




Кинематический и силовой анализ схемы зубчатого вариатора момента с не-симметричным дифференциалом

Авторы: Лысянский Вячеслав Анатольевич, Кузнецов Сергей Анатольевич, Ярута Алексей Вячеславович
Рубрика: 7. Машиностроение
Опубликовано в
II международная научная конференция «Актуальные вопросы технических наук» (Пермь, февраль 2013)
Статья просмотрена: 1098 раз
Библиографическое описание:
Лысянский, В. А. Кинематический и силовой анализ схемы зубчатого вариатора момента с не-симметричным дифференциалом / В. А. Лысянский, С. А. Кузнецов, А. В. Ярута. — Текст : непосредственный // Актуальные вопросы технических наук : материалы II Междунар. науч. конф. (г. Пермь, февраль 2013 г.). — Т. 0. — Пермь : Меркурий, 2013. — С. 55-58. — URL: https://moluch.ru/conf/tech/archive/73/3436/ (дата обращения: 26.04.2024).
Кинематическая схема зубчатого вариатора момента с несимметричным дифференциалом представлена на рисунке 1.
Устройство состоит из дифференциального механизма, входным звеном которого является водило 1 с сателлитами и двумя центральными колесами 4 и 5, установленными на выходных валах 2 и 3 соответственно, один из которых соединен с водилом 6 планетарного механизма, который выполнен двухрядным, а на водиле 6 установлен с возможностью вращения блок сателлитов 7, образованный двумя соосными сателлитами с равным числом зубьев, взаимодействующими с двумя центральными соосными зубчатыми колесами 8, одно из которых закреплено неподвижно, а ко второму подвижному колесу жестко прикреплен рычаг управления 9 вариатором [1].
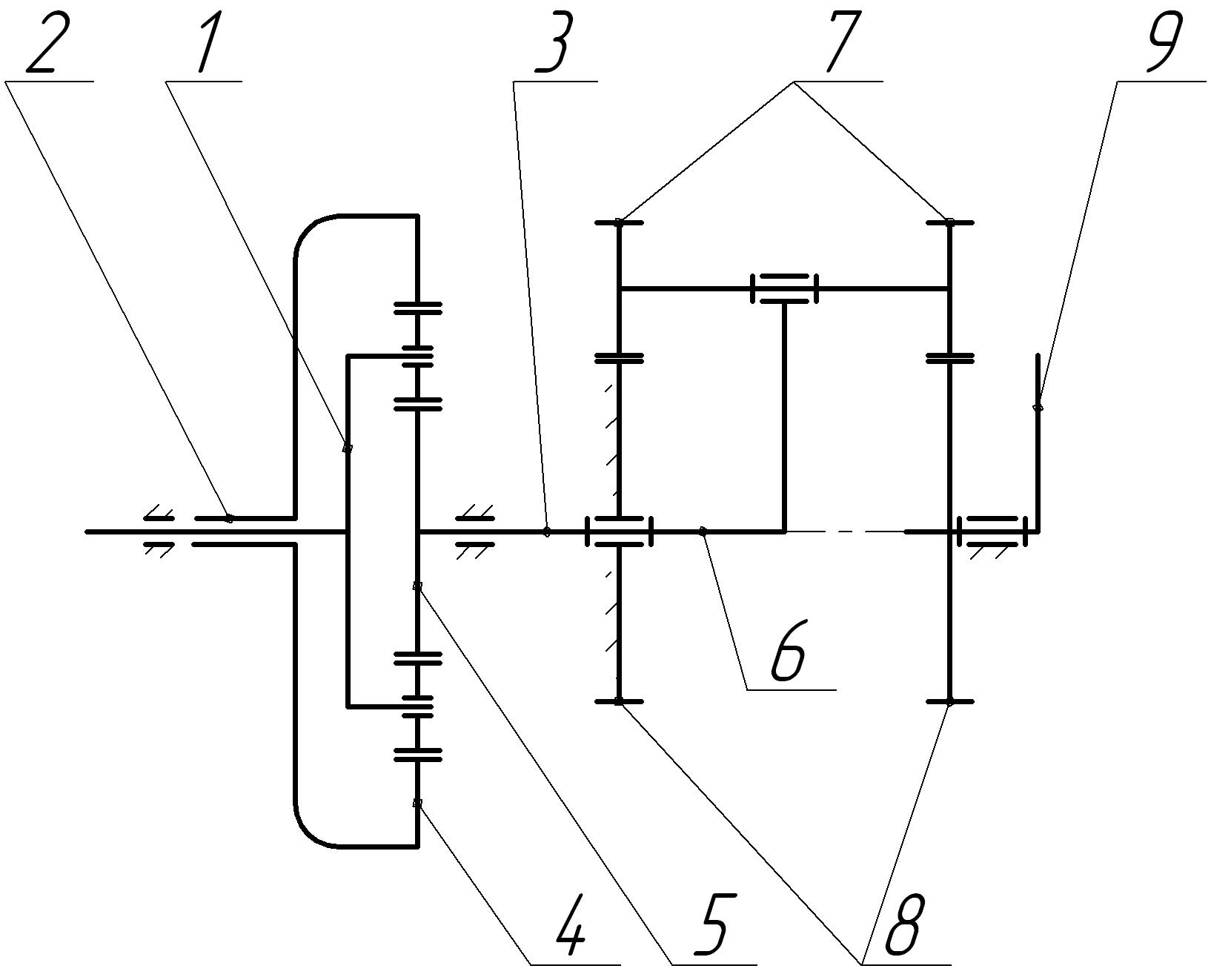
Рис. 1. Кинематическая схема зубчатого вариатора момента
Вариатор работает следующим образом. Вращение от двигателя подается на водило 1 дифференциала. Полученное водилом движение делится между выходными валами 2 и 3 с центральными колесами 4 и 5 соответственно. При неподвижном выходном вале 2 движение центрального колеса 5 передается на водило планетарного механизма 6, которое вместе с блоком сателлитов 7 свободно вращается вокруг центральных зубчатых колес 8, которые остаются неподвижными, поскольку одно из них закреплено неподвижно, а передаточное отношение равно бесконечности при равных числах зубьев центральных зубчатых колес 8. При приложении управляющего момента на рычаг управления 9 свободное движение водила 6 с блоком сателлитов 7 затормаживается, и возникающий момент торможения на валу водила 6 способствует возникновению крутящего момента на выходном валу 2 вариатора, причем этот момент пропорционален управляющему усилию. Угловая скорость выходного вала 2 также начинает увеличиваться по мере преодоления момента полезного сопротивления пропорционально управляющему воздействию.
Рассмотрим кинематические и силовые параметры вариатора представленного на рисунке 1 в зависимости от того, какое из звеньев дифференциала будет ведущим, ведомым или управляемым (рисунок 2)
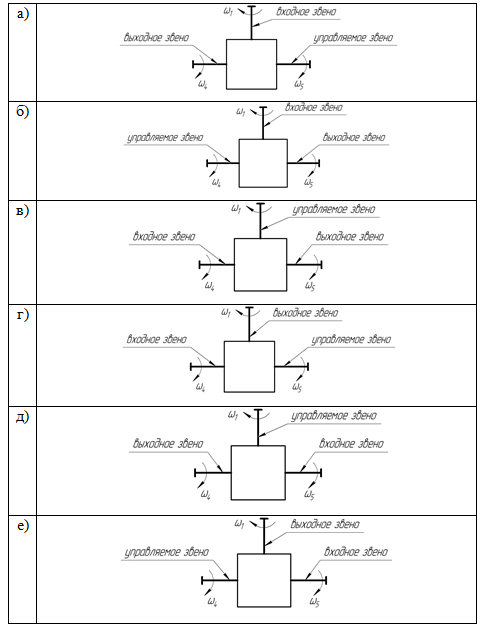
Рис. 2. Варианты расположения звеньев вариатора
Для определения угловых скоростей звеньев дифференциала используем формулу Виллиса [2, 3]:
 . (1)
. (1)
Передаточное отношение
![]() определяется через радиусы начальных окружностей
определяется через радиусы начальных окружностей
![]() зубчатых колес или через числа их зубьев
зубчатых колес или через числа их зубьев
![]()
![]() .
.
Обозначим величину
![]() (знак «-» так как центральные колеса при остановленном
водиле вращаются в разные стороны) через р.
(знак «-» так как центральные колеса при остановленном
водиле вращаются в разные стороны) через р.
Тогда зависимость между моментами на центральных колесах (5 и 4) и водила (Н) без учета потерь на трение [2]:
![]() ;
;
или (2)
![]() .
.
Используя формулы (1) и (2) определим кинематические и силовые зависимости вариатора.
Первый вариант (рисунок 2, а)
Водило 1 (Н) — входное звено, центральное колесо 5 соединено с нагружателем (управляющее звено), центральное колесо 4 соединено с ведомым валом (выходное звено).
При
![]() угловая скорость выходного звена будет иметь максимальное значение,
которое составит
угловая скорость выходного звена будет иметь максимальное значение,
которое составит
![]() .
.
Таким образом, угловая скорость
![]() ведомого вала 4 изменяется в пределах
ведомого вала 4 изменяется в пределах
![]() .
.
Силовые параметры выходного звена (крутящий момент
![]() и мощность
и мощность
![]() )
без учета к. п.д. дифференциала связаны соотношениями
)
без учета к. п.д. дифференциала связаны соотношениями
![]() ;
;
![]() .
.
Второй вариант (рисунок 2, б)
Водило 1 (Н) — входное звено, центральное колесо 5 выходное звено центральное колесо 4 соединено с нагружателем (управляющее звено).
При
![]() угловая скорость выходного звена будет иметь максимальное значение,
которое составит
угловая скорость выходного звена будет иметь максимальное значение,
которое составит
![]() .
.
Таким образом, угловая скорость
![]() ведомого вала 5 изменяется в пределах
ведомого вала 5 изменяется в пределах
![]() .
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
![]() ;
;
![]() .
.
Третий вариант (рисунок 2, в)
Центральное колесо 4 — входное звено, центральное колесо 5 управляемое звено, а водило 1 (Н) выходное звено.
При
![]() угловая скорость выходного звена будет иметь максимальное значение,
которое составит
угловая скорость выходного звена будет иметь максимальное значение,
которое составит
![]() .
.
Таким образом, угловая скорость
![]() выходного звена изменяется в пределах
выходного звена изменяется в пределах
![]() .
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
![]() ;
;
![]() .
.
Четвертый вариант (рисунок 2, г)
Центральное колесо 4 — входное звено, центральное колесо 5 выходное звено, а водило 1 (Н) управляемое звено.
При
![]() угловая скорость выходного звена будет иметь максимальное значение,
которое составит
угловая скорость выходного звена будет иметь максимальное значение,
которое составит
![]() .
.
Таким образом, угловая скорость
![]() выходного звена изменяется в пределах
выходного звена изменяется в пределах
![]() .
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
![]() ;
;
![]() .
.
Пятый вариант (рисунок 2, д)
Центральное колесо 5 — входное звено, центральное колесо 4 управляемое звено, а водило 1 (Н) выходное звено.
При
![]() угловая скорость выходного звена будет иметь максимальное значение,
которое составит
угловая скорость выходного звена будет иметь максимальное значение,
которое составит
![]() .
.
Таким образом, угловая скорость
![]() ведомого вала 4 изменяется в пределах
ведомого вала 4 изменяется в пределах
![]() .
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
![]() ;
;
![]() .
.
Шестой вариант (рисунок 2, е)
Центральное колесо 5 — входное звено, центральное колесо 4 выходное звено, а водило 1 (Н) управляемое звено.
При
![]() угловая скорость выходного звена будет иметь максимальное значение,
которое составит
угловая скорость выходного звена будет иметь максимальное значение,
которое составит
![]() .
.
Таким образом, угловая скорость
![]() выходного звена изменяется в пределах
выходного звена изменяется в пределах
![]() .
.
Силовые параметры выходного звена без учета к. п.д. дифференциала связаны соотношениями
![]() ;
;
![]() .
.
Проведенный кинематический и силовой анализ позволяет определить оптимальное расположение входного, выходного и управляемого звеньев зубчатого вариатора момента при использовании его в составе привода технологической машины, для максимально эффективной работы исполнительного органа при выполнении технологических операций.
Литература:
Пат. № 2445531 Российская федерация МПК F16H 3/74, F16H. Вариатор момента [Текст] / Кузнецов С. Н., Владимиров А. В., Лысянский В. А., Старченко И. Е.; заявитель и правообладатель Государственное образовательное учреждение высшего профессионального образования «Южно-Российский государственный университет экономики и сервиса» (ГОУ ВПО «ЮРГУЭС») — № 2010149799/11; заявл. 03.12.2010; опубл. 20.03.2012, Бюл. № 8.
Артоболевский И. И. Теория механизмов и машин [Текст] / И. И. Артоболевский. — М.: Наука, 1988. — 640 с.
Кирдяшев Ю. Н. Многопоточные передачи дифференциального типа [Текст] / Ю. Н. Кидряшев. — М.: машиностроение, 1981. — 231 с.