В статье рассматривается разработка алгоритмов Indoor-навигации для мобильного робота на основе стационарных ультразвуковых маячков внутри помещения, с различными видами поперечных сечений.
Ключевые слова: Indoor-навигация, мобильный робот, ультразвуковой маячок.
Традиционные спутниковые навигационные системы не могут обеспечить достаточно точными данными о местонахождении объекта внутри помещения. Причиной того является конструктивные особенности помещения такие как бетонные стены, металлоконструкции. По этой причине исследования Indoor навигации на основе стационарных устройств с высокой точностью является актуальным.
Авторами неоднократно изучены возможности повышения точности определения местонахождение объекта с использованием различных инструментов [1]. Также исследования [2–3] с использованием технологий GSM и WiFi показали недостаточно высокие уровни повышения точности относительно спутниковых навигационных систем.
Мобильный робот оснащен радиопередатчиком который будет сопряжен с двумя стационарными ультразвуковыми маячками. Маячки устанавливаются в стенах или вне помещения в зависимости от оптимальности покрытия всей площади. В память робота заранее записываются параметры помещения в виде массивов состоящих из расстоянии фрагментов стен по осям и углов между ними.
Движения мобильного робота рассматривается только в гладкой плоскости пола. Аппаратным алгоритмом подразумевается программный код записанный в память робота.
Точка А местонахождения объекта определяется с помощью теорем Пифагора и синусов довольно просто в виде координат по осям x и y , поскольку благодаря маячкам будут известны расстояния образующие треугольник от робота до двух маячков и между маячками и внутренние углы треугольника a, b, g (Рис. 1).
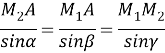
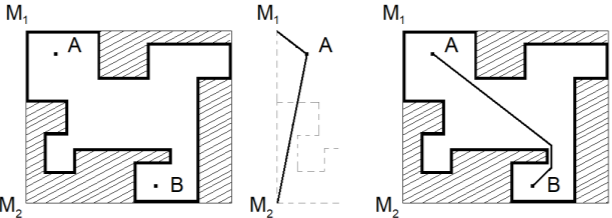
Рис. 1. Определения точки А местонахождения и построения траектории
На основе определенных координат точки А и заранее заданным координатам точки В строится прямоугольник, диагональ которого является самой короткой траекторией между точек А и В. Движения по отрезку АВ возможно только в случае, если поперечное сечение помещения является выпуклым многоугольником. В ином случае, после определения координат точки А аппаратный алгоритм производит расчет траекторий с наименьшим расстоянием. При этом учитываются препятствия наложенные поперечным сечением помещения, путем разделения всей площади на конечные квадраты с определенным шагом длины сторон. Специальный алгоритм отвечает за величину шагов и определяет оптимальную длину шага, при этом учитывает все особенности наложенных препятствий.
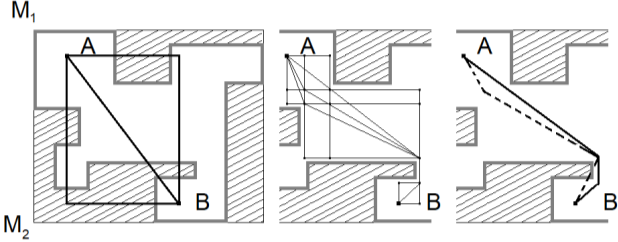
Рис. 2. Алгоритм обхода препятствий по траектории
Как видно из Рис. 2 строятся многочисленные возможные траекторий от точки А до точки В, которые проходят через стороны или диагоналей этих конечных квадратов. Аппаратный алгоритм выбирает траекторию наименьшим расстоянием.
В случае если поперечное сечение помещения имеет нестандартные кривые, то сначала аппаратным алгоритм обновляет массив данного участка путем сглаживания также с помощью конечных квадратов (Рис. 3). Вместо кривого участка берется участок с ломанными линиями, где угол положения последних равны 90°.
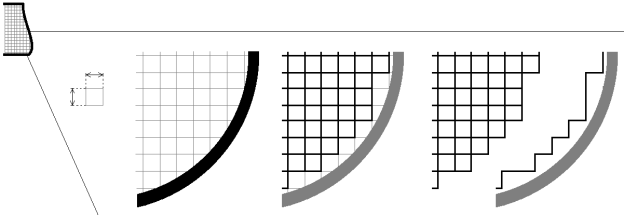
Рис. 3. Процесс сглаживания кривых участков
Результаты
В результате выполнения данной работы получены три основных алгоритмов и записаны в память робота в виде аппаратных алгоритмов.
Первый алгоритм проверяет местонахождения точки А внутри помещения, если оно заранее задано. Если по заданным координатам точка А находится вне помещения, то робот извещает специальным звуковым сигналом. А если координаты точки А не задано, то алгоритм определяет самостоятельно.
Второй алгоритм определяет траекторию от точки А до точки В с наименьшим расстоянием и сглаживает нестандартные участки поперечнего сечения помещения.
Третий алгоритм изменяет длину стороны конечных квадратов и определяет оптимальные условия для наибольшей точности.
Литература:
1. Извозчикова В. В., Ковалевский А. В., Меженин А. В. Построение систем внутренней навигации. — M.: Межд. науч.-практ. конф. «Вопросы образования и науки», 2015. С. 74–75.
2. Комраков Д. В., Технологии позиционирования наземных подвижных объектов в сетях GSM. — М.: Буки-Веди, 2012. С. 166.
3. Пролетарский А. В., Баскаков И. В., Чирков Д. Н., Использование беспроводных сетей WiFi в навигации. — М.: БИНОМ, 2010. С. 178.

