




В работе [1] рассматривался процесс математического моделирования линейного асинхронного двигателя (2p = 2, Z1 = 6) на основе магнитных схем замещения. Питание обмотки индуктора (соединение «звезда» с нулевым проводом, классический тип укладки обмотки) осуществлялось от источника трехфазного синусоидального напряжения.
В данной работе рассматривается процесс математического моделирования линейного асинхронного двигателя (ЛАД) при питании от трехфазного автономного инвертора напряжения с широтно-импульсной модуляцией (АИН ШИМ). Результаты этой работы будут основой для создания учебно-лабораторной установки по исследованию системы АИН ШИМ – ЛАД.
Функциональная схема системы трехфазный автономный инвертор с ШИМ – линейный асинхронный двигатель приведен на рис. 1.
В этой схеме приняты следующие обозначения:
-  и
и  - задающие гармонические воздействия:
- задающие гармонические воздействия:
-  – опорное напряжение, представляющее собой пилообразное, двухстороннее, симметричное напряжение с частотой модуляции значительно превышающей частоту напряжения задания.
– опорное напряжение, представляющее собой пилообразное, двухстороннее, симметричное напряжение с частотой модуляции значительно превышающей частоту напряжения задания.
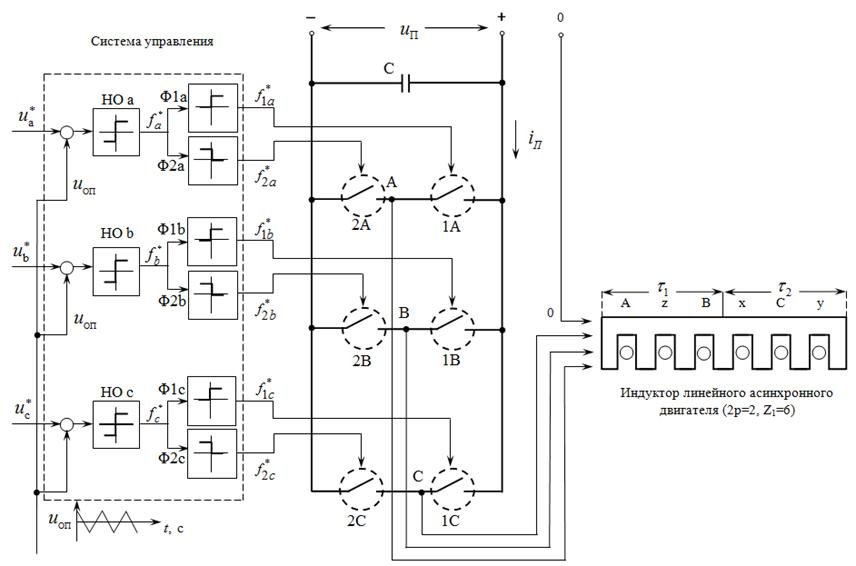
Рис. 1. Функциональная схема системы «АИН ШИМ – ЛАД» с нулевым проводом
-  и
и  – нуль-органы, обеспечивающие сравнение сигналов задания с опорным сигналом. Если
– нуль-органы, обеспечивающие сравнение сигналов задания с опорным сигналом. Если  то выходные сигналы нуль-органов
то выходные сигналы нуль-органов  иначе
иначе 
-
|
 и
и 
 и
и 
 и
и  – формирователи сигналов управления силовыми ключами. Формирователи сигналов управления имеют взаимно инверсные релейные характеристики [2] и сепаратируют сигнал нуль-органа НО по двум каналам управления ключами инвертора. Кроме того предусматривают небольшие временные задержки включения ключей. Это необходимо для предотвращения коротких замыканий источника постоянного напряжения
– формирователи сигналов управления силовыми ключами. Формирователи сигналов управления имеют взаимно инверсные релейные характеристики [2] и сепаратируют сигнал нуль-органа НО по двум каналам управления ключами инвертора. Кроме того предусматривают небольшие временные задержки включения ключей. Это необходимо для предотвращения коротких замыканий источника постоянного напряжения  через силовые ключи инвертора.
через силовые ключи инвертора.-  и
и 
 и
и 
 и
и  - дискретные выходные сигналы с формирователей, управляющих включением силовыми ключами.
- дискретные выходные сигналы с формирователей, управляющих включением силовыми ключами.
-  и
и 
 и
и 
 и
и  – силовые ключи, попеременно подключающие обмотки фаз двигателя к разноименным полюсам источника постоянного напряжения .
– силовые ключи, попеременно подключающие обмотки фаз двигателя к разноименным полюсам источника постоянного напряжения .
Цифровой алгоритм расчета опорного сигнала ШИМ приведен в работе [3]. Программирование выходных сигналов нуль-органов произведен в MATLAB и имеет следующий вид:
dt=0.00001;
U0=1;
tau=0;
time=0;
u0p(1)=1;
pwm=-2;
f_sin=50;
f_triangle=1000;
for i=1:8000
tau(i+1)=tau(i)+dt*f_triangle;
time(i+1)=time(i)+dt;
s(i+1)=3*sin(2*pi*f_sin*time(i+1));
s_pi3(i+1)=3*sin(2*pi*f_sin*time(i+1)+pi/3);
if tau(i+1)>=1
tau(i+1)=tau(i+1)-1;
end
if (tau(i+1)>=0) && (tau(i+1)<0.5)
f(i)=1-4*tau(i+1);
else
f(i)=4*tau(i+1)-3;
end
u0p(i+1)=U0*f(i);
if (s(i+1)>=u0p(i+1))
pwm(i+1)=2;
else
pwm(i+1)=-2;
end
if (s_pi3(i+1)>=u0p(i+1))
pwm_pi3(i+1)=2;
else
pwm_pi3(i+1)=-2;
end
end
subplot(2,1,1);
plot(time,s,time,u0p,time,pwm);
hold on;
axis([0 0.04 -4 4]);
subplot(2,1,2);
plot(time,s_pi3,time,u0p,time,pwm_pi3);
hold on;
axis([0 0.04 -4 4]);
Результаты сравнений  с для трех значений (
с для трех значений (
 и
и  ) приведены на рис. 2, 3 и 4 соответственно (сплошными линиями обозначены выходные сигналы
) приведены на рис. 2, 3 и 4 соответственно (сплошными линиями обозначены выходные сигналы  с нуль-органа).
с нуль-органа).
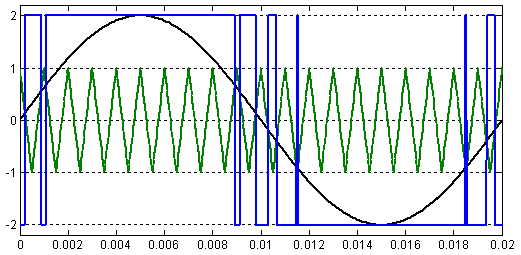
Рис. 2. Сигнал на выходе нуль-органа  при
при 
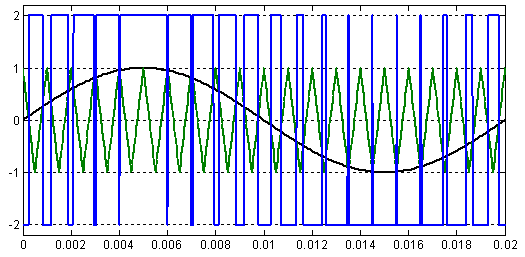
Рис. 3. Сигнал на выходе нуль-органа при
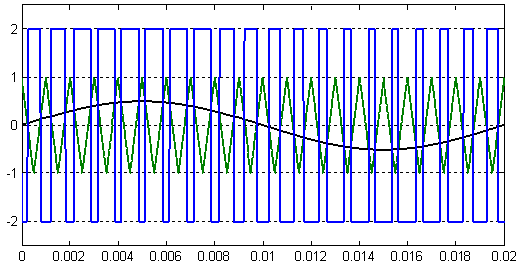
Рис. 4. Сигнал на выходе нуль-органа при
Формирователи сигналов управления силовыми ключами ( и и и ) задают программу подключения фаз обмоток двигателя к источнику постоянного напряжения  .
.
Фазное напряжение в обмотке двигателя представляет собой пятиуровневую импульсную функцию [2] со значениями:

Импульсные напряжения, подаваемые на двигатель, и  связаны с постоянным напряжением и выходными сигналами нуль-органов
связаны с постоянным напряжением и выходными сигналами нуль-органов 
 и
и  по следующей зависимости [2]:
по следующей зависимости [2]:
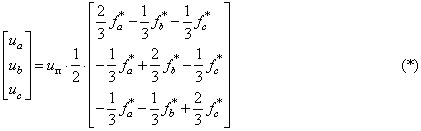
Уравнения (*) для решения в программном пакете MATLAB примут следующий вид:
dt=0.00001;
U0=1;
tau=0;
time=0;
u0p(1)=1;
pwm=-1;
um=2;
f_sin=50;
f_triangle=1000;
Um=310/2;
up=Um;
for i=1:8000
tau(i+1)=tau(i)+dt*f_triangle;
time(i+1)=time(i)+dt;
s(i+1)=um*sin(2*pi*f_sin*time(i+1));
s_2pi3(i+1)=um*sin(2*pi*f_sin*time(i+1)+2*pi/3);
s_4pi3(i+1)=um*sin(2*pi*f_sin*time(i+1)+4*pi/3);
if tau(i+1)>=1
tau(i+1)=tau(i+1)-1;
end
if (tau(i+1)>=0) && (tau(i+1)<0.5)
f(i)=1-4*tau(i+1);
else
f(i)=4*tau(i+1)-3;
end
u0p(i+1)=U0*f(i);
if (s(i+1)>=u0p(i+1))
pwm(i+1)=2;
else
pwm(i+1)=-2;
end
if (s_2pi3(i+1)>=u0p(i+1))
pwm_2pi3(i+1)=2;
else
pwm_2pi3(i+1)=-2;
end
if (s_4pi3(i+1)>=u0p(i+1))
pwm_4pi3(i+1)=2;
else
pwm_4pi3(i+1)=-2;
end
PWM(i+1)=up*(1/2)*((2*(pwm(i+1)))/3-(pwm_2pi3(i+1))/3-(pwm_4pi3(i+1))/3);
PWM_2pi3(i+1)=up*(1/2)*(-pwm(i+1)/3+(2*pwm_2pi3(i+1))/3-pwm_4pi3(i+1)/3);
PWM_4pi3(i+1)=up*(1/2)*(-pwm(i+1)/3-pwm_2pi3(i+1)/3+(2*pwm_4pi3(i+1))/3);
end
plot(time,PWM);
axis([0 0.02 -250 250]);
Результаты расчета фазного напряжения  для задающих сигналов с и приведены на рис. 5, 6 и 7 соответственно.
для задающих сигналов с и приведены на рис. 5, 6 и 7 соответственно.
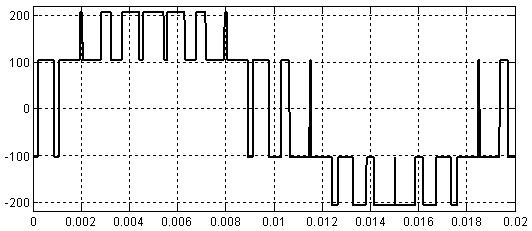
Рис. 5. Импульсное напряжение в фазе обмотки при амплитуде задающего сигнала
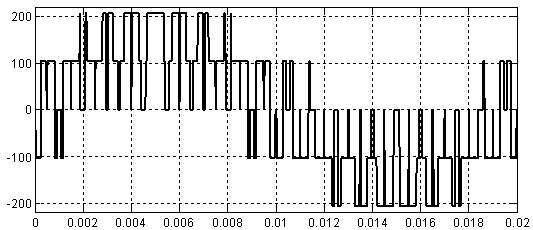
Рис. 6. Импульсное напряжение в фазе обмотки при амплитуде задающего сигнала
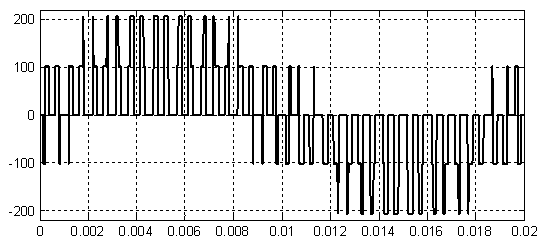
Рис. 7. Импульсное напряжение в фазе обмотки при амплитуде задающего сигнала
Программирование системы «АИН ШИМ - ЛАД» на языке высокого уровня MATLAB имеет следующий вид:
% Математическая модель АИН ШИМ - ЛАД с укладкой статорной обмотки классическим способом (z=6) с нулевым проводом
function lad_z12_6_zero_PWM
% Исходные данные асинхронного двигателя
Rb=0.1003*10^7;
rs=4.75;
LsA=0.037;
LsB=0.038;
LsC=0.035;
rr=(9.269*10^-5);
Lr=(0.0372*10^-5);
dt=0.000011;
As=rs+LsA/dt;
Bs=rs+LsB/dt;
Cs=rs+LsC/dt;
tz=9.769*10^-3;
m=3.8*0.2;
v0=0;
wn=200;
f=50;
w=2*pi*f;
UA=wn/dt;
Um=310/1.73;
X=zeros(18,1);
F=0;
um=0.5;
kinv=(190*0.5)/2;
% начальные условия для ШИМ
tau=0;
time=0;
U0=1;
u0p(1)=1;
pwm=-1;
f_triangle=1000;
f_sin=50;
K=input('длительность цикла k=');
for k=1:(K+1)
% ШИМ
tau(k+1)=tau(k)+dt*f_triangle;
time(k+1)=time(k)+dt;
s(k+1)=um*sin(2*pi*f_sin*time(k+1));
s_2pi3(k+1)=um*sin(2*pi*f_sin*time(k+1)-2*pi/3);
s_4pi3(k+1)=um*sin(2*pi*f_sin*time(k+1)-4*pi/3);
if tau(k+1)>=1
tau(k+1)=tau(k+1)-1;
end
if (tau(k+1)>=0) && (tau(k+1)<0.5)
f(k)=1-4*tau(k+1);
else
f(k)=4*tau(k+1)-3;
end
u0p(k+1)=U0*f(k);
if (s(k+1)>=u0p(k+1))
pwm(k+1)=2;
else
pwm(k+1)=-2;
end
if (s_2pi3(k+1)>=u0p(k+1))
pwm_2pi3(k+1)=2;
else
pwm_2pi3(k+1)=-2;
end
if (s_4pi3(k+1)>=u0p(k+1))
pwm_4pi3(k+1)=2;
else
pwm_4pi3(k+1)=-2;
end
PWM(k+1)=kinv*(1/2)*((2*(pwm(k+1)))/3-(pwm_2pi3(k+1))/3-(pwm_4pi3(k+1))/3);
PWM_2pi3(k+1)=kinv*(1/2)*(-pwm(k+1)/3+(2*pwm_2pi3(k+1))/3-pwm_4pi3(k+1)/3);
PWM_4pi3(k+1)=kinv*(1/2)*(-pwm(k+1)/3-pwm_2pi3(k+1)/3+(2*pwm_4pi3(k+1))/3);
v(1,k)=v0; %создание вектор-строки для графика скорости
f(1,k)=sum(F); %Создание вектор-строки для графика усилия
i0(1,k)=X(18);
i_a(1,k)=X(15);
i_b(1,k)=X(17);
i_c(1,k)=X(16);
% Формирование матрицы А
A=zeros(18);
B=2*Rb*(rr+Lr/dt)+1/dt;
B1=6*Rb*(rr+Lr/dt)+(-4*Rb)*Lr*v0/(2*tz)+1/dt;
B2=55*Rb*(rr+Lr/dt)+(-45*Rb)*Lr*v0/(2*tz)+1/dt;
B3=550*Rb*(rr+Lr/dt)+(-450*Rb)*Lr*v0/(2*tz)+1/dt;
B4=1000*Rb*(rr+Lr/dt)+1/dt;
B5=550*Rb*(rr+Lr/dt)+450*Rb*Lr*v0/(2*tz)+1/dt;
B6=55*Rb*(rr+Lr/dt)+(45*Rb)*Lr*v0/(2*tz)+1/dt;
B7=6*Rb*(rr+Lr/dt)+(4*Rb)*Lr*v0/(2*tz)+1/dt;
C=-Rb*(rr+Lr/dt)+(2*Rb*Lr+1)*v0/(2*tz);
C1=-Rb*(rr+Lr/dt)+(6*Rb*Lr+1)*v0/(2*tz);
C2=-5*Rb*(rr+Lr/dt)+(55*Rb*Lr+1)*v0/(2*tz);
C3=-50*Rb*(rr+Lr/dt)+(550*Rb*Lr+1)*v0/(2*tz);
C4=-500*Rb*(rr+Lr/dt)+(1000*Rb*Lr+1)*v0/(2*tz);
C5=-500*Rb*(rr+Lr/dt)+(550*Rb*Lr+1)*v0/(2*tz);
C6=-50*Rb*(rr+Lr/dt)+(55*Rb*Lr+1)*v0/(2*tz);
C7=-5*Rb*(rr+Lr/dt)+(6*Rb*Lr+1)*v0/(2*tz);
D=-Rb*Lr*v0/(2*tz);
D1=5*D;
D2=50*D;
D3=500*D;
E=-Rb*(rr+Lr/dt)-(2*Rb*Lr+1)*v0/(2*tz);
E1=-5*Rb*(rr+Lr/dt)-(6*Rb*Lr+1)*v0/(2*tz);
E2=-50*Rb*(rr+Lr/dt)-(55*Rb*Lr+1)*v0/(2*tz);
E3=-500*Rb*(rr+Lr/dt)-(550*Rb*Lr+1)*v0/(2*tz);
E4=-500*Rb*(rr+Lr/dt)-(1000*Rb*Lr+1)*v0/(2*tz);
E5=-50*Rb*(rr+Lr/dt)-(550*Rb*Lr+1)*v0/(2*tz);
E6=-5*Rb*(rr+Lr/dt)-(55*Rb*Lr+1)*v0/(2*tz);
E7=-Rb*(rr+Lr/dt)-(6*Rb*Lr+1)*v0/(2*tz);
T=-wn*Lr*v0/(2*tz);
Y=-wn*(rr+Lr/dt);
W1=-wn*Lr/dt;
P=-Rb*Lr/dt;
Q=(2*Rb*Lr+1)/dt;
Q1=(6*Rb*Lr+1)/dt;
Q2=(55*Rb*Lr+1)/dt;
Q3=(550*Rb*Lr+1)/dt;
Q4=(1000*Rb*Lr+1)/dt;
for n=1:3
A(n+3,n+14)=(-1)^(n+1)*T;
A(n+4,n+14)=(-1)^(n+1)*Y;
A(n+5,n+14)=(-1)^n*T;
A(n+6,n+14)=(-1)^n*T;
A(n+7,n+14)=(-1)^n*Y;
A(n+8,n+14)=(-1)^(n+1)*T;
end;
for n=1:3
A(18,n+14)=1;%hh
end;
A(18,18)=-1;%jgj
for n=1:6
A(n+4,n+4)=B;
A(n+5,n+4)=E;
A(n+3,n+4)=C;
end;
for n=1:7
A(n+2,n+4)=D;
A(n+5,n+3)=-D;
end;
A(1,1)=B4;
A(1,2)=C5;
A(1,3)=D2;
A(2,1)=E4;
A(2,2)=B5;
A(2,3)=C6;
A(2,4)=D1;
A(3,1)=-D3;
A(3,2)=E5;
A(3,3)=B6;
A(3,4)=C7;
A(4,2)=-D2;
A(4,3)=E6;
A(4,4)=B7;
A(5,3)=-D1;
A(5,4)=E7;
A(10,11)=C1;
A(10,12)=D1;
A(11,11)=B1;
A(11,12)=C2;
A(11,13)=D2;
A(12,11)=E1;
A(12,12)=B2;
A(12,13)=C3;
A(12,13)=D3;
A(13,11)=-D1;
A(13,12)=E2;
A(13,13)=B3;
A(13,14)=C4;
A(14,12)=-D2;
A(14,13)=E3;
A(14,14)=B4;
A(15,5)=UA;
A(16,7)=UA;
A(17,9)=UA;
A(15,8)=-UA;
A(16,10)=-UA;
A(17,6)=-UA;
A(15,15)=As;
A(16,17)=Bs;
A(17,16)=Cs;
% Матрица свободных членов
S=[ Q4*X(1)+P*( 500*X(2)); %1
Q3*X(2)+P*(500*X(1)+50*X(3)); %2
Q2*X(3)+P*(50*X(2)+5*X(4)); %3
Q1*X(4)+P*(5*X(3)+X(5)); %4
W1*X(15)+Q*X(5)+P*(X(4)+X(6)); %5
(-1)*W1*X(16)+Q*X(6)+P*(X(5)+X(7)); %6
W1*X(17)+Q*X(7)+P*(X(6)+X(8)); %7
(-1)*W1*X(15)+Q*X(8)+P*(X(7)+X(9)); %8
W1*X(16)+Q*X(9)+P*(X(8)+X(10)); %9
(-1)*W1*X(17)+Q*X(10)+P*(X(9)+X(11)); %10
Q1*X(11)+P*(X(10)+5*X(12)); %11
Q2*X(12)+P*(5*X(11)+50*X(13)); %12
Q3*X(13)+P*(50*X(12)+500*X(14)); %13
Q4*X(14)+P*500*X(13); %14
UA*(X(5)-X(8))+(LsA/dt)*X(15)+PWM(k+1); %15
UA*(X(7)-X(10))+(LsB/dt)*X(17)+PWM_2pi3(k+1); %16
UA*(X(9)-X(6))+(LsC/dt)*X(16)+PWM_4pi3(k+1); %17
0]; %18
% Решение методом Гаусса-Жордана
Z=rref([A S]); %Приведение расширенной матрицы к треугольному виду
X=Z(1:18,19:19); %Выделение последнего столбца из матрицы
% Ток в роторе
Ir=[ 1000*Rb*X(1)-Rb*(500*X(2)); %1
550*Rb*X(2)-Rb*(500*X(1)+50*X(3)); %2
55*Rb*X(3)-Rb*(50*X(2)+5*X(4)); %3
6*Rb*X(4)-Rb*(5*X(3)+X(5)); %4
-wn*X(15)+2*Rb*X(5)-Rb*(X(4)+X(6)); %5
(-1)*(-wn)*X(16)+2*Rb*X(6)-Rb*(X(5)+X(7)); %6
-wn*X(17)+2*Rb*X(7)-Rb*(X(6)+X(8)); %7
(-1)*(-wn)*X(15)+2*Rb*X(8)-Rb*(X(7)+X(9)); %8
-wn*X(16)+2*Rb*X(9)-Rb*(X(8)+X(10)); %9
(-1)*(-wn)*X(17)+2*Rb*X(10)-Rb*(X(9)+X(11)); %10
6*Rb*X(11)-Rb*(X(10)+5*X(12)); %11
55*Rb*X(12)-Rb*(5*X(11)+50*X(13)); %12
550*Rb*X(13)-Rb*(50*X(12)+500*X(14)); %13
1000*Rb*X(14)-Rb*(500*X(13))]; %14
% Электромагнитное усилие
F(1)=X(2)*Ir(1)/(2*tz);
for n=1:12
F(n+1)=(X(n+2)-X(n))*Ir(n+1)/(2*tz);
end;
F(14)=-X(13)*Ir(14)/(2*tz);
% Скорость
v0=v0+(sum(F)/m)*dt;
end;
% Построение графиков
k=0:K;
subplot(2,1,1);
plot(k*dt,v);
title('Скорость');
xlabel('t,c');
ylabel('v,m/c');
grid on;
subplot(2,1,2);
plot(k*dt,f);
title('');
xlabel('t,c');
ylabel('F,H');
grid on;
end
Временные диаграммы скорости и электромагнитного усилия линейного асинхронного двигателя при питании от АИН с амплитудой напряжения задания 
 и
и  представлены на рис. 8, 9 и 10 соответственно.
представлены на рис. 8, 9 и 10 соответственно.
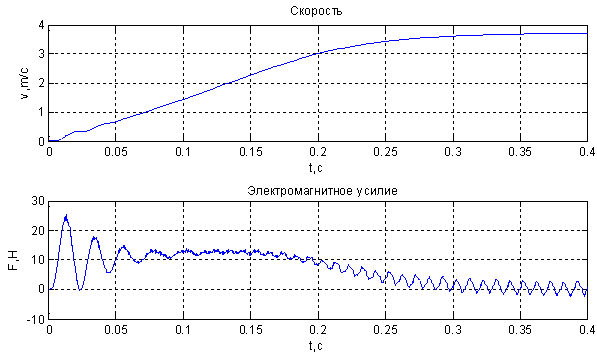
Рис. 8. Результат моделирования линейного асинхронного двигателя при 
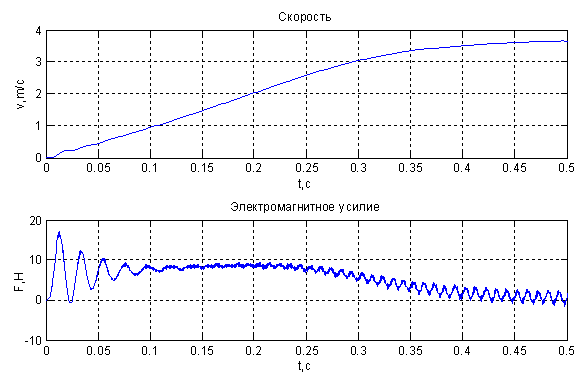
Рис. 9. Результат моделирования линейного асинхронного двигателя при
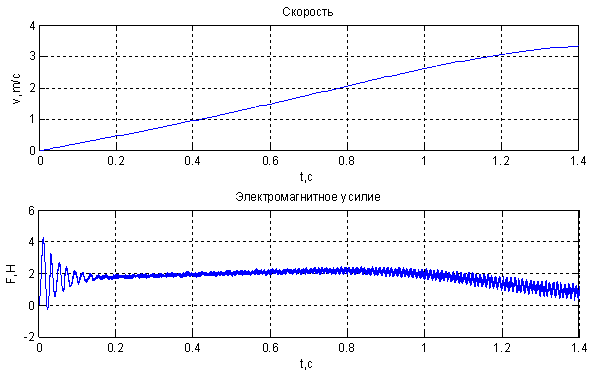
Рис. 10. Результат моделирования линейного асинхронного двигателя при
Временные зависимости при приведены на рис. 11.
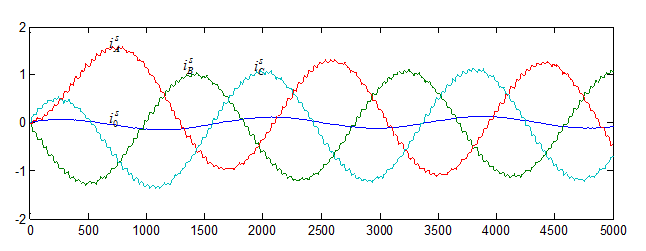 Рис. 11. Результат моделирования системы АИН ШИМ – ЛАД в режиме прямого пуска при um = 0,5
Рис. 11. Результат моделирования системы АИН ШИМ – ЛАД в режиме прямого пуска при um = 0,5
Временные зависимости скорости и токов  ,
,  ,
,  и
и  системы АИН ШИМ - ЛАД в режиме прямого пуска (um = 1), полученные на математической модели, представлены на рис. 12.
системы АИН ШИМ - ЛАД в режиме прямого пуска (um = 1), полученные на математической модели, представлены на рис. 12.
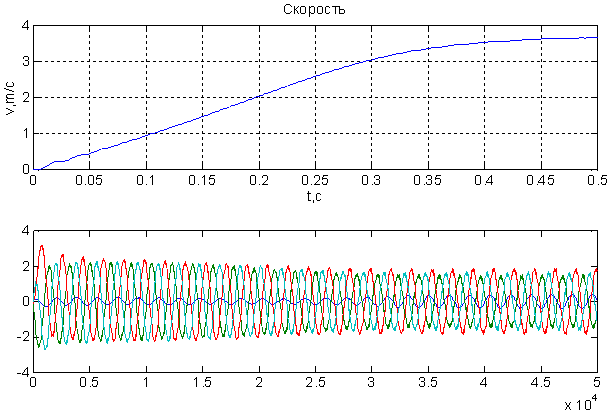
Рис. 12. Результат моделирования системы АИН ШИМ – ЛАД в режиме прямого пуска при um = 1
Примечание: к сожалению, в работе [1] нами были допущены ошибки при определении элементов s15, s16 и s17 матрицы-столбца S, поэтому эту часть приводим вновь с исправлениями.
Элементы строк 15 и 16 и 17 матрицы А и соответствующие элементы матрицы-столбца S определяются из баланса электрических напряжений обмоток статора.
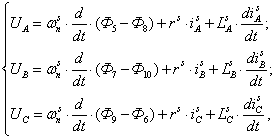
где 


С учетом шага по времени ∆t в k-ый момент времени:
n = 15.
Выразим производные тока , потоков  и
и  через конечные разности:
через конечные разности:



Обозначим 

Аналогично для строк 16 и 17:
n = 16.


n = 17.


%Математическая модель ЛАД с укладкой статорной обмотки классическим
%способом (z=6) с нулевым проводом
%function lad_z12_6_zero
%Исходные данные асинхронного двигателя
Rb=0.1003*10^7;
rs=9.5;
LsA=0.037;
LsB=0.038;
LsC=0.035;
rr=4.6345*10^-5;
Lr=0.0372*10^-5;
dt=0.0011;
As=rs+LsA/dt;
Bs=rs+LsB/dt;
Cs=rs+LsC/dt;
tz=9.769*10^-3;
m=1.9;
v0=0;
wn=200;
f=50;
w=2*pi*f;
UA=wn/dt;
Um=310/(2*1.73);
X=zeros(18,1);
F=0;
K=input('Длительность цикла k=');
for k=1:(K+1)
v(1,k)=v0; % Создание вектор-строки для графика скорости
f(1,k)=sum(F); % Создание вектор-строки для графика усилия
i0(1,k)=X(18);
i_a(1,k)=X(15);
i_b(1,k)=X(17);
i_c(1,k)=X(16);
Ua=Um*cos(w*(k-1)*dt);
Ub=Um*cos(w*(k-1)*dt-2*pi/3);
Uc=Um*cos(w*(k-1)*dt-4*pi/3);
%Формирование матрицы А
A=zeros(18);
B=2*Rb*(rr+Lr/dt)+1/dt;
B1=6*Rb*(rr+Lr/dt)+(-4*Rb)*Lr*v0/(2*tz)+1/dt;
B2=55*Rb*(rr+Lr/dt)+(-45*Rb)*Lr*v0/(2*tz)+1/dt;
B3=550*Rb*(rr+Lr/dt)+(-450*Rb)*Lr*v0/(2*tz)+1/dt;
B4=1000*Rb*(rr+Lr/dt)+1/dt;
B5=550*Rb*(rr+Lr/dt)+450*Rb*Lr*v0/(2*tz)+1/dt;
B6=55*Rb*(rr+Lr/dt)+(45*Rb)*Lr*v0/(2*tz)+1/dt;
B7=6*Rb*(rr+Lr/dt)+(4*Rb)*Lr*v0/(2*tz)+1/dt;
C=-Rb*(rr+Lr/dt)+(2*Rb*Lr+1)*v0/(2*tz);
C1=-Rb*(rr+Lr/dt)+(6*Rb*Lr+1)*v0/(2*tz);
C2=-5*Rb*(rr+Lr/dt)+(55*Rb*Lr+1)*v0/(2*tz);
C3=-50*Rb*(rr+Lr/dt)+(550*Rb*Lr+1)*v0/(2*tz);
C4=-500*Rb*(rr+Lr/dt)+(1000*Rb*Lr+1)*v0/(2*tz);
C5=-500*Rb*(rr+Lr/dt)+(550*Rb*Lr+1)*v0/(2*tz);
C6=-50*Rb*(rr+Lr/dt)+(55*Rb*Lr+1)*v0/(2*tz);
C7=-5*Rb*(rr+Lr/dt)+(6*Rb*Lr+1)*v0/(2*tz);
D=-Rb*Lr*v0/(2*tz);
D1=5*D;
D2=50*D;
D3=500*D;
E=-Rb*(rr+Lr/dt)-(2*Rb*Lr+1)*v0/(2*tz);
E1=-5*Rb*(rr+Lr/dt)-(6*Rb*Lr+1)*v0/(2*tz);
E2=-50*Rb*(rr+Lr/dt)-(55*Rb*Lr+1)*v0/(2*tz);
E3=-500*Rb*(rr+Lr/dt)-(550*Rb*Lr+1)*v0/(2*tz);
E4=-500*Rb*(rr+Lr/dt)-(1000*Rb*Lr+1)*v0/(2*tz);
E5=-50*Rb*(rr+Lr/dt)-(550*Rb*Lr+1)*v0/(2*tz);
E6=-5*Rb*(rr+Lr/dt)-(55*Rb*Lr+1)*v0/(2*tz);
E7=-Rb*(rr+Lr/dt)-(6*Rb*Lr+1)*v0/(2*tz);
T=-wn*Lr*v0/(2*tz);
Y=-wn*(rr+Lr/dt);
W1=-wn*Lr/dt;
P=-Rb*Lr/dt;
Q=(2*Rb*Lr+1)/dt;
Q1=(6*Rb*Lr+1)/dt;
Q2=(55*Rb*Lr+1)/dt;
Q3=(550*Rb*Lr+1)/dt;
Q4=(1000*Rb*Lr+1)/dt;
for n=1:3
A(n+3,n+14)=(-1)^(n+1)*T;
A(n+4,n+14)=(-1)^(n+1)*Y;
A(n+5,n+14)=(-1)^n*T;
A(n+6,n+14)=(-1)^n*T;
A(n+7,n+14)=(-1)^n*Y;
A(n+8,n+14)=(-1)^(n+1)*T;
end;
for n=1:3
A(18,n+14)=1;%hh
end;
A(18,18)=-1;%jgj
for n=1:6
A(n+4,n+4)=B;
A(n+5,n+4)=E;
A(n+3,n+4)=C;
end;
for n=1:7
A(n+2,n+4)=D;
A(n+5,n+3)=-D;
end;
A(1,1)=B4;
A(1,2)=C5;
A(1,3)=D2;
A(2,1)=E4;
A(2,2)=B5;
A(2,3)=C6;
A(2,4)=D1;
A(3,1)=-D3;
A(3,2)=E5;
A(3,3)=B6;
A(3,4)=C7;
A(4,2)=-D2;
A(4,3)=E6;
A(4,4)=B7;
A(5,3)=-D1;
A(5,4)=E7;
A(10,11)=C1;
A(10,12)=D1;
A(11,11)=B1;
A(11,12)=C2;
A(11,13)=D2;
A(12,11)=E1;
A(12,12)=B2;
A(12,13)=C3;
A(12,13)=D3;
A(13,11)=-D1;
A(13,12)=E2;
A(13,13)=B3;
A(13,14)=C4;
A(14,12)=-D2;
A(14,13)=E3;
A(14,14)=B4;
A(15,5)=UA;
A(16,7)=UA;
A(17,9)=UA;
A(15,8)=-UA;
A(16,10)=-UA;
A(17,6)=-UA;
A(15,15)=As;
A(16,17)=Bs;
A(17,16)=Cs;
S=[ Q4*X(1)+P*( 500*X(2)); %1
Q3*X(2)+P*(500*X(1)+50*X(3)); %2
Q2*X(3)+P*(50*X(2)+5*X(4)); %3
Q1*X(4)+P*(5*X(3)+X(5)); %4
W1*X(15)+Q*X(5)+P*(X(4)+X(6)); %5
(-1)*W1*X(16)+Q*X(6)+P*(X(5)+X(7)); %6
W1*X(17)+Q*X(7)+P*(X(6)+X(8)); %7
(-1)*W1*X(15)+Q*X(8)+P*(X(7)+X(9)); %8
W1*X(16)+Q*X(9)+P*(X(8)+X(10)); %9
(-1)*W1*X(17)+Q*X(10)+P*(X(9)+X(11)); %10
Q1*X(11)+P*(X(10)+5*X(12)); %11
Q2*X(12)+P*(5*X(11)+50*X(13)); %12
Q3*X(13)+P*(50*X(12)+500*X(14)); %13
Q4*X(14)+P*500*X(13); %14
UA*(X(5)-X(8))+(LsA/dt)*X(15)+Ua; %15
UA*(X(7)-X(10))+(LsB/dt)*X(17)+Ub; %16
UA*(X(9)-X(6))+(LsC/dt)*X(16)+Uc; %17
0]; %18
%Решение методом Гаусса-Жордана
Z=rref([A S]); %Приведение расширенной матрицы к треугольному виду
X=Z(1:18,19:19); %Выделение последнего столбца из матрицы
Ir=[ 1000*Rb*X(1)-Rb*(500*X(2)); %1
550*Rb*X(2)-Rb*(500*X(1)+50*X(3)); %2
55*Rb*X(3)-Rb*(50*X(2)+5*X(4)); %3
6*Rb*X(4)-Rb*(5*X(3)+X(5)); %4
-wn*X(15)+2*Rb*X(5)-Rb*(X(4)+X(6)); %5
(-1)*(-wn)*X(16)+2*Rb*X(6)-Rb*(X(5)+X(7)); %6
-wn*X(17)+2*Rb*X(7)-Rb*(X(6)+X(8)); %7
(-1)*(-wn)*X(15)+2*Rb*X(8)-Rb*(X(7)+X(9)); %8
-wn*X(16)+2*Rb*X(9)-Rb*(X(8)+X(10)); %9
(-1)*(-wn)*X(17)+2*Rb*X(10)-Rb*(X(9)+X(11)); %10
6*Rb*X(11)-Rb*(X(10)+5*X(12)); %11
55*Rb*X(12)-Rb*(5*X(11)+50*X(13)); %12
550*Rb*X(13)-Rb*(50*X(12)+500*X(14)); %13
1000*Rb*X(14)-Rb*(500*X(13))]; %14
F(1)=X(2)*Ir(1)/(2*tz);
for n=1:12
F(n+1)=(X(n+2)-X(n))*Ir(n+1)/(2*tz);
end;
F(14)=-X(13)*Ir(14)/(2*tz);
v0=v0+(sum(F)/m)*dt;
end;
k=0:K;
subplot(2,1,1);
plot(k*dt,v);
title('Скорость');
xlabel('t,c');
ylabel('v,m/c');
grid on;
subplot(2,1,2);
plot(k*dt,f);
title('');
xlabel('t,c');
ylabel('F,H');
grid on;
%end
Результаты моделирования линейного асинхронного двигателя в режиме прямого пуска с синусоидальными трехфазными напряжениями приведены на рис. 13, 14 и 15.
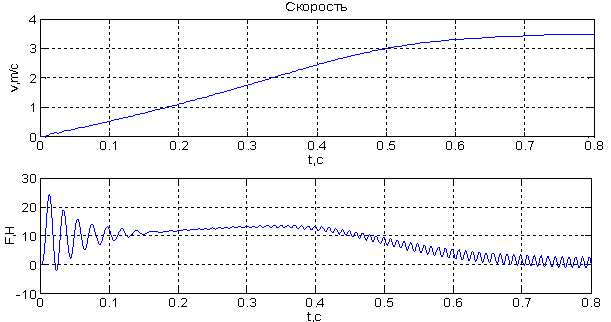
Рис. 13. Результат моделирования линейного асинхронного двигателя в режиме прямого пуска
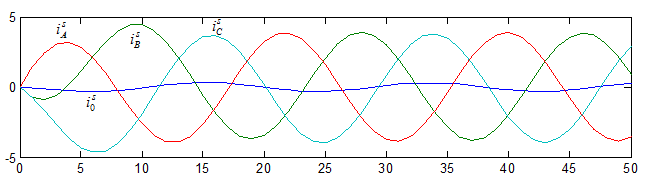 Рис 14. Временные зависимости , , и при питании от синусоидального трехфазного напряжения
Рис 14. Временные зависимости , , и при питании от синусоидального трехфазного напряжения
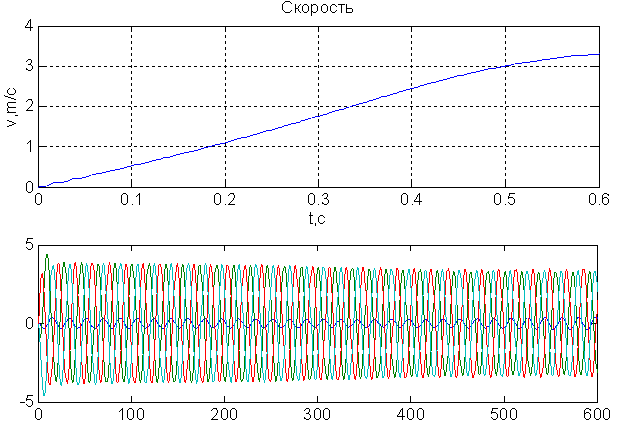
Рис. 15. Временные зависимости , , и при питании от синусоидального трехфазного напряжения
Литература:
1. Емельянов А.А., Кобзев А.В., Козлов А.М., Бесклеткин В.В., Бочкарев Ю.П., Авдеев А.С., Киряков Г.А., Чернов М.В., Габзалилов Э.Ф., Иванин А.Ю. Программирование линейного асинхронного двигателя (Z1 = 6) с трехфазной обмоткой индуктора с нулевым проводом // Молодой ученый. – 2014. - №2. – С. 36-51.
2. Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. — Екатеринбург: УРО РАН, 2000. — 654 с.
3. Емельянов А.А., Медведев А.В., Кобзев А.В., Козлов А.М., Бесклеткин В.В., Бочкарев Ю.П., Авдеев А.С., Чернов М.В., Габзалилов Э.Ф., Киряков Г.А. Моделирование системы АИН ШИМ – линейный асинхронный двигатель (Z1 = 6) с обмоткой индуктора через ярмо // Молодой ученый. – 2013. - №11. – С. 18-28.
