Проектирование систем определения направления на источник звука представляет собой актуальную задачу, направленную на повышение возможностей систем безопасности, робототехники, биоакустики и интеллектуального видеонаблюдения [1]. Современные исследования подтверждают, что традиционные методы визуального наблюдения обладают существенным недостатком — зависимостью от условий освещенности и прозрачности среды. В отличие от них, пассивные акустические системы, основанные на анализе сигналов от массива микрофонов, позволяют обнаруживать и классифицировать объекты по их акустическим сигнатурам в любое время суток и в сложных метеоусловиях [2]. Актуальность разработки заключается в создании автономного устройства, способного в реальном времени анализировать акустическую обстановку, определять направление на наиболее мощный источник звука и обеспечивать возможность дистанционного контроля.
Устройство определения направления на источник звука является прибором, решающим задачу пассивной пространственной локации по акустическому признаку. Целью настоящего исследования является проектирование программируемого микроконтроллерного устройства, обеспечивающего автоматическое сканирование заданного сектора, сравнение уровней сигнала на входах и позиционирование поворотного механизма в направлении предполагаемого источника. Актуальность исследования обусловлена тем, что существующие коммерческие решения часто представляют собой сложные и дорогостоящие стационарные системы либо не обладают необходимой мобильностью и простотой интеграции. Одним из эффективных решений обозначенной проблемы является проектирование компактного устройства на основе доступной микроконтроллерной платформы.
Предлагаемое устройство должно реализовывать следующие функции:
- определение направления на источник звука в режиме секторного сканирования путем пошагового поворота сервомотора и анализа данных с микрофонных модулей;
- автоматический поиск и фиксация угла, соответствующего направлению с максимальным уровнем звукового сигнала, на основании алгоритма сравнения амплитуд;
- передачу результатов измерений (текущий угол, уровень сигнала) на смартфон или систему верхнего уровня по беспроводному интерфейсу Bluetooth по запросу;
- питание всех компонентов системы от сетевого напряжения переменного тока 230 В.
Структурная схема предлагаемого устройства, удовлетворяющего обозначенным функциональным требованиям, представлена на рис. 1. Центральным управляющим элементом системы является микроконтроллер [3], который координирует работу всех периферийных модулей и реализует алгоритм локации.
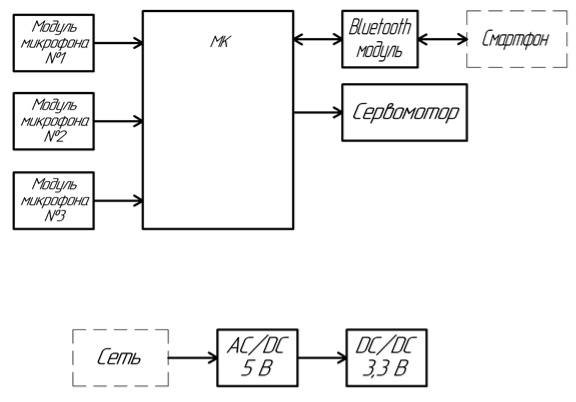
Рис. 1. Структурная схема устройства определения направления на источник звука
Акустический блок состоит из трех идентичных микрофонных модулей (Модуль микрофона № 1, № 2, № 3), закрепленных на неподвижной платформе в определенной геометрической конфигурации (например, линейной или треугольной). Каждый модуль включает в себя электретный микрофон, усилитель и АЦП, и подключен к отдельному аналоговому или цифровому входу микроконтроллера. Синхронное или квазисинхронное измерение уровня сигнала с трех точек позволяет оценить разность амплитуд и, соответственно, определить сторону, с которой приходит звуковая волна.
Исполнительный блок представлен сервомотором, на валу которого закреплена поворотная платформа с акустическим блоком. Микроконтроллер формирует ШИМ-сигнал для управления углом поворота сервопривода, реализуя алгоритм секторного сканирования: последовательное позиционирование в ряд дискретных точек и опрос микрофонов в каждой из них.
Блок связи и интерфейсов включает в себя Bluetooth-модуль, подключенный к микроконтроллеру через последовательный интерфейс UART [4]. Модуль работает в режиме подчиненного устройства, ожидая запроса от главного устройства (смартфона). По получению команды, микроконтроллер передает пакет данных, содержащий текущий угол поворота и массив значений уровней сигнала.
Цепь питания устройства представляет собой совокупность преобразователей. Сетевой AC/DC преобразователь формирует из напряжения 230 В постоянное стабилизированное напряжение +5 В, необходимое для питания микроконтроллера, сервомотора и микрофонных модулей. Далее, DC/DC преобразователь (линейный стабилизатор или импульсный понижающий преобразователь) понижает напряжение +5 В до +3.3 В для питания низковольтного Bluetooth-модуля.
Таким образом, предложена структура устройства пассивного акустического определения направления, представленная соответствующей структурной схемой, на которой отражены ключевые функциональные модули и интерфейсы взаимодействия. Разработанное устройство позволяет автоматически сканировать пространство, локализовывать направление на наиболее активный источник звука и предоставлять данные для внешнего мониторинга, что способствует расширению функциональных возможностей систем автоматики, безопасности и роботизированных комплексов, работающих в условиях акустически значимой окружающей среды.
Литература:
- Безопасность технологических процессов и оборудования: учебное пособие для вузов / Э. М. Люманов, Г. Ш. Ниметулаева, М. Ф. Добролюбова, М. С. Джиляджи. — 3-е изд., стер. — Санкт-Петербург: Лань, 2025. — 224 с.
- Лобов, Д. Г. Системы автоматического регулирования: учебное пособие / Д. Г. Лобов, Е. А. Гонтовой, Д. Б. Пономарев. — Омск: ОмГТУ, 2023. — 120 с.
- Мартин Т. Микроконтроллеры Atmega. Семейство микроконтроллеров AVR. Вводный курс. — М.: изд. Додэка-XXI, 2010. — 296 с.
- Калачев, А. В. Основы работы с технологией Bluetooth Low Energy / А. В. Калачев, М. В. Лапин, М. Е. Пелихов. — 2-е изд., стер. — Санкт-Петербург: Лань, 2022. — 224 с.