УДК 623.746.-519; 623.646
Приборы для автономной системы навигации и ориентирования беспилотных летательных аппаратов
Шведов Павел Евгеньевич, магистрант
Высшая школа системного инжиниринга Московского физико-технического института
Темник Яков Александрович, магистрант
Высшая школа системного инжиниринга Московского физико-технического института
Исламов Вадим Кадимович, доктор технических наук, научный руководитель
Главный научно-исследовательский испытательный центр робототехники
Министерства обороны Российской Федерации (г. Москва)
Хаметов Рустам Саидович, заместитель директора по развитию
АО «Конструкторское Бюро Градиент ++» (г. Таганрог)
Статья содержит результаты обзора информационных и научно-технических материалов о современных оптико-электронных приборах. Определены принципы построения и методы функционирования нескольких типов приборов, которые могут входить в комплект автономной системы навигации и ориентирования беспилотных летательных аппаратов для обеспечения полётов в сложных (городских) условиях. Дано краткое описание характеристик и принципов функционирования сканеров и камер, которые могут обеспечить автономную навигацию и ориентирование воздушных машин-роботов различного назначения и класса.
Ключевые слова: беспилотный летательный аппарат (БЛА), автономная система навигации и ориентирования (АСНО), оптико-электронная система, лидар. картографирование.
Применение беспилотных летательных аппаратов (БЛА) в различных сферах деятельности человека получает всё большее распространение. Современные системы управления обеспечивают функционирование БЛА в режиме взлета/посадки и крейсерского полёта по маршрутным точкам. Миниатюризация радиоэлектронного оборудования, увеличение скорости и манёвренности БЛА при совершении полётов на малых и сверхмалых высотах, а также необходимость применения БЛА в городах ставит задачи разработки и создания систем навигации и ориентирования, обеспечивающих автономное функционирование и маневрирование средне- и малоразмерных воздушных роботов при полётах в условиях естественных и искусственных помех, в частности, в крупных городах с плотной и высотной застройкой.
В настоящее время, для обеспечения полётов БЛА – навигации (определения положения аппарата относительно курсовых точек в глобальной системе координат) и ориентирования (определения положения окружающих объектов и вектора перемещения аппарата в локальной системе координат) – предусматривается применение средств спутниковой навигации, сопряжённых с системами позиционирования GPS (США) и ГЛОНАСС (Россия). Для решения задач точного позиционирования и совершения автономных полётов воздушных роботов в сложных (городских) условиях целесообразно применять бортовые оптико-электронные комплексы навигации и ориентирования [1, 2].
Известно, что к БЛА различного вида и класса, целевого назначения и конструктивного исполнения предъявляются свои специфические требования. Наиболее сложными процессами являются выработка и реализация требований к системам управления полётом малогабаритных и миниатюрных аппаратов. Особую значимость приобретают исследовательские, опытно-конструкторские и инженерные разработки по созданию автономных систем навигации и ориентирования, обеспечивающих функционирование систем программного управления воздушных машин-роботов военного назначения.
Автономная система навигации и ориентирования (АСНО) разведывательных летающих роботов должна обеспечивать полёт по заранее определенной программе (полётному заданию), подлёт в назначенный район (зону, точку), совершение барражирования и маневрирования на заданных высотах, просмотр подстилающей поверхности, возвращаемый полёт и посадку в определённом районе (месте). Сегодня крупногабаритные и малоразмерные разведывательные БЛА используются в основном для картографирования, построения 3D карт местности и моделей наземных объектов, для разведки территорий и акваторий, отслеживания обстановки в окружающем пространстве, поиска, обнаружения и идентификации сил и средств вероятного/реального противника.
АСНО транспортных БЛА – как правило, тяжёлых и крупноразмерных беспилотных самолётов и вертолётов – должна обеспечивать совершение взлёта/посадки с подготовленных и неподготовленных площадок, безаварийное следование по предварительно составленному воздушному маршруту, определение мест доставки грузов, а также реагирование на изменение текущей воздушной и наземной обстановки.
Аналогичные требования должны предъявляться к АСНО для ударных БЛА многократного и одноразового применения. Дополнительными будут требования обеспечения следующих функций: выход летательного аппарата к назначенному объекту, целеуказание (выбор целей для нанесения ударов бортовым оружием), атака цели с наведением средств поражения на выбранные цели или атака цели одноразовым боевым летательным аппаратом с зарядом на борту), в условиях естественных и искусственных помех.
Главное требование к современным боевым БЛА – совершение полётов и обеспечение надёжного функционирования в условиях естественных и искусственных помех, включая городские высотные здания и противодействие противника радиоэлектронными средствами. Общие требования к приборному составу АСНО беспилотных комплексов можно сформулировать следующим образом: обеспечивать управляемый полёт и автономное функционирование летательных аппаратов в любое время года и суток, реализовывать обнаружение и идентификацию объектов в окружающем пространстве и на подстилающей поверхности, обеспечивать эффективное (безаварийное) преодоление возникающих препятствий и изменений условий полёта.
Анализ состава и схем построения АСНО для БЛА различного назначения и класса показал, что конструктивно-техническую основу их составляют оптико-электронные системы, которые могут быть представлены несколькими типами приборов с различными принципами формирования характеристик окружающей навигационной обстановки, изображений и образов объектов:
- лазерный 2D и 3D сканер (LIDAR – Light Identification Detection and Ranging – обнаружение, идентификация и определение дальности с помощью света);
- 3D камеры со структурированной подсветкой;
- стереофотограмметрические камеры;
- одометрические монокулярные системы навигации и картографирования;
- интеллектуальные системы распознавания образов на базе алгоритмов машинного обучения (ML – Machine Learning).
Для обеспечения работы приборов АСНО и программного управления полётом БЛА в различных условиях, в том числе в городской среде необходимо предварительно осуществлять сбор и предварительный анализ информации об ориентирах, контрольных навигационных точках и структуре фона подстилающей поверхности. Информация загружается в бортовой компьютер на этапе подготовки аппарата к вылету. В информационный блок для обеспечения полёта БЛА могут входить следующие компоненты [3]:
- цифровые модели рельефа (DTM – Digital Terrain Model) на основе спутникового дистанционного зондирования районов, участков Земли;
- цифровые модели поверхности (DSM – Digital Surface Model) высокого разрешения на основе лазерного сканирования поверхности;
- векторные карты местности с указанием навигационных отметок;
- карты в бортовом компьютере с указанием запрещённых полётных зон, курсовых точек и целевых объектов;
- спутниковые снимки местности;
- многопараметрические «симуляции областей интереса» с трёхмерным моделированием окружающего пространства и динамикой изменения обстановки.
Лазерный 2D и 3D сканер
В промышленной робототехнике для ориентирования на поверхности и выполнения измерений параметров до объектов с целью предупреждения столкновений с препятствиями применяют лазерные приборы – сканеры и камеры [3, 4]. Существуют 2D лазерные дальномеры веерного типа. Измерения осуществляются несколькими сотнями датчиков одновременно. По результатам, строится срез окружающего пространства перед камерой. Увязка и механизация работы компонентов приборов и перенос направления измерений по высоте (в вертикальной плоскости) позволяет строить трёхмерное облако точек пространства в пределах дальности сканирования окружающей среды. Вид получаемой развёртки лазера-сканера в формате 3D показан на рисунке 1.
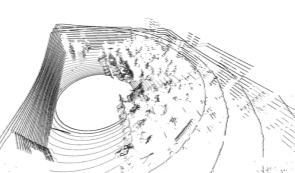
Рисунок 1 – Развёртка лазера 3D сканера в окружающем пространстве
Второй тип сканирующих лазерных приборов (лидаров) характеризуется тем, что в своём составе они имеют один измерительный лазерный дальномер и систему оптической развертки луча. Такие приборы используют прежде всего для топографической съёмки местности. Они обладают точностью измерений на удалениях до ста метров в пределах 2 мм. Полное панорамное сканирование и получение необходимых изображений может осуществляться за время около 2 минут.
Анализ показал, что применительно к задаче определения местоположения БЛА относительно окружающих предметов при полёте в условиях города, маневрирования среди высотных зданий и препятствий наибольший интерес представляют веерные лазерные сканеры, обеспечивающие достаточно высокие требуемые характеристики по точности сканирования и скорости позиционирования БЛА.
Камера формата 3D с подсветкой структурированным светом
Для измерения расстояний до объектов в некоторых приборах формата 3D используют инфракрасную (ИК) камеру высокого разрешения со смещённым относительно оптической оси камеры лазерным проектором со структурированным рисунком сетки [4]. Принцип функционирования системы «ИК-камера – лазерный проектор» показан на рисунке 2.
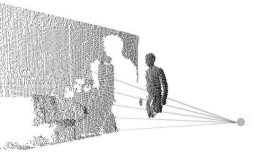
Рисунок 2 – Структурированная лазерная подсветка
ИК-камера с лазерным проектором и принцип работы системы схожи с устройством и работой стереокамеры. Отличием является то, что ИК-камера использует собственный источник света и может работать в условиях низкой освещённости. Вместе с тем, такая оптико-электронная система подвержена засветке прямым солнечным светом и имеет небольшой радиус действия (в пределах 15 метров, в зависимости от геометрических размеров и мощности подсветки). Сегодня отдельные ИК-приборы со структурированной лазерной подсветкой нашли применение в системах ориентации роботов в помещениях, а также в системах «захвата движения» типа Kinect (Microsoft) и компактных мобильных устройствах (технология Face ID (Apple).
Стереофотограмметрическая камера
Устройство прибора и сущность метода его работы состоит в совмещении изображений, получаемых от двух оптических камер, находящихся друг от друга на расстоянии стереобазы, и выделении разницы видеоизображений вследствие параллакса.
Несомненно, что достижения в области оптики и электроники, вычислительной техники и приборостроения обусловили развитие технологий визуализации объектов и построения систем технического зрения для навигации и ориентирования машин-роботов.
Наиболее известные алгоритмы ориентирования объединены в группу методов под названием SLAM (Simultaneous Localization And Mapping) – метод одновременной локализации и построения карт [5].
Метод не привязан к аппаратной базе и имеет множество вариантов реализации в алгоритмической части. Имеется целое семейство алгоритмов построения разрежённого облака точек, позволяющих проводить ориентирование на местности в режиме реального времени. Алгоритмы легко масштабируются и применяются в структурно-функциональных схемах автопилотов и приборов для навигации БЛА военного назначения и класса. Они предусматривают использование камер в различных оптических диапазонах длин волн.
На рисунке 3 показаны вид облака точек, построенного на основе алгоритмов SLAM-навигации, – результаты сканирования конфигураций двух объектов (зданий) с отображением и отметками траектории пролета БЛА и поля зрения видеокамеры при съёмке.
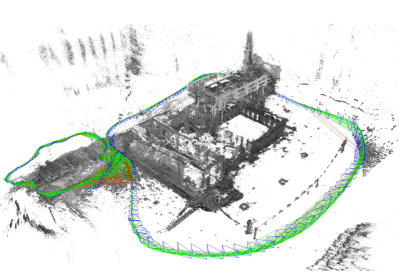
Рисунок 3 – Определение положения БЛА и 3D-картографирование местности по технологии SLAM
Одометрическая монокулярная навигация и картографирование
Метод монокулярной одометрии относится к подгруппе алгоритмов в семействе SLAM, обеспечивающих построение образов окружающего пространства при работе одной видеокамеры. Его сущность составляет смещение камеры для создания стереобазы разнесённой по времени. Позволяет использовать одну камеру сверхвысокого разрешения (или комплексированную камеру многоспектрального оптического диапазона). Определяет позиции ключевых точек изображения с применением быстрых алгоритмов обработки изображений OpticsFlow и ORB SLAM [6].
На фотоснимке рисунка 4 показаны результаты работы ORB SLAM – быстродействующего алгоритма выявления изображений опорных точек.

Рисунок 4 – Определение опорных точек изображения в алгоритмах ORB SLAM
Монокулярные одометрические камеры и методы SLAM-навигации, находят широкое применение при конструировании и создании малоразмерных БЛА (типа DJI Phantom, SZ DJI Technology).
Метод ORB SLAM для реализации в схемах с монокулярной одометрической системой получения изображенийобладает некоторыми преимуществами по сравнению с другими алгоритмами функционирования стереокамер. Необходимость обработки одного потока видеосигнала в отличие от потоков в стерефотограмметрических системах делает применение метода ORB SLAM позволяет характеризовать его как более простой и менее требовательный к синхронизации функций сканера и бортовых видеокамер. Это может являться основой при постановке и решении инженерных задач по выбору комплектов приборов, аппаратного и программного обеспечения АСНО для воздушных роботов.
Интеллектуальные системы визуальной навигации
Прогресс в области создания искусственного интеллекта и нейросетей может позволить не только адаптировать системы навигации и ориентирования БЛА для обеспечения безаварийных полётов, но и «обучать» бортовой компьютер решать задачи выбора рациональных методов получения и обработки визуальной информации, построения оптимальных траекторий и маршрутов полёта в реальном масштабе времени. Значительно расширятся возможности применения беспилотных комплексов при выполнении поисково-разведывательных операций в сложных городских условиях, закрытых помещениях, а также в лесистой местности [7].
При проектировании и создании «умных» воздушных роботов одной из основных будет задача разработки логических схем и алгоритмов автономного функционирования
На рисунке 5 показана логико-функциональная схема работы автономной системы навигации и ориентирования беспилотного летательного аппарата.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
Рисунок 5 – Функциональная схема логики работы АСНО
Обзор информационных материалов о приборах и системах видеонаблюдения показал, что использование лидаров, активных сканирующих систем и миниатюрных видеокамер наиболее предпочтительно в комплектах приборов наземных и воздушных робототехнических комплексов, где требуется большая точность позиционирования боевых машин-роботов и объектов наблюдения при сравнительно малых скоростях их передвижения, и где выполняются требования (ограничения) по массогабаритным характеристикам и параметрам энергоёмкости АСНО.
Таким образом, при разработке и совершенствовании БЛА для применения в условиях плотной городской застройки и в зонах с сильными радиоэлектроными помехами необходимо учитывать возможности построения и использования автономных систем ориентирования и навигации летательных аппаратов. Приборы, входящие в АСНО должны быть способны сканировать окружающее пространство, получать измерения и характеристики (оценки) навигационной обстановки в реальном времени. Применение оптико-электронных систем с лазерными сканерами может позволить обеспечить приемлемую точность навигации и ориентирования БЛА в форматах 2D и 3D. Важным требованием будет обеспечение автономной навигации при сохранении массогабаритных характеристик бортового оборудования и параметров функционирования систем управления беспилотных летательных аппаратов.
Литература
1. Буянов И.А., Исламов В.К. Автономная система ориентирования беспилотного летательного аппарата: состав и схема функционирования в формате 3D // Молодой ученый. №1. Казань, 2018 – С. 10-16. – URL: https://moluch.ru/archive/187/47676/ (дата обращения: 04.11.2018).
2. Купервассер О., Рубинштейн А. Система навигации беспилотных летательных аппаратов с помощью видео // IV конференция «ТРИЗ. Практика применения методических инструментов URL: http://www.metodolog.ru/node/1570 (дата обращения: 04.11.2018)
3. Загоруйко С. Н., Носков В. П. Навигация БЛА и 3D-реконструкция внешней среды по данным бортовой АСО // Мехатроника, автоматизация, управление. 2014. № 8. – С. 62–67.
4. Шведов П.Е. Комплекс технического зрения на основе лазерной структурированной подсветки в системе управления автономной колесной платформой // XIX Туполевские чтения: Международная молодежная научная конференция. Том IV. Казань: Изд-во Казанского государственного технического университета. 2011. – С. 16-18.
5. Durrant-Whyte H., Bailey T. Simultaneous localization and mapping, part i // Robotics and Automation Magazine, IEEE, vol. 13. 2006.
6. Шведов П.Е. Программный комплекс видеоконтроля.// Молодеж. Техника. Космос: труды IV Общероссийской молодежной научно-технической конференции / Балтийский государственных технический университет. – СПб.; 2012. – С. 313-314.
7. Nvidia разработала дрон, способный летать без GPS – URL: www.nvidia.ru/object/drone-navigates-without-gps-ru.html (дата обращения: 04.11.2018).

