Рассматривается концепция построения навигационной системы для подвижного наземного объекта, предлагается состав системыс описанием его элементов. В качестве алгоритма обработки информации предлагается использование алгоритма с возможностью реконфигурации. Предложения были сделаны на основе анализа соответствующих статей в данной области и изучения существующих разработок применяющихся на данный момент времени в качестве навигационных систем.
Введение
Постоянное расширение функций, возлагаемых на бортовые системы, а также повышение предъявляемых к ним требований обуславливает чрезвычайно высокую трудоемкость задач, связанных с их разработкой. Многообразие физических принципов, на базе которых реализуются системы, огромное количество возможных вариантов построения и вариантов их совершенствования привело к необходимости формирования облика перспективного бортового оборудования различных типов. Так в [1] рассматривается возможный облик навигационного комплекса для надводных кораблей, его состав, структура, особенности и требования, предъявляемые к навигационным комплексам данного вида. В [2] производится обоснование облика навигационной системы беспилотного летательного аппарата с указанием задач решаемых летательным аппаратом. В [3] рассматриваются общие структуры навигационных систем для различных типов объектов. Однако предложения по формированию облика навигационной системы для ПНО в литературе не встречаются. Целью статьи является выработка предложений по формированию облика навигационной системы для ПНО.
В процессе функционирования навигационная системадолжна обеспечивать решение следующих основных задач:
- преобразование координат;
- определение параметров движения объекта;
- комплексная обработка информации;
- коррекция координат местоположения;
- выдача навигационной информации на индикатор и соответствующим потребителям;
Работа написана в рамках гранта РФФИ «Теоретические основы построения радиоэлектронных комплексов с реконфигурируемой информационной системой»
Число задач, которые ставятся перед навигационной системой, может изменяться и зависит от типа объекта (летательный аппарат, наземный подвижный объект, морской или космический объект), сферы его применения (военный и гражданский) и соответствующих требований предъявляемых к навигационной системе.
Облик навигационной системы, например, для подвижного наземного объекта зависит от набора датчиков, которые входят в его состав и от метода обработки полученной информации [4].
Навигационные системы ПНО строятся по обобщенной структурной схеме, которая включает:
1. Измерители автономной системы.
2. Радиотехнические системы коррекции.
3. Вычислительное устройство.
4. Устройство индикации.
На начальном этапе развития был широко распространен состав НС, включающий в себя курсовую систему магнитного или гироскопического типа и датчик скорости. Основным недостатком такой компоновки навигационной системы является значительное увеличение погрешностей в определении местоположения с течением времени, поэтому требуется применение радиотехнических систем коррекции (системы сотовой связи, радиотехнические системы дальней навигации (спутниковые радионавигационные системы (СРНС) (ГЛОНАСС/GPS), системы «Чайка» и «LORAN-C»).
В настоящее время распространен следующий минимальный состав навигационных систем для ПНО:
1. Бесплатформенная инерциальная навигационная система (БИНС);
2. Приемник СРНС;
3. Вычислительное устройство;
4. Устройство индикации.
Приведенные выше устройства составляют основу навигационной системы для ПНО и позволяют получить минимальный объем навигационной информации.
Для повышения качества работы системы (точности и достоверности получаемых данных) так же возможен ввод дополнительных датчиков и систем. В качестве дополнительных возможно применение таких датчиков, как барометрический высотомер, который позволяет обеспечить целостность информации СРНС [5], допплеровский измеритель скорости, датчик скорости и т. д. Введение дополнительных датчиков возможно при более жестких требованиях к данным системам.
Так как применение СРНС затруднительно в густо застроенных городских кварталах, карьерах, подземных парковках, то в данных условиях целесообразно применение систем сотовой связи для повышения точности позиционирования. В зависимости от применяемой технологии позиционирования и стандарта сотовой сети возможно получение значений точности от 16 до 50 м [6,7].
Таким образом, в состав навигационной системы будут входить [8] (Рис.1)
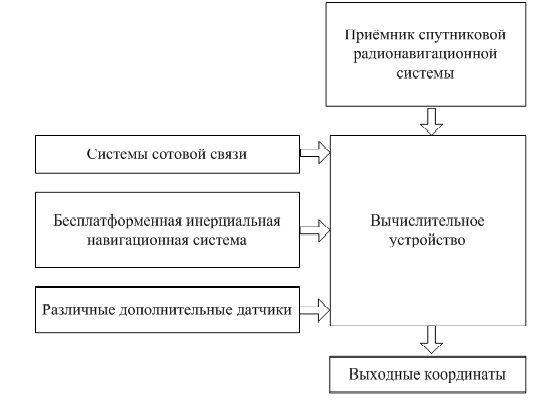
Рис. 1. Наиболее перспективный состав системы навигации для ПНО
В предлагаемой схеме в качестве основных элементов выступают БИНС и СРНС. БИНС выполняет роль основной нерадиотехнической системы, позволяющей определить всю необходимую информацию: координаты местоположения, угловую скорость, ускорение, углы ориентации (крен, курс, тангаж). Одним из недостатков данной системы является увеличение погрешностей в определении местоположения с течением времени.
СРНС используется как для самостоятельной работы в навигационной системы, так и для коррекции данных от БИНС.
Применение систем сотовой связи в комбинации с СРНС не дает значительного уменьшения погрешностей позиционирования в виду того, что значения погрешностей, полученных при применении данных технологий в 10–100 раз больше, чем значения, полученные при применении спутниковых радионавигационных систем. Это проиллюстрировано в статье [9] и приведены соответствующие значения погрешностей при проведении моделирования. Применение систем сотовой связи в навигационных системах целесообразно лишь при пропадании сигналов от СРНС в качестве резервной системы при использовании реконфигурируемых алгоритмов обработки информации в ЭВМ навигационной системы.
На облик навигационной системы так же влияют применяемые методы обработки информации.
К настоящему времени в навигационных системах применяется комплексирование устройств и систем на уровне вторичной обработки. Под вторичной обработкой информации понимают выполняемую в специализированных вычислителях обработку выходных сигналов измерителей для определения навигационных элементов. Длительное время в радиоэлектронных комплексах для вторичной обработки информации использовались простейшие алгоритмы эвристического происхождения, описанные, например, в [10]. В настоящее время в навигационных системах ПНО широко используются методы оптимальной линейной фильтрации [11–13].
Комплексная вторичная обработка информации дает положительный эффект если соответствующие измерители работоспособны, так как оценить работоспособность соответствующего измерителя возможно лишь при первичной обработке информации.
Первичная обработка информации — это поиск, обнаружение, селекция, преобразование и усиление входных сигналов навигационных измерителей для определения навигационных параметров. Максимального выигрыша при комплексной первичной обработке информации можно достичь, применяя для оптимизации комплексирования измерителей методы марковской теории оптимального оценивания случайных процессов и полей [14,15].
Первичную обработку информации целесообразно использовать применительно к радиотехническим системам. Применение первичной обработки информации позволяет:
- производить оценку состояния радиотехнических систем;
- создать систему индикации отказов радиотехнических систем;
- повысить характеристики точности и помехоустойчивости радиотехнических систем.
Современные системы навигации для ПНО являются в основном комплексными и объединяют в своем составе как радиотехнические, так и нерадиотехнические измерители. Анализ [16] показывает, что роль основной радиотехнической системы для систем навигации играет СРНС. Пропадание сигналов данной системы приводит к значительному росту погрешностей при определении необходимых параметров. Это проиллюстрировано в статье [17], поэтому необходимым является контроль сигналов СРНС за счет методов первичной обработки информации.
Современная система навигации должна иметь возможность приспосабливаться к изменяющимся условиям окружающей среды и обеспечивать потребителя необходимой навигационной информацией. Данное требование может быть реализовано за счет использования алгоритмов с возможностью обнаружения отказавших элементов, исключения их из структуры и восстановления работоспособности системы путем реконфигурации.
Таким образом, алгоритм обработки информации, используемый в навигационной системе для ПНО должен заключаться в совместном использовании методов первичной обработки сигналов СРНС и вторичной обработки остальных датчиков и систем входящих в состав системы. Данный алгоритм может стать основой для создания новых типов систем, в том числе и систем с возможностью реконфигурации.
Литература:
1. Емельянцев, Г. И., Современные требования и облик навигационного комплекса для боевых надводных кораблей начала ХХI века / Г. И. Емельянцев, Э. С. Моисеев, А. Н. Солнцев //Навигация и гидрография. — 1995,№ 1 — С. 37- 42.
2. Востриков, О. В. Обоснование облика навигационной системы ударного беспилотного летательного аппарата / О. В. Востриков// «Труды МАИ» — 2011, № 48.
3. Ориентация и навигация подвижных объектов: современные информационные технологии/ Под ред. Б. С. Алешина, К. К. Веремеенко, А. И. Черноморского. — М.: ФИЗМАТЛИТ, 2006. — 424 с.
4. Иванов, А. В. Навигация наземных объектов / А. В. Иванов, Н. А. Иванова. — LAP LAMBERT Academic Publishing, 2013. — 120 с.].
5. Иванов, А. В. Комплексные оптимальные алгоритмы обработки информации в навигационных системах подвижных наземных объектов с контролем целостности навигационного обеспечения / А. В. Иванов // Радиотехника. — 2010, № 12.
6. Сурков В. О. Анализ состава навигационных систем для подвижных наземных объектов и принципов их построения / В. О. Сурков // Технические науки: традиции и инновации: материалы II междунар. науч. конф. (г. Челябинск, октябрь 2013 г.). — Челябинск: Два комсомольца, 2013. — С. 34–37.
7. Иванов, А. В. Определение координат местоположения объекта в сетях GSM и UMTS на основе использования информации о направлении приема сигналов от базовых станций обеспечения / А. В. Иванов, Д. В. Комраков // Радиотехника. — 2013, № 9
8. Сурков В. О. Точности определения местоположения подвижных наземных объектов в сотовых сетях GSM и UMTS / В. О. Сурков // Молодой ученый. — 2013. — № 6. — С. 147–150.
9. Иванов А. В. Совместная обработка информации спутниковых радионавигационных систем и наземных сетевых систем в навигационных системах подвижных наземных объектов / Иванов А. В., Гостев А. В., Семенов А. А., Соколовская Л. В. / Радиотехника. — Москва, № 4, с.16–19.
10. Бобнев, М. П. Комплексные системы радиоавтоматики / М. П. Бобнев, Б. Х. Кривицкий, М. С. Ярлыков. — М.: Сов.радио, 1968. — 232 с.
11. Браммер, К. Фильтр Калмана–Бьюси / К. Браммер, Г. Зиффлинг. — М.: Наука, 1982
12. Медич Дж., С. Статистически оптимальные линейные оценки и управление: пер. с англ. / С. Медич Дж.; под ред. А. С. Шаталова. — М.: Энергия, 1973. — 340 с.,
13. Сейдж, Э. П. Теория оценивания и ее применение в связи и управлении: пер. с англ. / Э. П. Сейдж, Дж.Л. Мелса; под ред. Б. Р. Левина. — М.: Связь, 1976. — 496 с
14. Ярлыков, М. С. Марковская теория оценивания случайных процессов / М. С. Ярлыков, М. А. Миронов. — М.: Радио и связь, 1993. — 464 с.
15. Ярлыков, М. С. Статистическая теория радионавигации / М. С. Ярлыков. — М.: Радио и связь, 1985. — 344 с.
16. Сурков В. О. Анализ состава существующих систем навигации для подвижных наземных объектов и выбор наиболее перспективного состава, исходя из требований точности и надежности / В. О. Сурков // Современные тенденции технических наук: материалы II междунар. науч. конф. (г. Уфа, май 2013 г.). — Уфа: Лето, 2013. — С. 20–24.
17. Сурков В. О. Системы навигации подвижных наземных объектов и их характеристики/ В. О. Сурков // Молодой ученый. — 2013. — № 7. — С. 76–79.

