд задач, которые должна решать система управления. Вот эти задачи:
- планирование траекторий движения;
- разбор целевого задания и разбиение этого задания на ряд подзадач;
- для выполнения движения по сформированным траекториям, необходимо выработать задающие воздействия для исполнительных механизмов робота;
На рисунке 1 представлена схема системы управления.
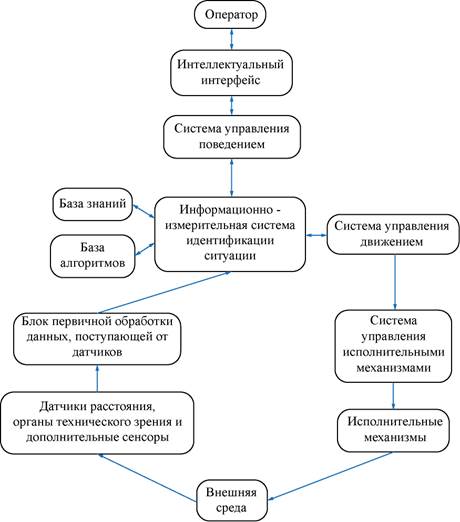
Рис. 1. Структурная схема системы управления и ситуационной идентификации.
Блок первичной обработки данных получает необработанную информацию с датчиков о состоянии внешней среды. В этом блоке данные собираются, сгруппировываются и подвергаются обработке. На выходе получаются отформатированные данные, передающиеся по стандартным протоколам. Это необходимо для удобства подключения новых датчиков, и четкой систематизации данных, что в дальнейшем облегчает работу с данными.
Информационно-измерительная система идентификации ситуации на основе обработанных данных выстраивает картину окружающего мира. Данные с датчиков преобразуются в набор параметров, на основе которых другие подсистемы принимают решения. Параметры формируются с помощью базы знаний и алгоритмов. Здесь же производится распознавание окружающих объектов и построение сенсорной карты среды.
В базе алгоритмов содержатся математические алгоритмы для выстраивания на основе данных целевой сенсорной карты, распознавания окружающей обстановки и предметов (распознавание звуковых образов и изображений, цифровая обработка сигналов), вычисление необходимых параметров, и проверка полученных данных.
База знаний представляет информацию о внешней среде, заложенную на этапе обучения и приобретаемую в процессе функционирования. Знания упорядочиваются и обновляются.
Система управления поведением разбивает поставленную задачу на последовательность подзадач и формирует поведение робота для выполнения задач. Формирует целевую точку, соответствующие режимы работы информационно-измерительной системы идентификации. От неё получает данные о процессе выполнения и отображает их пользователю. Также предоставляет пользователю обработанную информацию о ситуации и сенсорную карту, полученную от информационно — измерительной системы идентификации.
Система управления движением, учитывая динамические свойства робота и неопределенность среды, формирует значение скорости движения и направление для осуществления поставленных целей.
Интеллектуальный интерфейс используется для связи с оператором. Его задача заключается в том, чтобы контролировать функционирование робота и осуществлять наблюдение за процессом выполнения поставленных целей.
Блок первичной обработки производит обработку и анализ изображений, поступающих от оптико-электронных систем. Учитывая характер решаемых задач, необходимо учесть следующие ограничения и особенности:
1) информация о характеристиках фона и наблюдаемых объектов чаще всего содержит неточные размеры объектов или вовсе отсутствует;
2) в связи с ограниченностью времени на принятие решений и наличием замкнутого контура управления движением обработка, анализ и распознавание должны выполняться в реальном времени;
3) работа системы управления, слежения и обработки должна проводиться при минимальном участии человека или в автономном режиме.
В сложных условиях, улучшить качество сигнала и результата наблюдения можно с помощью алгоритмов оценивания параметров геометрических преобразований изображений и методов пространственно-временной фильтрации. Среди них можно выделить четыре основных метода.
1. Для измерения положения неподвижных и движущихся объектов, наблюдаемых на однородном и неоднородном фоне, используются методы на основе сравнения с эталоном.
2. Используя информацию о статистических свойствах объекта и фона можно выделять движущиеся и неподвижные объекты, наблюдаемые на сравнительно однородном фоне. Такие методы называются методы статистической сегментации.
3. При обнаружении объектов на фоне ясного или облачного неба максимальную эффективность показывают методы выделения объектов с помощью пространственной фильтрации. Данные методы используют операции линейной и нелинейной пространственной фильтрации изображений.
4. Методы выделения динамических изменений основаны на выделении изменений, происходящих с течением времени в наблюдаемой группе изображений. Такие методы применяются при решении задачи выделения движущихся объектов.
На рисунке 2 представлена структура системы обнаружения объектов, которая включает перечисленные выше концепции.

Рис. 2. Структура программно-алгоритмического обеспечения оптико-электронной системы обнаружения объектов.
Реализация управления в условиях неопределенности внешней среды
Для решения задачи управления робототехнической системой в условиях неопределенности используется технология динамических экспертных систем. Динамическая экспертная система в своей основе содержит базу знаний, состав которой адаптируется с течением времени. За счет корректирующих алгоритмов осуществляется изменение и обновление неактуальных правил. Такая экспертная система обучается самостоятельно.
От качества проектирования базы знаний экспертной системы будет зависеть эффективность выполнения поставленных целей. База знаний проектируется на этапе разработки системы управления. Блок самообучения должен обладать возможностью оценки знаний, а именно их полноты и качества, а также возможностью коррекции базы знаний.
При планировании траектории движения робота к целевой точке необходимо учитывать динамические и конструктивные возможности робота, а также заданные особенности поведения. Для этого используем теорию нечетких множеств.
Нейронной сети нет необходимости создавать математическую модель объекта. Нейронная сеть воспринимает объект как «черный ящик». Нейросетевая система управления имеет эталонную модель управления роботом. По разнице выходных сигналов объекта и модели нейросетевая система настраивает устройство управления и производит соответствующую корректировку процессов управления.
Литература:
1. Юревич Е. И. Основы робототехники. — СПб.: БХВ-Петербург, 2007. — 416 с.
2. Рутковская Д., Плинский М., Рутковский Л., Нейронные сети, генетические алгоритмы и нечеткие системы: Пер. с польск. И. Д. Рудинского. — М.: Горячая линия — Телеком, 2006. — 452 с.

