Формирование облика навигационной системы для подвижного наземного объекта
Сурков Владимир Олегович, аспирант
Тамбовский государственный технический университет
Рассматривается формирование облика навигационной системы подвижного наземного объекта, предлагается состав системы с описанием его элементов. В качестве алгоритма обработки информации предлагается использование алгоритма обработки информации позволяющего производить идентификацию и адаптивное оценивание совместно с оцениванием дискретно-непрерывных процессов. Предложения были сделаны на основе анализа соответствующих статей в данной области и изучения существующих разработок, применяющихся на данный момент времени в качестве навигационных систем.
Расширение функций, возлагаемых на бортовые системы, а также повышение предъявляемых к ним требований обуславливает чрезвычайно высокую трудоемкость задач, связанных с их разработкой. Многообразие физических принципов, на базе которых реализуются системы, огромное количество возможных вариантов построения и вариантов их совершенствования привело к необходимости формирования облика перспективного бортового оборудования различных типов. Так в [1] рассматривается возможный облик навигационного комплекса для надводных кораблей, его состав, структура, особенности и требования, предъявляемые к навигационным комплексам данного вида. В [2] производится обоснование облика навигационной системы беспилотного летательного аппарата с указанием задач решаемых летательным аппаратом. В [3] рассматриваются общие структуры навигационных систем для различных типов объектов. В [4] описаны предложения по формированию облика навигационной системы (НС) подвижного наземного объекта (ПНО), но без подробного описания части элементов и алгоритма обработки информации. Однако предложения по формированию облика навигационной системы для ПНО в литературе не встречаются. Целью статьи является выработка предложений по формированию облика НС ПНО.
В процессе функционирования НС должна обеспечивать решение следующих основных задач:
‒ преобразование координат;
‒ определение параметров движения объекта;
‒ комплексная обработка информации;
‒ коррекция координат местоположения;
‒ выдача навигационной информации на индикатор и соответствующим потребителям;
Число задач, которые ставятся перед навигационной системой, может изменяться и зависит от типа объекта (летательный аппарат, наземный подвижный объект, морской или космический объект), сферы его применения (военный и гражданский) и соответствующих требований, предъявляемых к навигационной системе.
Облик навигационной системы, например, для подвижного наземного объекта зависит от набора датчиков, которые входят в его состав и от метода обработки полученной информации [5].
НC ПНО строятся по структурной схеме, которая включает:
- Нерадиотехнические измерители (НРТИ).
- Радиотехнические измерители (РТИ).
- Вычислительное устройство.
- Устройство индикации.
В настоящее время распространен следующий минимальный состав НС ПНО:
- Бесплатформенная инерциальная навигационная система (БИНС);
- Приемник СРНС;
- Вычислительное устройство;
- Устройство индикации.
Для увеличения объема получаемой информации предоставляемой потребителю введем дополнительный измеритель в состав навигационной системы. Данным измерителем будет барометрический высотомер, который позволяет не только определять значения высоты, но и обеспечить контроль целостности данных приемника СРНС [6].
Таким образом, в состав перспективной НС будут входить [7] (Рис.1)
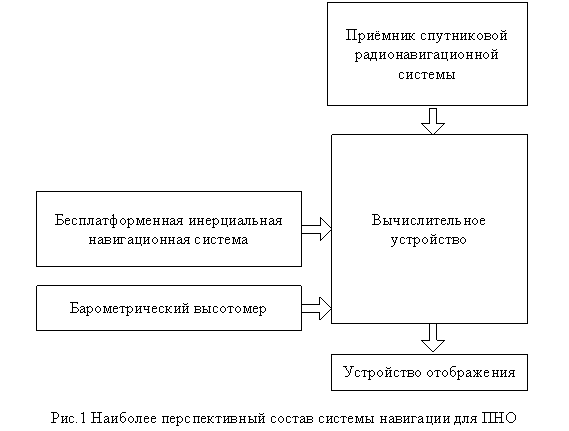
В предлагаемой схеме в качестве основных элементов выступают БИНС и СРНС. БИНС выполняет роль основного НРТИ, позволяющей определить всю необходимую информацию: координаты местоположения, угловую скорость, ускорение, углы ориентации (крен, курс, тангаж).
Приемник СРНС используется как для самостоятельной работы в навигационной системы, так и для коррекции данных от БИНС.
На облик навигационной системы так же влияют применяемые методы обработки информации.
К настоящему времени в навигационных системах применяется комплексирование устройств и систем на уровне вторичной обработки. Под вторичной обработкой информации понимают выполняемую в специализированных вычислителях обработку выходных сигналов измерителей для определения навигационных элементов. Длительное время в радиоэлектронных комплексах для вторичной обработки информации использовались простейшие алгоритмы эвристического происхождения, описанные, например, в [8]. В настоящее время в навигационных системах ПНО широко используются методы оптимальной линейной фильтрации [9–11].
Комплексная вторичная обработка информации дает положительный эффект если соответствующие измерители работоспособны, так как оценить работоспособность соответствующего измерителя возможно лишь при первичной обработке информации.
Первичная обработка информации — это поиск, обнаружение, селекция, преобразование и усиление входных сигналов навигационных измерителей для определения навигационных параметров. Максимального выигрыша при комплексной первичной обработке информации можно достичь, применяя для оптимизации комплексирования измерителей методы марковской теории оптимального оценивания случайных процессов и полей [12,13].
Первичную обработку информации целесообразно использовать применительно к радиотехническим системам. Применение первичной обработки информации позволяет:
‒ производить оценку состояния радиотехнических систем;
‒ создать систему индикации отказов радиотехнических систем;
‒ повысить характеристики точности и помехоустойчивости радиотехнических систем.
Современные системы навигации для ПНО являются в основном комплексными и объединяют в своем составе как радиотехнические, так и нерадиотехнические измерители. Анализ [14] показывает, что роль основной радиотехнической системы для систем навигации играет СРНС. Пропадание сигналов данной системы приводит к значительному росту погрешностей при определении необходимых параметров. В данном случае навигационные системы не могут обеспечить требуемую доступность и целостность данных. Это проиллюстрировано в статье [15], поэтому необходим контроль сигналов СРНС за счет методов первичной обработки информации, который позволит определить факт отсутствия или наличия сигнала на входе приемника СРНС, но не позволит определить достоверность данных от приемника СРНС. При отказе приемника СРНС происходит изменение в работе других измерителей. Например, при отказе приемника СРНС значение составляющей погрешности БИНС, значение которой при исправности БИНС известное и не превышает определенных пределов, может возрастать, что указывает на отказ приемника СРНС. Для определения достоверности данных необходимо контролировать этот параметр, применяя идентификацию и адаптивное оценивание.
Контролируя достоверность данных от приемника СРНС и наличие сигнала на его входе можно получить полную информацию о его состоянии и определить факт его неисправности. Эту информацию в дальнейшем можно использовать для реконфигурации системы навигации. Это позволит реализовать возможность навигационной системы приспосабливаться к изменяющимся условиям окружающей среды и обеспечивать потребителя необходимой навигационной информацией с требуемой доступностью и целостностью. Для этого необходимо синтезировать алгоритм обработки информации, работающий на основе совместного использования методов идентификации и адаптивного оценивания и методов обработки дискретно-непрерывных процессов.
Таким образом, в статье предлагается концепция построения навигационной системы для подвижного наземного объекта и состав системы с описанием его элементов. В качестве алгоритма обработки информации предлагается использование алгоритма обработки информации позволяющего производить идентификацию и адаптивное оценивание совместно с оцениванием дискретно-непрерывных процессов.
Литература:
- Емельянцев, Г. И., Современные требования и облик навигационного комплекса для боевых надводных кораблей начала ХХI века / Г. И. Емельянцев, Э. С. Моисеев, А. Н. Солнцев //Навигация и гидрография. — 1995,№ 1 — С. 37- 42.
- Востриков, О. В. Обоснование облика навигационной системы ударного беспилотного летательного аппарата / О. В. Востриков// «Труды МАИ» — 2011, № 48.
- Ориентация и навигация подвижных объектов: современные информационные технологии/ Под ред. Б. С. Алешина, К. К. Веремеенко, А. И. Черноморского. — М.: ФИЗМАТЛИТ, 2006. — 424 с.
- Сурков В. О. Облик навигационной системы для подвижного наземного объекта и принципы его формирования // Молодой ученый. — 2015. — № 17. — С. 273–276.
- Иванов, А. В. Навигация наземных объектов / А. В. Иванов, Н. А. Иванова. — LAP LAMBERT Academic Publishing, 2013. — 120 с.].
- Иванов, А. В. Комплексные оптимальные алгоритмы обработки информации в навигационных системах подвижных наземных объектов с контролем целостности навигационного обеспечения / А. В. Иванов // Радиотехника. — 2010, № 12.
- 7 Сурков В. О. Точности определения местоположения подвижных наземных объектов в сотовых сетях GSM и UMTS / В. О. Сурков // Молодой ученый. — 2013. — № 6. — С. 147–150.
- Бобнев, М. П. Комплексные системы радиоавтоматики / М. П. Бобнев, Б. Х. Кривицкий, М. С. Ярлыков. — М.: Сов.радио, 1968. — 232 с.
- Браммер, К. Фильтр Калмана–Бьюси / К. Браммер, Г. Зиффлинг. — М.: Наука, 1982
- Медич Дж., С. Статистически оптимальные линейные оценки и управление: пер. с англ. / С. Медич Дж.; под ред. А. С. Шаталова. — М.: Энергия, 1973. — 340 с.,
- Сейдж, Э. П. Теория оценивания и ее применение в связи и управлении: пер. с англ. / Э. П. Сейдж, Дж.Л. Мелса; под ред. Б. Р. Левина. — М.: Связь, 1976. — 496 с
- Ярлыков, М. С. Марковская теория оценивания случайных процессов / М. С. Ярлыков, М. А. Миронов. — М.: Радио и связь, 1993. — 464 с.
- Ярлыков, М. С. Статистическая теория радионавигации / М. С. Ярлыков. — М.: Радио и связь, 1985. — 344 с.
- Сурков В. О. Анализ состава существующих систем навигации для подвижных наземных объектов и выбор наиболее перспективного состава, исходя из требований точности и надежности / В. О. Сурков // Современные тенденции технических наук: материалы II междунар. науч. конф. (г. Уфа, май 2013 г.). — Уфа: Лето, 2013. — С. 20–24.
- Сурков В. О. Системы навигации подвижных наземных объектов и их характеристики/ В. О. Сурков // Молодой ученый. — 2013. — № 7. — С. 76–79.

