Среди роботов различных типов нужно выделить отдельную группу мобильных роботов.
Мобильный робот перемещается для решения тех или иных задач, получает данные с внешних датчиков, и должен постоянно обрабатывать информацию, чтобы управлять своим движением. Все эти процессы происходят непрерывно и тесно взаимосвязаны друг с другом.
Мобильные роботы, включающие в себя чувствительные элементы, исполнительные механизмы, компьютеры и обладающие элементами искусственного интеллекта, представляют весьма удобный объект для постановки, изучения и нахождения решений современных проблем мехатроники.
Их создание во многом ещё требует поиска нестандартных решений в разработке их конструкций, алгоритмического, сенсорного и программного обеспечения.
Для всех роботов этой группы свойственны общие признаки, а именно, все они используют: движитель, способный обеспечить передвижение робота в заданной среде; набор внутренних датчиков информации, обеспечивающих в системе управления робота возможность регулирования состояния его систем и формирование требуемого движения его приводных механизмов; локальные и дистанционные средства определения характеристик опорных и/или профильных характеристик окружения робота для автономного исполнения процессов принятия решений о требуемом или возможном движении; интерфейс для взаимодействия (пульт управления).
Анализ предметной области и аналогов
На этапе проектирования системы были тщательно изучены существующие аналоги. Одним из наиболее приближенных примеров является мобильный робот «Варан» (рис. 1).

Рис. 1. Мобильный робот «Варан»
Данный проект — это подвижная, дистанционно управляемая платформа для выявления, обезвреживания и уничтожения взрывных устройств. Мобильный робот «Варан», помимо обнаружения, обезвреживания, уничтожения на месте или доставки в специальном контейнере в безопасное место взрывных устройств, способен также выполнять такие задачи, как ведение разведки в городских или полевых условиях и работы в опасных для здоровья и жизни человека местах (в условиях радиационного, химического и биологического заражения). Он может работать как в управляемом удаленным оператором режиме, так и в автономном режиме, по заранее введенной в него программе. На гусеничную платформу «Варана», в зависимости от поставленной задачи, может устанавливаться различное рабочее оборудование. Например, двухпальцевый манипулятор, системы видеонаблюдения или водомет, служащий для уничтожения взрывных устройств.
Также, к основным недостаткам проекта относятся:
высокая цена;
достаточно сложное подключение;
огромный функционал.
Еще один аналог — мобильный робот «РобоРовер М1 Education» (рисунок 1.2).
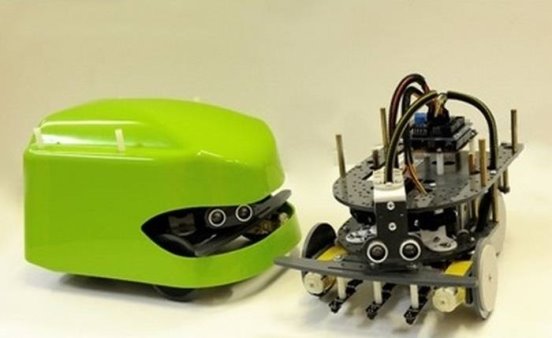
Рис. 2. Мобильный робот «РобоРовер М1 Education»
Это четырехколесный образовательный робот для практического и нескучного изучения программирования, робототехники и электроники. Робот поставляется полностью собранным и настроенным к работе. В комплекте с роботом поставляется все необходимое для первого запуска: инструкция, аккумулятор, зарядное устройство, отвертка, мини-поле для движения по линии. Робот имеет небольшие размеры для комфортной с ним работы учеником. Робот оснащен двумя оптическими датчиками расстояния Sharp, тремя датчиками линии, одним ультразвуковым датчиком расстояния на поворотном сервоприводе.
К роботу разработана графическая среда программирования под названием РоверБлок. В программе используются блоки, чтобы программировать робота. Каждый блок отвечает за считывание показаний с определенного датчика или за действие при помощи электродвигателя или сервопривода.
Данный проект также не лишен недостатков:
управление роботом осуществляется только по Bluetooth;
нет мобильного приложения.
Микроконтроллеры.
Современную микроэлектронику трудно представить без такой важной составляющей, как микроконтроллеры. Микроконтроллеры незаметно завоевали весь мир. В последнее время на помощь человеку пришла целая армия электронных помощников. Одно и то же устройство, которое раньше собиралось на традиционных элементах, будучи собрано с применением микроконтроллеров, становится проще, не требует регулировки и меньше по размерам. Кроме того, с применением микроконтроллеров появляются практически безграничные возможности по добавлению новых потребительских функций и возможностей к уже существующим устройствам.
Сегодня на рынке существует множество фирм-производителей, выпускающих различные микроконтроллеры. Рассмотрим несколько из них.
Семейства ARM.
Микроконтроллеры семейства ARM — семейства лицензируемых 32-битных и 64-битныхмикропроцессорных ядер разработки компании ARM Limited.
В основном процессоры семейства завоевали сегмент массовых мобильных продуктов (сотовые телефоны, карманные компьютеры) и встраиваемых систем средней и высокой производительности (от сетевых маршрутизаторов и точек доступа до телевизоров). Отдельные компании заявляют о разработках эффективных серверов на базе кластеров ARM процессоров, но пока это только экспериментальные проекты с 32-битной архитектурой.
Архитектура ARM обладает следующими особенностями RISC:
архитектура загрузки/хранения;
нет поддержки нелинейного (не выровненного по словам) доступа к памяти;
равномерный 16х32-битный регистровый файл;
фиксированная длина команд (32 бита) для упрощения декодирования за счет снижения плотности кода. Позднее режим Thumb повысил плотность кода;
одноцикловое исполнение.
Микроконтроллеры Arduino.
Стоить обратить внимание на микроконтроллеры Arduino. На них нет операционной системы, как на Raspberry Pi, они не сложны в изучении и подойдут как для новичков, так и для более продвинутых пользователей.
Отладочная плата Arduino Uno построена на микроконтроллере Atmega328P.
Платформа пользуется огромной популярностью во всем мире благодаря удобству и простоте языка программирования, а также открытой архитектуре и программному коду. Устройство программируется через USB без использования программаторов.
Основные преимущества данной платы:
кроссплатформенность;
простая среда программирования;
открытый исходный код;
открытые спецификации и схемы оборудования.
Наиболее распространенные версии плат: Uno, Leonardo, Nano, Mini, Mega (рисунок 3).

Рис. 3. Микроконтроллер Arduino Uno
Литература:
- РобоРовер М1 Education — образовательный робот для студентов. [Электронный ресурс]. — Электронные данные. — Режим доступа: https://mrobot.by/blog/79-roborover-m1-education-obrazovatelnyj-robot-dlya-studentov-i-shkolnikov-dlya-studentov-i-shkolnikov/
- Робот «Варан» — роботехническая платформа. [Электронный ресурс]. — Электронные данные. — Режим доступа: https://3dnews.ru/563129
- Белов, А. В. Самоучитель по микропроцессорной технике / А. В. Белов — [2-е изд.] — СПб.: Наука и техника, 2007. — 240 с.
- Евстифеев А. В. Микроконтроллеры AVR Семейства Tiny. / Евстифеев А. В. — М.: Издательский дом «Додэка-XXI», 2007. — 432 с.

