На производственных предприятиях нередко появляется вопрос по способу дозированию сыпучего продукта. Такие устройства называются дозаторы, а основной частью является вибрационный питатель.
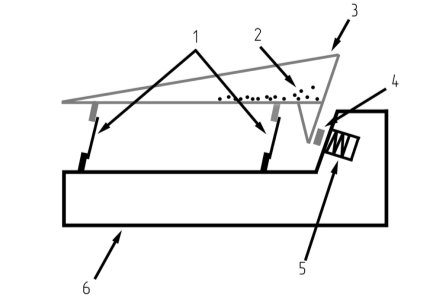
Рис. 1. Вибрационный дозатор
Вибрационный питатель (Рис. 1) — это установка, состоящая из:
- Рессоры. Выполнены, как правило, из текстолита для создания упругости. Благодаря им происходит возвращение лотка в исходное положение.
- Сыпучий продукт
- Лоток для сыпучего продукта, выполнен в форме ковша.
- Якорь. Выполнен из магнитного материала.
- Катушка вибровозбудителя.
- Основание установки. Массивная станина как правило отлитая из чугуна.
Принцип работы основывается на воздействии переменного магнитного поля и преобразовании его в возвратно-поступательные движения. Ток, протекающий через катушку вибровозбудителя создает переменное магнитное поле, которое воздействует на якорь. Якорь закреплен на лотке неподвижно. Колебания якоря передаются на лоток. Ось якоря и лоток расположены под небольшим углом относительно плоскости станины, это обеспечивает оптимальное движение продукта по лотку.
Регулирование скорости подачи продукта происходит путем регулирования силы тока, протекающего через катушку вибровозбудителя. Увеличение силы тока влечет за собой увеличение электромагнитного поля на якорь, а уменьшение силы тока — уменьшение электромагнитного поля и как следствие уменьшение амплитуды колебаний лотка.
Изменение силы тока при помощи регулятора мощности построенного на базе тиристора или симметрично направленного тиристора (симистора) в стандартной схеме регулятора мощности, не позволяет достичь плавности и влечет за собой резкое изменение силы тока. Для производств, плавность работы вибрационного питателя необходима. Специализированные компании выпускают блоки управления вибрационным питателем на основе микроконтроллеров и симисторов. Стоимость таких блоков неоправданно высока, и они не отличаются надёжностью и долговечностью. На пищевом предприятии, где я работаю было решено разработать и внедрить в производство аналогичный блок. Отличительной особенностью этого блока является наличие упрощенного детектора нуля и отдельных блоков для простоты их замены в случае выхода из строя.
В разработанном блоке (Рис. 2) используется импульсное управление. Сетевое напряжение подключено на клемму «P1» и через сопротивление R1 номиналом 100 кОм протекает ток на оптопару со встречно направленными диодами.
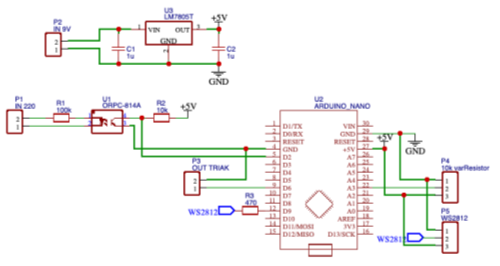
Рис. 2. Схема электрическая принципиальная
Резистор R1 нужен для ограничения тока питания светодиодов в оптопаре. 3 нога опопары подключена к «земле», а 4-я нога — к цифровому порту микроконтроллера «D2» и через подтягивающий резистор R2 номиналом в 10 кОм к питанию +5 Вольт. Это сделано для того, чтобы на порту микроконтроллера была всегда логическая единица когда переменный ток на входе оптопары не пересекает нуль. В схема используется цифровой светодиод модели WS2812 для индикации режимов работы блока. В роли управления служит переменный резистор многооборотный на 10 кОм.
Устройством коммутирования нагрузки в данном блоке выбрано «Твердотельное Реле». Это обусловлено простотой в замене и дополнительной гальванической развязкой с сетью. На Твердотельное Реле (далее — ТТР), подается управляющее напряжение +5 вольт с микроконтроллера в промежуток времени t2 и происходит включении нагрузки в любой период времени. Отключение реле происходит только тогда, когда нагрузка на нем отключена. Это происходит, когда ток протекает через ноль (Рис. 3).
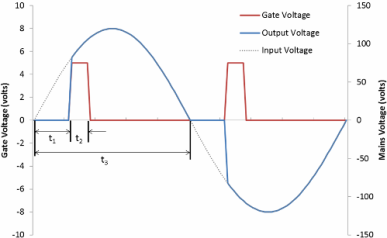
Рис. 3. Осциллограмма работы симистора
В ТТР есть встроенный детектор нуля и оно всегда закрывается, когда ток протекает через ноль при условии, что на входе нет управляющего напряжения (Gate Voltage). В блоке имеется отдельный детектор нуля для синхронизации импульсов управления вибропитателем.
В момент детектирования нуля, микроконтроллер подает напряжение на ТТР и через промежуток времени, который задается функцией зависимости напряжения на Аналоговом Порту «A3» микроконтроллера — отключает его. Тем самым происходит регулирование длительности импульсов, подаваемых на ТТР.
Путем регулирования задатчика в виде потенциометра происходит уменьшение или увеличение интервала t2 и как следствие изменение в амплитуде колебаний лотка вибропитателя. Для каждого вибропитателя в отдельности стоит производить механическое регулирование расстояния между сердечником и катушкой для достижения необходимого максимального уровня вибрации.
Отличительными особенностями данного устройства от тех, что реализуются на территории РФ, является:
- Бюджетность,
- Надежность,
- Простота.
Выводы: в результате проделанной работы были изучены материалы по принципу работы вибрационных питателей с электромагнитной катушкой и разработан блок управления вибропитателем, который по плавности и точности регулирования превосходит российские аналоги. Произведено внедрение на несколько производств.
Литература:
- Расчет и конструирование вибрационных питателей. В. А. Повидайло, М.-К.: Машгиз, 1962., 151 с.
- Евсеев Ю. А., Крылов С. С. Симисторы и их применение в бытовой электроаппаратуре. — Москва, Издательство Энергоатомиздат, 1990. — 120с: ил. ISBN 5–283–005534
- Datasheet на микроконтроллер ATmega328.
- Весовое дозирование зернистых материалов / С. В. Першина, А. В. Каталымов, В. Г. Однолько, В. Ф. Першин. — М.: Машиностроение, 2009. — 260 с.

