




Известные нереверсивные ленточные фрикционы лесных лебедок, имеющие сервоусилители, позволяют обойтись без силовой системы управления. Однако такие фрикционы отличает сложность конструкции и большая работа включения при реверсировании момента внешней нагрузки (односторонность действия). С целью уменьшения работы включения нами была предложена ленточная муфта, устраняющая перечисленные недостатки, которая защищена авторским свидетельством № 528394 (рис. 1).
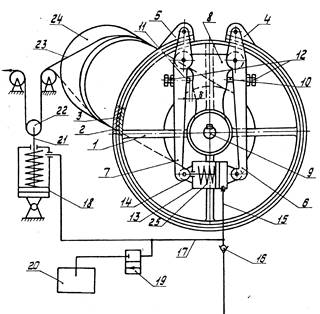
Рисунок 1 Ленточная муфта
1 – ведомая полумуфта; 2 – металлическая лента; 3 – фрикционная накладка; 4, 5 – колодки; 6, 7 – рычаги; 8 – ведущая полумуфта; 9 – вал; 10, 11 – выступы; 12 – винты; 13 – гильза; 15 – магистраль питания гидроцилиндра; 16 – обратный клапан; 17 – трубопровод; 18 – сервоцилиндр; 19 – золотник; 20 – система слива; 21 – шток; 22 – подвижный блок; 23 – канат; 24 – барабан; 25 – возвратная пружина
Теоретический анализ функционирования лебедки в целом позволяет определить, как влияют параметры ленточной муфты на эффективность работы лебедки, прежде всего, на скорость и плавность сцепления ведущего вала с тросовым барабаном. Математическая модель, позволяющая исследовать это, описывает динамику и взаимосвязь отдельных элементов лебедки: системы привода, ведущей и ведомой части фрикционной муфты, ленточного тормоза, тросового барабана [1].
Для описания динамического поведения лебедки будем считать ее состоящей из пяти тел вращения, взаимодействующих между собой (рис. 2.). Тела в модели вращаются соосно, взаимодействуя между собой вязкоупругими силами или силами трения. Размеры и форма прямоугольников на рис. 2 приближенно передают форму составных тел лебедки и их моменты инерции. Тело D имитирует систему привода лебедки (двигатель и редуктор); R и V – ведущая и ведомая полумуфты фрикционного устройства новой конструкции; B – барабан лебедки с тросом; T – ленточный тормоз; С – корпус лебедки.
Каждое из тел вращается с собственной угловой скоростью (ниже угловая скорость обозначаются ωi, где индекс i соответствующие индексу тела: ωD, ωR, ωV, ωB, ωT). Инерционные свойства тел задаются моментами инерции Ji (далее используются обозначения JR, JV, JB, JT). Для того чтобы учесть в модели динамическую податливость механизма считается, что следующие пары тел взаимодействуют вязкоупругими силами: D и R (коэффициент угловой жесткости CRD, коэффициент углового демпфирования βRD); B и V (CBV, βBV); T и C (CTC, βTC) [2, 3].
Движение составных частей лебедки индуцируется движением тела D, имитирующим привод лебедки. В модели учитывается, что при возникновении нагрузки на лебедке двигатель снижает обороты (принят пропорциональный закон снижения):
 (1)
(1)
где ω0 – угловая скорость вращения вала на холостых оборотах;
kD – коэффициент пропорциональности;
MRD – момент, с которым тело R действует на тело D.
Момент MRD, как правило, принимает отрицательные значения, поэтому с приложением нагрузки частота вращения линейно снижается.
Вращение ведущей полумуфты R определяется моментом, действующим со стороны привода MRD, и моментом сил сцепления в фрикционном устройстве MVR. В соответствии с основным законом динамики вращательного движения можем записать следующее уравнение движения.
 (2)
(2)
где φR – момент инерции и угловая координата ведущей полумуфты;
t – время.
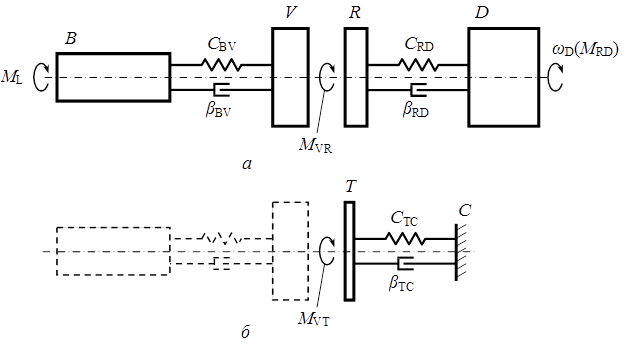 Рисунок 2 – Расчетная динамическая схема лебедки
Рисунок 2 – Расчетная динамическая схема лебедки
а – фрикционная муфта сцеплена; б – ленточный тормоз сцеплен
Аналогичным образом записываются уравенния движения тел V, B и T:
 (3)
(3)
 (4)
(4)
 (5)
(5)
где φV, φB, φT – угловые координаты ведомой полумуфты, тросового барабана и ленточного тормоза;
MBV – момент вязкоупругого углового взаимодействия ведомой полумуфты и барабана;
ML – вращающий момент со стороны наматываемого троса;
MVT – момент сил сцепления, возникающих на поверхностях ленточного тормоза;
MTC – момент сил связи ленточного тормоза с корпусом лебедки.
Вязкоупругое угловое взаимодействие тел описывается общепринятым способом:
 (6)
(6)
 (7)
(7)
 (8)
(8)
Силы, возникающие на канате в процессе работы лебедки в общем случае трудно описываются теоретически, так как необходимо учитывать провисание и натяжение троса, взаимодействие трелируемого бревна с лесной почвой, случаи подъема одного конца бревна при контактирующем с почвой другим концом и т.п. Рассмотрение этих случаев может быть предметом отдельной работы; для целей же анализа динамики лебедки достаточно использовать простейшую зависимость ML(φB, ωB), соответствующую волочению бревна по поверхности при постоянно натянутом нерастяжимом тросе:
 (9)
(9)
где kL – коэффициент вязкого сопротивления вращению барабана.
Поиск подходящих зависимостей для моментов сил сцепления MVR и MTC представляет собой сложную задачу, так как необходимо учесть статическое и кинетическое трение и влияние давления на управляющем пневмоцилиндре PУ. Поэтому выражение для момента MVR зависит от режима трения ("буксование" или "сцепление"):
 (10)
(10)
где Pкр.ф. – критический уровень давления в управляющем пневмоцилиндре, при котором включается фрикцион;
βVR – коэффициент вязкого трения фрикционной пары;
kP – коэффициент пропорциональности;
CVR – коэффициент упругой податливости фрикционной пары в режиме "сцепление";
φRR – угловое положение ведущей полумуфты, равное положению φR в момент времени, соответствующий смене режима "буксование" на "сцепление".
Множитель (PУ–Pкр.ф.) в формуле (2.117) обеспечивает линейную зависимость момента сцепления от давления на управляющем пневмоцилиндре. Линейность необходима для сохранения взаимосвязи с полученными ранее результатами для статического трения (в частности, с выражением для MT). При этом коэффициент пропорциональности kP зависит от конструктивных параметров фрикционной муфты:
 (11)
(11)
где DT – диаметр шкива;
iT – передаточное число механизма включения, которое вследствие небольшой величины пути включения можно принять постоянным;
ηТ – к.п.д. механизма включения;
γt – угол между направлением вектора усилия включения и нормалью-радиусом, проведенным в точку пересечения вектором усилия цилиндра трения;
γТ – угол между направлением вектора усилия в шарнирном заякоривающем звене и нормалью-радиусом, проведенным в точку пересечения вектором усилия цилиндра трения;
ρt и ρT – углы трения в точке включения и заякоривающем звене;
μ – коэффициент трения;
α0 – угол обхвата барабаном гибкой части ленты.
Введение двух режимов трения связано с тем, что при высоких скоростях контакта фрикционных поверхностей возникает момент вязкого трения и осуществляется буксование, а при уменьшении скорости контакта поверхности в некоторый момент времени жестко сцепляются (чему способствует и конструкция фрикциона), при этом можно считать связь ведущей и ведомой муфты вязкоупругой с параметрами CVR и βVR. Переходы из режима "буксование" в режим "сцепление" и обратно производится по условиям, соответственно,
 (12)
(12)
 (13)
(13)
где ωкр – критическая угловая скорость смены режимов трения.
Сопротивление, оказываемое ленточным тормозом, рассчитывается следующим образом (учитывается только вязкое трение ленточного тормоза о поверхность полумуфты).
 (14)
(14)
где Pкр.л. – критический уровень давления в управляющем пневмоцилиндре, при котором включается ленточный тормоз;
βVT – коэффициент вязкого трения при торможении.
Таким образом, математическая модель лебедки представляет собой систему дифференциальных уравнений (1-5), описывающих движение и взаимодействие отдельных тел системы. Вследствие того, что в основе модели лежит большое количество уравнений, не имеет смыла искать решение системы в аналитической форме, так как оно будет громоздким и сложным для анализа. Следует воспользоваться численным интегрированием и анализировать процессы на основе проведения компьютерных экспериментов.
Библиографический список
1. Попиков, П. И. Повышение эффективности гидрофицированных машин при лесовосстановлении на вырубках [Текст] : [монография] / П. И. Попиков; Воронеж. гос. лесотехн. акад. - Воронеж, 2001. – 156 с. : ил. - ISBN 5-7994-0079-8.
2. Кондратьев Л. П. Исследование и совершенствование ленточных фрикционных устройств подъемно-транспортных машин [Текст] : монография / Л. П. Кондратьев, Н. И. Послухаев, П. И. Попиков ; Фед. агентство по образованиию, ГОУ ВПО «ВГЛТА». – Воронеж, 2009. – 264 с.
3. Журавлев, И. Н. Моделирование рабочего процесса лесной фрезерной почвообрабатывающей машины с двухпоточным предохранительным устройством [Текст] / И. Н. Журавлев, С. В. Пономарев // Вестн. КрасГАУ. − 2009. − № 7 − С. 142-146.
