Автономные мобильные устройства, способные формировать карты окружающего пространства, находят широкое применение в самых разных сферах — от промышленной автоматизации и логистики до научных исследований и бытовой робототехники. Построение карты помещения в режиме реального времени требует комплексного сочетания различных технических средств: высокоточных датчиков расстояния, инерциальных навигационных систем, энергоэффективных приводов, надежных средств хранения данных и производительных вычислительных модулей.
Многие коммерческие решения на рынке оказываются либо избыточными по функциональности и стоимости, либо недостаточно гибкими для специфических задач. В таких условиях особую ценность представляет компактная аппаратно-программная платформа, оптимизированная по энергопотреблению, габаритам и набору возможностей.
Отличительной чертой рассматриваемого устройства является возможность не просто фиксировать данные, но и выполнять их первичную обработку в реальном времени — синхронизируя измерения дальномеров с информацией о перемещении и ориентации. Это требует точной согласованности всех подсистем: измерительных, управляющих, приводных и запоминающих.
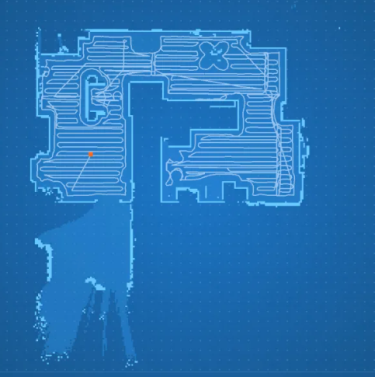
Рис. 1. Пример карты, построенной устройством-аналогом
Структура устройства базируется на модулях. Каждый модуль выполняет определённую задачу, а взаимодействие между ними обеспечивается через унифицированные интерфейсы передачи данных.
Блок управления выполняет координацию работы всех модулей устройства, а также отвечает за согласованное выполнение процессов измерения, обработки и сохранения данных.
Для получения точных измерений на больших дистанциях используется лидар, функционирующий по принципу лазерного дальнометрирования. Благодаря узконаправленному лучу и высокой чувствительности приемной части он обеспечивает минимальную погрешность.
В ближнем диапазоне применяется ультразвуковой датчик. На небольших расстояниях лазерные системы могут давать искажённые данные из-за помех или сложных отражающих поверхностей, поэтому ультразвук оказывается более надёжным на дистанциях до 2 метров.
Для расширения и уточнения картографической информации используется модуль технического зрения. Он позволяет анализировать форму объектов, а также их текстурные особенности, дополняя данные дальномеров.
IMU-модуль необходим для определения положения и ориентации устройства в пространстве во время перемещения. Без этих данных невозможно корректно объединить результаты измерений в целостную карту. В состав модуля входят акселерометр, гироскоп и магнитометр.
SD-модуль предназначен для сохранения данных, поступающих от всех датчиков и IMU, с целью их дальнейшего анализа.
Автономность работы устройства обеспечивается собственной энергосистемой. Аккумулятор должен обладать достаточной ёмкостью для функционирования устройства не менее одного часа, а также включать защиту от перезаряда, глубокого разряда и короткого замыкания.
Для контролируемого перемещение устройства наилучшим вариантом являются двигатели постоянного тока с редукторами, которые снижают скорость вращения и увеличивают крутящий момент. Управление приводами осуществляется через драйвер электродвигателей.
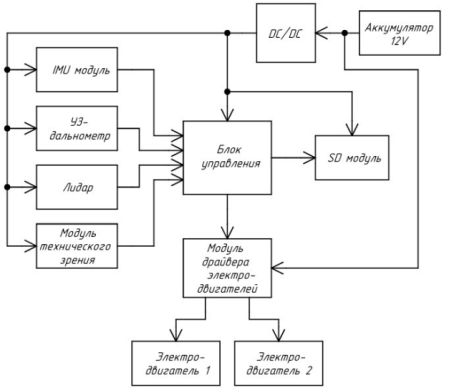
Рис. 2. Структурная схема устройства
Представленная структурная схема устройства демонстрирует возможность эффективного построения карты помещения на основе объединения данных дальномеров, технического зрения и инерциальной навигации. Согласованная работа всех модулей — от системы измерений и вычислительного блока до приводов и энергосистемы — обеспечивает точное получение пространственной информации и её надёжное сохранение для последующей обработки.
Модульная архитектура платформы и автономность её работы делают устройство практичным инструментом для дальнейших испытаний, экспериментов и адаптации под различные прикладные задачи. Предложенный подход может служить основой для создания более сложных навигационных и картографических систем.
Литература:
1. Дьяконов В. П. Микроконтроллеры и микропроцессоры. Архитектура, программирование, интерфейсы. — СПб.: Питер, 2021. — 560 с.
2. Алексеев А. Б. Сенсорные устройства: ультразвук, инерциальные модули, лидары. — М.: Солон-Пресс, 2020. — 288 с.