В статье описываются особенности постановки задачи автоматизированного анализа состояния бортовой радиотелеметрической системы космического аппарата. Рассматриваются принципы её решения, основывающиеся на реализации сетевых моделей типа «нейросетей» использующих в качестве структурной составляющей так называемые базовые элементы (модули) [2].
Ключевые слова: телеметрия, бортовая радиотелеметрическая система, модель, мультиграф.
Keywords: Telemetry, airborne radiotelemetry system, model, multigraph.
Бортовая радиотелеметрическая система (БРТС) космического аппарата предназначена для:
- адресного сбора и первичного преобразование информации от систем, приборов, конструкции и агрегатов космического аппарата;
- трансляции ТМ-информации в бортовую радиотехническую систему;
- трансляции ТМ-информации в широкополосную систему связи;
- запись информации на статическое запоминающее устройство(СЗУ);
- «прямое» воспроизведение записанной информации;
- обеспечение наземных испытаний посредством выдачи информации на наземную приёмную станцию;
- предоставление информации по адресному запросу, приём массивов цифровой информации;
- приём массивов цифровой информации от научной аппаратуры.
Структурная схема БРТС представлена на рис.1.
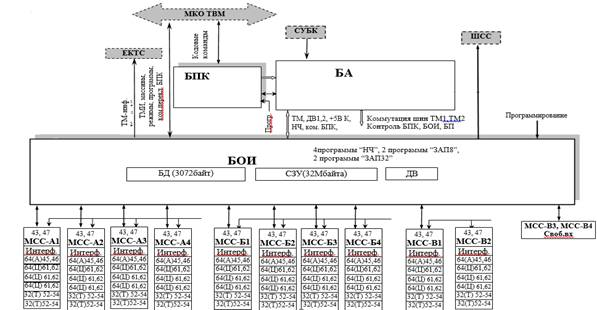
Рис. 1. Структурная схема бортовой радиотелеметрической системы
В состав бортовой радиотелеметрической системы входит:
- Блок обработки информации (БОИ). Он обеспечивает работу в режимах передачи и записи информации, осуществляет подключение до 12 модулей сбора сообщений. Обеспечивает прием команд управления и массивов.
- Блок приема команд (БПК). Обеспечивает прием кодовых команд управления, и преобразование их в прямые команды, выдаваемые на блок автоматики.
- Модуль сбора сообщений (МСС). Предназначен для сбора, обработки и передачи информации с аналоговых датчиков, дискретных датчиков и температурных датчиков в блок обработки информации.
- Блок автоматики (БА). Осуществляет подачу питания на приборы системы, переключение комплектов (основных, резервных) по кодовым командам, поступающих от блока приема команд и блока обработки информации.
На основе рассмотренной структуры БРТС задача автоматизированного анализа может быть сформулирована следующим образом:
для заданной бортовой радиотелеметрической системы
Sбртс= (Ц,О,Р,П,X,T), где:
(Ц) — целевое назначение системы: под i-той целью понимается конкретный результат, определяемый программой полета в требуемом интервале времени;
(О) — операция: под операцией понимается совокупность определенных действий, исполняемых на борту КА, по достижению цели (Ц) в требуемом интервале времени;
(Р) — режим: под режимом понимается конкретный способ действий, исполняемых на борту КА по достижению цели в требуемом интервале времени;
(П) — прибор: под приборами (агрегатами) понимаются технические устройства, реализующие специализированные функции в составе системы.
X — множество параметров.
требуется найти такое значение её состояния
Sбртс = {хi| i=1Yх},где
Yх — число параметров состояния,
хi — параметр состояния.
при котором значение состояния параметра должно соответствовать заданному значению, то есть должно выполнятся условие:

|

0 если хi≠ , где
заданное значение.
при ограничение вида:
[tн, tк] ϵ [tн, tк]заданное, где
tн — время начала анализа;
tк — время конца анализа.
Под состоянием системы Х понимается её свойство характеризующие работоспособность системы на заданном интервале времени.
Состояние системы представляется совокупностью параметров, характеризующих состояния отдельных её элементов
где xi — параметр состояния,
i — Число элементов системы.
Под параметром состояния xi понимается свойство системы, характеризующие одно из его i-x свойств. С точки зрения инженерной реализации системы оценка состояния системы представляется N — кой вида
X= (x1,x2…xn… xN), где
N — число параметров.
Каждый параметр состояния измеряется соответствующими приборами в соответствие с физическими характеристиками процесса, которые он представляет и изменяется в диапазоне изменений, соответствующих характеру процесса.
В таком случае, основываясь на принятых в технологическом цикле оперативного управления основных понятиях и категориях анализа и управления, сетевая модель БРТС может быть представлена следующей иерархической структурой (Рис. 2).
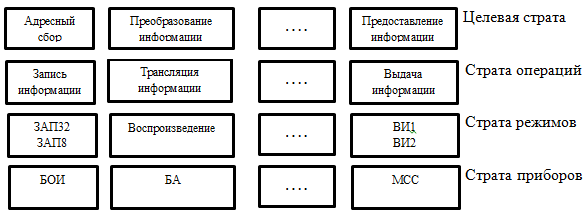
Рис. 2. Структура иерархической модели БРТС
Четырехуровневая структура мультиграфа модели БРТС представлен на рис.3.
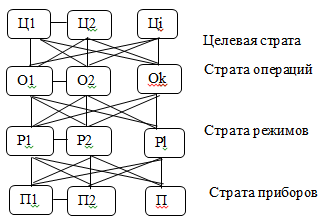
Рис. 3. Общий вид модели БРТС (мультиграф)
Исследуемая система представляет собой совокупность элементов (объектов), находящихся между собой в определенной зависимости и составляющих некоторое единство (целостность), направленное на достижение определенной цели.
Модели базовых элементов (модулей) на каждом уровне, отображающие функциональные свойства этих элементов и адреса связей в системе, представляется таблицей, изображенной на рис.4.
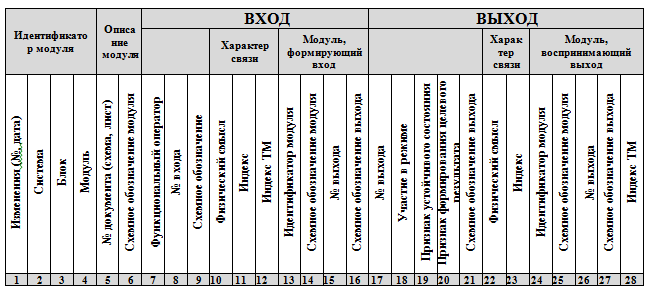
Рис. 4. Табличная форма представления универсального базового элемента
На основание этих элементов на каждом из четырех уровней реализуются соответствующие модели БРТС. Так, например, форма базового уровня целей в формальном представлении при реализации режима воспроизведения будет выглядеть, как показано на рис.5
|
Описание |
Воспроизведение | |
|
Идентификатор |
Р1 | |
|
Уровень |
3 | |
|
Вход |
Связь -1 уровень |
О3–1, О3–2, О3–3, О3–4, О3–5, О3–6. |
|
сдвиг Tначала |
- 00:10:00 | |
|
сдвиг Tконца |
+00:05:00 | |
|
Выход |
Импликация |
S1–1, S1–2, S2–1, S2–2, S3–1, S4–1, |
|
Tначала |
- 00:10:00 | |
|
Tконца |
+00:05:00 | |
Рис. 5. Пример представления базового элемента целевого уровня
Рассмотренный принцип решения задачи анализа состояний бортовой радиотелеметрической системы характеризуется универсальностью по отношению как к различным системам космического аппарата, так и режимам предполагаемых моделей. В том числе и в целевых задачах функционирования космического аппарата.
Литература:
1. Маккаллок, Дж. Логические исчисления идей, относящихся к нервной деятельности / Дж. Маккаллок, У. Питтс. — М.: ИЛ, 1956.
2. Зеленов, Д.А. Нейромодель космического аппарата в задаче оперативного планирования расходования ресурсов бортовых систем./ Д. А. Зеленов. — МЛТИ, 2013.
3. Скорняков, В. А. Некоторые вопросы системного анализа проблемы автоматизированного управления ЛА и разработка методов оперативного планирования команд: дисс. … канд.наук / В. А. Скорняков. — МЛТИ, 1979.
4. Поспелов, Г. С. Программно-целевое планирование и управление / Г. С. Поспелов, В. А. Ириков, — М.: Сов. Радио, 1968.

