Целью исследования является предложение устройства автоматической кормушки для домашних животных с возможностью дистанционного управления. Актуальность исследования обусловлена тем, что существующие технические устройства не имеют возможности удаленного мониторинга и управления. Решением данной проблемы является разработка устройства управления на основе микроконтроллера, шнека с шаговым мотором, весов, модуля часов реального времени и GSM-модуля для организации информационного обмена с использованием мобильной связи.
Ключевые слова: GSM-модуль, автоматическое кормление домашних животных, бункерный контейнер кормушки, часы реального времени, микроконтроллер с архитектурой AVR.
Актуальность исследования обусловлена тем, что во многих существующих аналогах устройств кормушек с автоматическим кормлением нет возможности удаленного оповещения хозяина о том, что количество корма в бункерном контейнере минимально. Кроме того, возможность удаленного контроля устройством может позволить оперативно переназначить время кормления.
Предлагаемое устройство должно реализовывать следующие функции:
- Автоматическое кормление домашнего животного в заданные пользователем моменты времени (или же по таймеру, например, каждые 6 часов).
- Возможность регулирования порций кормления.
- Удаленное управление с использованием мобильной связи.
- Контроль остатка корма в бункерном контейнере и сигнализация при достижении предельно низкой массы.
Структурная схема предлагаемого устройства, удовлетворяющего обозначенным техническим и функциональным характеристикам, представлена на рис. 1.
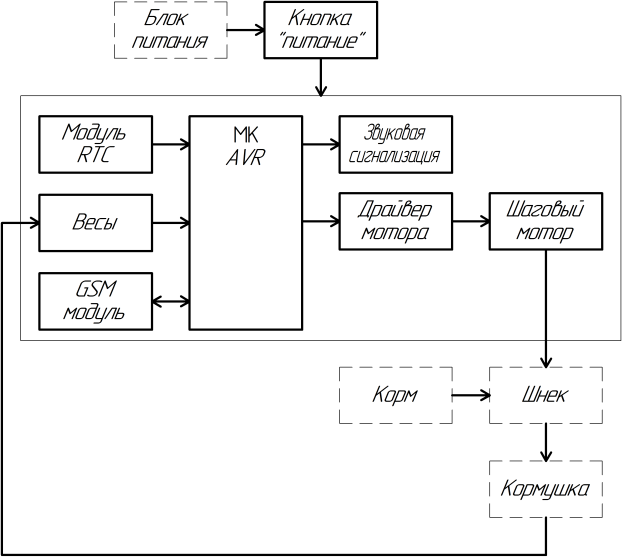
Рис. 1. Структурная схема устройства автоматической кормушки для домашних животных
Основу работы устройства составляет микроконтроллер с архитектурой AVR , например, Atmega 8. [1], выбор которого обусловлен его распространённостью, относительной дешевизной и высокой функциональностью в сравнении с другими микроконтроллерами с архитектурой данного типа.
Принцип действия предлагаемого устройства аналогичен подобным техническим решениям. Он заключается в порционной подаче корма в бункерный контейнер кормушки с применением шнека. Скорость подачи корма должна быть не высокой и поддерживаться на заданном уровне, чтобы избежать измельчения корма (например, многие лечебные корма для зубов домашнего питомца могут утратить свою эффективность при его измельчении). Поэтому, как правило, для приведения шнека в движение используется шаговый мотор, предоставляющий высокие возможности по управлению и регулированию скорости за счет точности позиционирования вала шагового мотора.
Для управления шаговым мотором необходимо использование драйвера мотора для обеспечения требуемой нагрузочной способности, поскольку подавляющее большинство микроконтроллеров не способны напрямую управлять моторами, в том числе и шаговыми.
Для обеспечения требования 1) необходимо использование часов реального времени. В микропроцессорных системах для решения данной задачи используются модули RTC . Микроконтроллер при этом будет периодически опрашивать часы реального времени для проверки наступления времени очередного кормления.
Возможность регулирования порций кормления достигается за счет реализации в алгоритмах микроконтроллера нескольких скоростных режимов вращения шагового двигателя. В зависимости от скорости подачи корма при постоянстве времени кормления будет достигаться регулирование порций корма.
Для обеспечения требования 3) необходимо использование модуля удаленного информационного обмена [2]. Для этих целей может использоваться GSM -модуль, предназначенный для предоставления возможности некоторой микропроцессорной системе поддерживать информационный обмен с использованием сотовой связи, в результате чего устройства автоматической кормушки будет обладать наибольшей практичностью использования.
Контроль остатка корма в бункерном контейнере кормушки может быть выполнен с использованием весов, представляющих собой комплексный электромеханический механизм. За счет отклонения составных частей модуля весов формируется разница электрических сигналов, регистрируемая модулем АЦП весов и передаваемая в цифровом виде в микроконтроллер. Предварительная настройка минимального регистрируемого веса может быть выполнена также с использованием мобильной связи (то есть, учет веса самого бункерного контейнера кормушки без корма). При достижении минимально возможного веса корма в контейнере (или предварительного веса для сохранения запаса корма как минимум на 3–4 часа) будет передано соответствующее сообщение хозяину питомца по мобильной связи и включится на некоторое время звуковая сигнализация (например, если хозяин в данный момент дома).
В качестве источника питающего напряжения используется внешний блок питания. Включение устройства производится путём подачи питающего напряжения при нажатии кнопки «питание» с фиксацией.
Таким образом, было предложено устройство автоматической кормушки для домашних животных, представленное соответствующей структурной схемой, отражающей основные структурные узлы.
Литература:
- Кэмерон Н. Электронные проекты на основе EPS8266 и EPS32. Создание приложений и устройств с поддержкой Wi-Fi. — М.: изд. «ДМК Пресс», 2022. — 454 с.
- Таненбаум Э., Уэзеролл Д. Беспроводные сети. 5-е изд. — М.: Техносфера, 2016. — 323 с: ил.

