Статья содержит основные результаты исследований по построению и применению комплекса беспилотных летательных аппаратов для работы в условиях высокоинформативной подстилающей поверхности. Используя методологию системного инжиниринга проведен анализ особенностей функционирования, выявлены задачи и основные свойства бортовых приборов, обеспечивающих ориентацию аппаратов, обзор окружающего пространства и подстилающей поверхности. Разработаны требования к построению автономной системы навигации и ориентирования беспилотных машин-роботов для совершения полётов в городских условиях.
Ключевые слова: беспилотный летательный аппарат (БЛА), полёт, автономная система навигации и ориентирования (АСНО), пространство, городская среда, подстилающая поверхность, задачи, требования, функционирование.
В последние годы массовое применение беспилотных летательных аппаратов (БЛА) характерно для самых различных сфер человеческой деятельности. Существует множество комплексов БЛА для решения как военных, так и гражданских задач. Для эффективного выполнения задач необходимо обеспечить определение местоположения летательного аппарата. Эта задача в настоящее время часто решается за счет применения бортовых систем на основе радиокомандного управления, радиомаяков и приемников GPS (США) и ГЛОНАСС (Россия). Дополнительными или альтернативными техническими средствами могут служить автономные системы навигации и ориентирования (АСНО) [1], построенные на различных принципах. В их состав входят миниатюрные приборы и устройства, обеспечивающие сканирование, обзор и формирование картины окружающего пространства в форматах 2D и 3D, проведение измерений, скоростную обработку, анализ и передачу данных.
Изучение материалов, отражающих опыт ведения военных (боевых) действий за последние десятилетия, показывает, что при подготовке и в ходе операций для решения задач воздушной разведки применялись аппараты, способные совершать полёты по программе. Разведывательные и ударные БЛА призваны сохранять жизни пилотов и дорогостоящую авиационную технику [2].
Использование комплексов БЛА при ведении операций в крупных городах и населённых пунктах вызвало определённую специфику в тактике действий войск и способах применения средств вооруженной борьбы [3, 4]. Военное командование США неоднократно отмечало, что при ведении уличных боёв наиболее сложными проблемами, с которыми столкнулись армейские подразделения, являлись следующие:
– крайне низкая эффективность использования разведывательных систем;
– проблемы определения принадлежности противника к боевым подразделениям;
– действие противоположной стороны малочисленными группами (8–10 чел.);
– наличие значительного числа мирных жителей в местах ведения боевых действий.
Ещё в конце 90-х годов комендант корпуса морской пехоты США генерал Чарльз Крулак в работе «Война трёх кварталов» (Three Block War — «Трёхблочная война») описал особенности и смешанный тип боя в городе [4]. Данная концепция предусматривает, что в ходе военных действий и вооруженных столкновений в городских условиях одновременно ведутся операции трёх типов:
1) борьба с регулярными войсками — танки и воздушные силы должны осуществлять уничтожение врага и захватывать его территорию, географические объекты;
2) столкновения с иррегулярными формированиями, противодействие партизанским и террористическим атакам с выполнением задач охраны населения и контроля работы жизненно важных объектов инфраструктуры (гуманитарная миссия);
3) мероприятия по стабилизации обстановки (миротворческие), включающие обучение полицейских контингентов, создание гражданских институтов управления, восстановление городской среды обитания при взаимодействии с местным населением.
В американском уставе FM 3–06 (FM 90–101) Urban Operations городская среда определяется и рассматривается как система, состоящая из трёх взаимосвязанных элементов (рисунок 1).

Рис. 1. Основные элементы городской среды [5]
Особенностью боя в городе и применения БЛА является необходимость обнаружения и поражения противника в жилых кварталах, снаружи и за стенами высотных домов. В отличие от традиционного (классического) двумерного «поля боя» в условиях «городского пространства» оружие и техника будут применяться в различных «измерениях»: в воздушном пространстве, на открытых поверхностях, внутри зданий и сооружений и даже под землей [5]. Основные компоненты пространства, наименования поверхностей, которые могут служить ориентирами, и на которых могут размещаться объекты разведки и поражения при ведении боя в городе, показаны на рисунке 2.
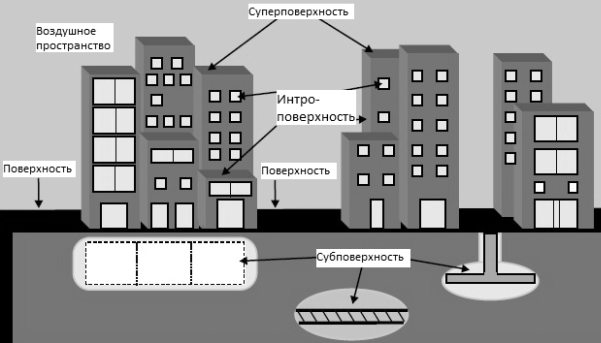
Рис. 2. Основные компоненты городского пространства
Обзор информационных материалов о характере и условиях ведения локальных войн и вооружённых конфликтов свидетельствует о том, что наиболее ожесточённо и интенсивно боевые действия велись в густонаселённых городах и районах (Афганистан, Ливия, Ирак, Ливан, Иран, Сирия, Палестино-Израильские территории). В ряде случаев применение танков, артиллерии, боевых машин пехоты, пилотируемых самолётов и вертолётов было затруднительным и малоэффективным. Действия наземных сил и пилотируемой авиации значительно ограничивались. Нанесение ударов по противнику зачатую приводило к нежелательным сильным разрушениям жилых зданий, промышленных и коммуникационных объектов.
В связи с этим перед разработчиками вооружения и военной техники ставились задачи создания новых разведывательных и боевых комплексов БЛА, способных автономно функционировать в городских районах с плотной и высотной застройкой, при наличии естественных и искусственных помех, «забитого» радиоэфира [6].
Создаваемые и разрабатываемые комплексы БЛА должны обеспечивать совершение аэродинамического полёта по программе и обнаружение малоразмерных объектов. Полёты в городских условиях будут планироваться и осуществляться для решения задач поражения различных объектов (ударные задачи), ведения воздушной разведки и ретрансляции сигналов управления и связи, доставки грузов (транспортные задачи) [7, 8]. Требования и задачи функционирования комплексов БЛА, которые необходимо учитывать при разработке АСНО, приведены в таблице 1.
Таблица 1
Требования и задачи функционирования БЛА
|
Наименование требований к БЛА |
Задачи (тип) БЛА | |||
|
Ударные |
Разведывательные/ организации связи |
Транспортные | ||
|
Общие (планер и двигатель) |
Всепогодность |
+ |
+ |
+ |
|
Всесуточность |
+ |
+ |
+ | |
|
Преодоление искусственных помех |
+ |
- |
+ | |
|
Совершение манёвра на конечном участке полёта (траектории) |
+ |
- |
+ | |
|
Скорость горизонтального полёта |
Высокая |
Низкая |
Средняя | |
|
Скорость на конечном участке полёта и наведения в цель |
Высокая, средняя |
- |
Средняя, низкая | |
|
Переносимые перегрузки |
Высокие |
Низкие |
Средние | |
|
Система навигации и ориентирования |
Обзор окружающего пространства |
+ |
+/- |
+ |
|
Позиционирование БЛА |
Определение положения относительно цели |
Определение положения относительно других объектов |
Определение положения относительно цели | |
|
Объекты обнаружения |
Статические, динамические |
Статические, динамические |
Статические | |
|
Точность измерения высоты полёта |
м |
дм — м |
дм — м | |
|
Точность позиционирования в горизонтальной плоскости (2D) |
1–10 м |
1–2 м |
1–10 м | |
|
Точность позиционирования на конечном участке полёта |
Определяется размерами цели (дм) |
- |
Определяется зоной посадки (дм — м) | |
|
Точность позиционирования на конечном участке (3D) |
1 м |
- |
1–10 м | |
Анализ показал, что при разработке предложений по составу и технико-функциональным характеристикам автономных систем навигации и ориентирования БЛА должны учитываться не только конструктивные и лётно-технические показатели беспилотников, но и их задачи, особенности и возможности совершения управляемого полёта в сложных (городских) условиях. Системы для воздушных ударных, разведывательных и транспортных машин-роботов должны создаваться с учётом массы, габаритов, грузоподъёмности, а также требований назначения БЛА, специфики их полезной нагрузки и условий выполнения боевых задач.
АСНО ударного БЛА должна без сбоев функционировать в ходе полёта аппарата, при следовании его в назначенную зону, барражировании на различных высотах, в процессе разведки, поиска, обнаружения цели и наведения на неё бортового оружия. Навигация и ориентирование БЛА на конечном этапе полёта должны осуществляться в ограниченном пространстве. Требования к АСНО БЛА транспортного класса состоят в возможности ориентации и навигации летательного аппарата в режимах взлета/посадки и крейсерского полета по маршрутным точкам в рамках существующей карты местности.
Особенность функционирования АСНО беспилотных аппаратов — обеспечение манёвренного полёта между высотными домами и строениями. Кроме того, АСНО как составная часть системы управления БЛА должна иметь гибкую структуру, возможность изменять режимы и алгоритмы работы. Она должна быть функционально надёжной и защищённой от радиоэлектронных помех.
Для реализации принципов управляемого полёта, навигации и ориентирования БЛА на их борту могут размещаться специальные комплекты оптико-электронных приборов и систем, обеспечивающих круговой обзор окружающего пространства, измерение параметров полёта, сканирование и получение видеоизображений наземных объектов в форматах 2D и 3D, накопление и обработку больших объёмов информации, скоростную передачу команд и сигналов по каналам (линиям) связи.
При определении показателей эффективности и надёжности функционирования АСНО необходимо учитывать виды помех и уязвимости контуров в системах управления БЛА. Основные уязвимости системы управления современных БЛА показаны на рисунке 3.
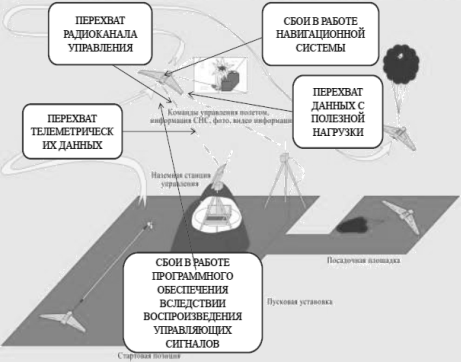
Рис. 3. Уязвимости системы управления БЛА [2]
Сегодня для борьбы с БЛА могут применяться различные средства и станции радиоэлектронной борьбы. Например, комплексы, способные на дальностях до 10 км перехватывать и модифицировать команды управления и заглушать сигналы спутниковой навигации — AUDS Anti-UAV Defence System (Blighter, USA) [9] и комплекс «Солярис-Н» (АО «Концерн «Созвездие», Россия), который был представлен на международной выставке «Интерполитех-2018» [10].
Такими образом, при выполнении научно-исследовательских и опытно-конструкторских работ по созданию и совершенствованию систем управления БЛА будут актуальными задачи выбора состава АСНО и схем их построения. Обоснование комплектов приборов и характеристик системы для различных БЛА необходимо проводить с учётом целевого предназначения и условий полёта аппаратов, закономерностей и особенностей влияния разнородных помех на функциональные возможности. Важное значение будет иметь выявление лётно-технических показателей и качественно-количественных оценок эффективности функционирования автономной системы навигации и ориентирования БЛА в городских условиях. Появление и совершенствование автономных робототехнических комплексов в перспективе может стать одним из оснований для исключения возможности возникновения ряда локальных конфликтов.
Литература:
1. Буянов И. А., Исламов В. К. Автономная система ориентирования беспилотного летательного аппарата: состав и схема функционирования в формате 3D // Молодой ученый. — 2017. — № 50. — С. 24–30. URL: https://moluch.ru/archive/184/47140/ (дата обращения: 04.11.2018).
2. Мезенцев В. В. Особенности функционирования беспилотных летательных аппаратов ближнего действия в условиях информационно-технического воздействия // Доклады и статьи ежегодной научно-практической конференции «Перспективы развития и применения комплексов с беспилотными летательными аппаратами». — Коломна, 2016. — С. 212–216.
3. Малышев В. Г. Маленькие хитрости уличного боя // Независимое военное обозрение. — 2003. — № 30.
4. Попов И. М. О долгосрочных характеристиках войн и вооруженных конфликтов // Некоторые аспекты анализа военно-политической обстановки: монография / под ред. А. И. Подберезкина, К. П. Боришполец. МГИМО (ун-т) МИД России, центр военно-полит. исследований. — М.: МГИМО–Университет, 2014. — С. 659–836.
5. FM 3–06 (FM 90–101) Urban Operations. Washington, 2003 June. — С. 2–2.
6. A Roadmap for U. S. Robotics. From Internet to Robotics. 2016 edition. URL: http://jacobsschool.ucsd.edu/uploads/docs/2016/roadmap3-final-2b.pdf (дата обращения: 20.10.2018).
7. Комаров А. О., Скворцова М. А., Орешкова О. В. Автономная визуальная навигация бортовой системы беспилотного летательного аппарата // «Политехнический молодежный журнал» МГТУ им. Н. Э. Баумана. — 2017. — № 6(11).
8. Flying Real-Time Network to Coordinate Disaster Relief Activities in Urban Areas // US National Library of Medicine. Дата обновления: 22.05.2018. URL: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5982691 (дата обращения: 31.10.2018).
9. AUDS Anti-UAV Defence System // Blighter. Дата обновления: 04.09.2017. URL: http://www.blighter.com/products/auds-anti-uav-defence-system.html (дата обращения: 26.10.2018).
10. Ростех создал «интеллектуальный» комплекс для борьбы с беспилотниками // Ростех. Дата обновления: 25.10.2018. URL: https://rostec.ru/news/rostekh-sozdal-intellektualnyy-kompleks-dlya-borby-s-bespilotnikami (дата обращения: 26.10.2018).

