В статье приводится обзор современных методов оценки геометрических параметров аэродинамических поверхностей самолета. Предлагаются и оцениваются возможные реализации систем измерения угла отклонения руля высоты и выбирается наиболее оптимальный. Предлагается метод оценки стабильности оцениваемых процессов и параметров аэродинамической поверхности.
Ключевые слова: хвостовое оперение, средство измерений, аэродинамическая поверхность самолета.
Введение
Современные системы измерения углов отклонения аэродинамических поверхностей самолета предусматривают использование современных средств измерений, методов обработки информации, полученных в процессе проведения измерений, а также способов задания системы координат, в которых проводятся измерения.
Создание таких систем в соответствии с предъявляемыми к ним требованиями со стороны заказчика, является трудоемким процессом, требующим от разработчика кропотливой оценки возможных вариантов реализации системы.
Опыта применения таких систем в отечественной практике недостаточно для того, чтобы проводить процесс их разработки оптимально.
Также постоянное повышение требований к точности измерений параметров вынуждает разработчиков рассматривать более комплексные и сложные способы определения и измерения параметров.
С целью облегчения и ускорения работ по выбору возможных вариантов реализации систем измерения в данной статье предложен метод выбора оптимальных параметров системы с применением системного подхода, заключающимся в рассмотрении объекта как комплекса взаимосвязанных функций, удовлетворение которых конкретными техническими решениями приведет к возникновению облика разрабатываемой системы.
Постановка задачи
В данной статье методы и средства измерения угла отклонения рассмотрены на примере руля высоты самолета.
Руль высоты — это аэродинамический орган управления, обеспечивающий изменение угла тангажа самолета в процессе полета, а также его продольную устойчивость. Он располагается на концевой части горизонтального стабилизатора самолета. Внешний вид Руля Высоты представлен на рисунке 1.
![Руль Высоты самолета АН-124. [1, стр. 14]. 1 — створка; 2 — крышка; 3 — торцевая нервюра; 4,5 — диафрагмы носка; 6,7 — верхние панели; 8 — носок; 9 — лонжерон; 10 — законцовка; 11 — такелажный узел; 12 — фторопластовый упор; 13 — пружина](https://articles-static-cdn.moluch.org/articles/j/118111/images/118111.001.png)
Рис. 1. Руль Высоты самолета АН-124. [1, стр. 14]. 1 — створка; 2 — крышка; 3 — торцевая нервюра; 4,5 — диафрагмы носка; 6,7 — верхние панели; 8 — носок; 9 — лонжерон; 10 — законцовка; 11 — такелажный узел; 12 — фторопластовый упор; 13 — пружина
В поставленной задаче под углом отклонения понимается пространственный угол между осью вращения руля высоты и его кромкой.
Ось вращения проходит через кронштейны крепления электрогидравлических приводов к рулю высоты и специальные кронштейны крепления руля высоты к стабилизатору. Данные кронштейны располагаются на самом руле высоты.
Под кромкой руля высоты понимается геометрическое место точек, которые располагаются максимально далеко от стабилизатора, но все ещё в пределах руля высоты.
Под исходным положением Руля высоты понимается такое его положение, при котором не нарушается аэродинамическое обтекание горизонтального оперения. В таком положении кромка Руля высоты дополняет кромку горизонтального оперения и образует с ней одной целое.
Для решения задачи об определении угла отклонения аэродинамической поверхности необходимо также ввести трехмерную систему координат, в которой будут проводится измерения. Для построения такой системы координат необходимы следующие компоненты:
– точка, относительно которой будут проводится измерения, или начало координат;
– вектор, задающий направление оси Х системы координат;
– вектор, задающий направление оси Y системы координат;
– вектор, задающий направление оси Z системы координат.
Для системы измерения угла отклонения руля высоты началом координат удобно принять центр проушины для крепления тяги, соединяющей Руль Высоты и Стабилизатор. Начало координат указано красной точкой на рис. 2
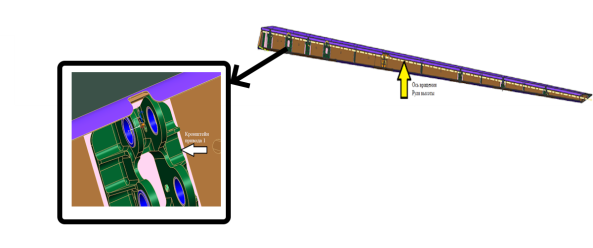
Рис. 2. место начала системы координат
Определить ось Y удобно вектором, построенным по следующим точкам: начало которого — точка центра системы координат, а конец — центр проушины Кронштейна навески, расположенного ближе к килю самолета.
Ось Z же удобно определить вектором, построенным по следующим точкам: начало которого — центр проушины для крепления электрогидравлического привода Руля Высоты к стабилизатору Кронштейна привода, а конец — точка центра системы координат.
Оси Y и Z, а также векторы, которые их образуют, представлены на рисунке 3.
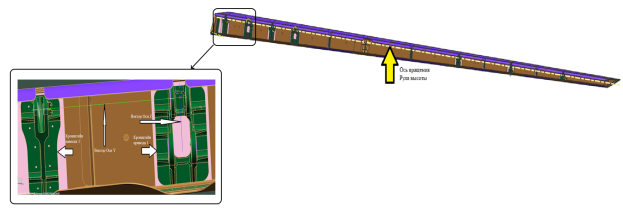
Рис. 3. оси Y и Z
Ось X удобно определить вектором, начало которого — центр проушины для крепления тяги, соединяющей Руль Высоты и Стабилизатор, на кронштейне крепления привода, а конец — точка центра начала координат.
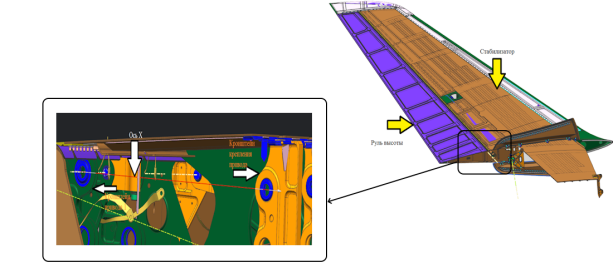
Рис. 4. ось X
Также стоит отметить, что применяемые средства и методы измерений должны обеспечивать установленные заказчиком требования к точности измерений параметров. В решаемой задаче предъявлены следующие требования:
– система измерений угла отклонения должна обеспечивать измерение угла отклонения аэродинамической поверхности Руля Высоты от нулевого положения без приложенного к нему изгибающего момента в диапазоне от -30 до +25°;
– система измерений угла отклонения должна обеспечивать измерение угла отклонения контрольных точек аэродинамической поверхности Руля Высоты с точностью ±1° (если измеряется угловое перемещение);
– центр системы координат должен быть привязан к оцениваемому Рулю Высоты с точностью ±1 мм.
В соответствии с Российским законодательством погрешность измерения системы не должна превышать 1/3 части допуска измеряемого параметра. Данное требование также накладывает ограничения на разрабатываемую систему.
Облик системы измерений
Для определения облика системы воспользуемся предлагаемой системным инжинирингом системой «требования — функции — элементы решений». Проведенный анализ представлен в таблице 1.
Для этого выделим основные требования, предъявляемые заказчиком к системе, выявим функции, которые необходимо для этого реализовать, и предложим возможные варианты удовлетворения каждой из предложенных функций.
После проведения такой операции получим возможные варианты реализаций системы измерений, скомбинировав элементы решений.
Таблица 1
Система «требования — функции — элементы решений»
|
Требования |
Функции |
Элементы решений |
|
Определить объект исследования |
определение ось вращения |
Использовать свободные элементы вала вращения |
|
Определить по кронштейнам крепления руля к каркасу стенда | ||
|
Задать координатами, используя 3D-модель руля высоты | ||
|
определение кромки руля высоты |
Светооражающие метки по кромке руля | |
|
Провести лазерным сканером по поверхности | ||
|
Использовать крайние точки кромки крыла | ||
|
определение начала системы координат |
Определить кронштейну на руле высоты | |
|
Задать координатами, используя 3D-модель руля высоты | ||
|
Определить систему координат, в которой будут проводится измерения |
определение осей системы координат |
Установить средство измерений перпендикулярно оси Z |
|
Задать координаты векторов трекеру используя 3D-модель руля | ||
|
Установить светоотражающие элементы на основные точки, характеризующие оси | ||
|
определение исходного положения руля высоты в системе координат |
Сравнение координат руля высоты и края хвостового оперения | |
|
Сравнение расстояния от кронштейна крепления к каркасу до кромки руля высоты | ||
|
Проводить измерения в диапазоне от -25° +35° и точностью ±1° |
Подобрать средство измерений с соответствующим диапазоном измерений и точностью |
Использовать систему лазерного сканирования |
|
Использовать систему сканирования на основе фотограмметрии | ||
|
Использовать тахеометр | ||
|
Использовать инклинометр | ||
|
Предусмотреть возможность калибровки системы измерений |
Использовать в качестве калибра квадрант оптический | |
|
Оценить влияние погрешности измерений при регистрации данных системой регистрации данных |
Провести анализ погрешности системы измерений и сложить с погрешностью измерений средства измерений | |
|
Оценить параметры распределения, статическую совместимость и корреляцию выборок |
Применить аппарат статистики для оценки параметров распределения выборок, статистической совместимости, корреляции выборок |
Проводить оценку, используя случайные величины |
|
Проводить оценку с использованием случайных функций | ||
|
Оценить стационарность случайных процессов, которыми интерпретируются отклонения геометрических параметров рулей. |
Построить графики автокорреляционных функций, по которым определить области нарушения стационарности |
Использовать встроенные функции ПО Excel |
|
Использовать ПО Matlab | ||
|
Функционирование под расчетными нагрузками |
Расположить элементов за пределами руля высоты |
Использование тахеометров, лазерных сканеров и 3D сканеров, которым не требуется непосредственный контакт с измеряемым объектом |
|
Упрочнить конструкции средств измерений |
Создание усилительных каркасных конструкций на средствах измерений | |
|
Расположить на местах, к которым нагрузка не прикладывается |
Соединить средства измерения с боковыми поверхностями Руля Высоты | |
|
Обеспечить функционирование в течение длительного времени |
Защитить от перегрева средства измерений |
Охлаждать потоком воздуха |
|
Охлаждать водяной системой охлаждения | ||
|
Использовать тахеометры, датчики перемещения, устройства фотограмметрии для фиксации результатов | ||
|
Обеспечить достаточный объем памяти средств хранения информации для её записи |
Блочная система из большого числа жестких дисков. Объем не менее 3 Тб | |
|
Использовать сервера компании, передавая информацию через беспроводную сеть |
Обзор средств и методов измерений
Развитие технических систем, способных осуществлять 3D-сканирование объектов, расширяет спектр возможных к применению средств измерений. Рассмотрим некоторые из них:
- Системы лазерного сканирования
Лазерное сканирование — это способ сканирования пространства или объектов, заключающийся в измерении расстояния от сканера до измеряемой точки посредством определения времени, за которое лазерный луч прошел от сканера до измеряемого объекта. С помощью лазера сканер определяет не только расстояние до объекта, но также и вертикальный и горизонтальный угол измеряемой точки объекта.
В целом, лазерный сканер делает то же самое, что и тахеометр, но отличием сканера является то, что он проводит большее количество измерений в единицу времени. Путем быстрого измерения положения большого числа точек поверхности лазерный сканер создает трехмерное изображение сканируемой поверхности или объекта, располагая точки относительно встроенной системы координат.
Лазерное сканирование имеет следующие преимущества перед другими системами, способными создавать трехмерное изображение объектов [2]:
– высокая степень автоматизации процесса сбора информации об объекте;
– определение координат точек объекта в любых условиях освещения и погоды;
– визуализация результата сканирования в реальном времени;
– нет необходимости сканировать объект в нескольких положениях с целью наложения результатов друг на друга (при условии, что зона покрытия сканера позволяет охватить объект целиком);
– высокая точность определения координат точек;
– высокая скорость получения и обработки информации, что позволяет получать 3D-модель объекта быстрее устройств, основанных на других принципах сканирования;
– высокая детализация полученной модели;
Для системы измерения угла отклонения аэродинамических поверхностей применение лазерного сканирование видится перспективным направлением. Получив цифровую копию исследуемого объекта в начальном положении возможно, при правильной настройке встроенной системы координат сканера, сравнения текущего положения поверхности с исходным путем определения изменения положения соответствующих точек поверхности в пространстве.
Высокая точность определения координат точек позволит значительно уменьшить погрешность измерения угла отклонения поверхности.
- Системы сканирования на основе фотограмметрии
Фотограмметрия — научная дисциплина, которая занимается определением формы, размеров, положения и типов объектов в пространстве по их изображениям.
Принцип работы систем 3D-сканирования на основе фотограмметрии заключается в получении данных о размерах и поверхностях реальных объектов за счёт фотоснимков.
Процесс сканирования происходит следующим образом:
– Статичный объект фотографируют с разных ракурсов, в результате чего получается множество снимков.
– ПО на основе полученных снимков определяет положение каждой точки в встроенной системе координат, переходя из системы координат снимка в систему координат фотограмметрии.
Проводя различные сравнения положения этих точек в пространстве можно определить любые геометрические параметры измеряемого объекта, его положение, изменение положения (при сравнении положения одних и тех же точек в различном временном промежутке).
Преимуществами данной технологии 3D-сканирования являются:
– низкие затраты на аппаратную часть;
– бесконтактная технология.
При этом у технологии имеются следующие недостатки:
– сложность процедуры установки приёмных камер и нанесения точек привязки;
– для базовой установки и калибровки требуется как минимум 4–6 фото;
– большое количество фотографий, необходимых для получения точной модели;
– сложность процедуры сшивки изображений для получения целостной картины сканирования.
Для систем измерения угла отклонения аэродинамических поверхностей данная технология также применима. Отличие от лазерного сканирования будет заключаться лишь в том, что вместо лазерного сканера, который оператору необходимо держать в руках для проведения лазерного сканирования, будет использоваться множество камер.
Данная технология менее предпочтительна в связи с необходимостью использования большого числа фотографий для точного сканирования объекта, что приводит либо к увеличению длительности проводимых измерений, либо к необходимости установки большого числа камер в зале испытаний.
Помимо систем 3D-сканирования возможно также применение более привычных в отечественной практике средств измерений — тахеометров и инклинометров. Рассмотрим их подробнее.
- Тахеометры
Тахеометр — это устройство для измерения расстояния, горизонтальных и вертикальных углов. Наибольшее распространение он получил в геодезии в связи со своей компактности, мобильности и скорости проводимых измерений.
Принцип работы тахеометра заключается в сравнении параметров выходного сигнала, отправляемого к исследуемой точке, и вернувшегося сигнала, отраженного от поверхности, на которой расположена исследуемая точка. В основном для сравнения выходного и отраженного сигнала используется два метода: фазовый и импульсный.
При использовании фазового метода сравнение происходи по разности фаз испускаемого и отраженного сигнала. Данный метод позволяет проводить измерения с точностью до 1мм на расстоянии 1км от объекта.
При использовании импульсного метода сравнение происходит на основании измерении времени от момента излучения сигнала тахеометром до момента принятия отраженного сигнала. Этот метод обеспечивает точность до 0,5 мм на расстоянии до 5 км. Данные тахеометры менее распространены в связи с сложностью и дороговизной их производства.
Преимуществами использования тахеометров являются:
– отсутствие необходимости в дополнительных вычислительных и программных средствах для получения результата;
– компактность устройства и устройств для его расположения;
Недостатками данных устройств являются:
– подверженность способа измерения ошибкам со стороны человека;
– длительный процесс подготовки к проведению измерений;
– необходимость нанесения дополнительных отражающих меток на объект измерения для повышения точности измерений
В связи с тем, что тахеометр может измерять как расстояния до точки, так и угол её наклона, данное устройство отлично подходит для системы измерения угла отклонения аэродинамических поверхностей. Для системы данное средство удобно тем, что не требует большого пространства для его установки.
Сдерживающим его применения фактором является более низкая точность измерения, чем при использовании систем лазерного сканирования, сложность его калибровки в составе системы измерения и необходимость нанесения на объект испытаний дополнительных меток.
- Инклинометры
Инклинометр — это первичный преобразователь, определяющий угол наклона объектов или поверхностей относительно гравитационного поля Земли.
Принцип работы инклинометра основан на измерении двух независимых векторов: вектора ускорения свободного падения и вектора напряженности магнитного поля Земли. Первичная информация формируется в трехкомпонентном акселерометре и трехкомпонентном магнитометрическом датчике.
По конструкции инклинометры подразделяются на одно-, двух- и трехосевые.
В зависимости от модели датчика наклона при изменении угла выходной сигнал меняется либо линейно, либо синусоидально (при аналоговом выходном сигнале).
Преимуществами использования инклинометров являются:
– проведения прямого измерения угла отклонения исследуемого объекта;
– простота калибровки;
– простота внедрения в существующие системы измерения в связи с выходным сигналом в виде электрической величины;
– высокая скорость проведения измерений
Недостатками инклинометров являются:
– необходимость монтажа на исследуемой поверхности;
– более низкая в сравнении с системами 3D-сканирования точность измерений;
– небольшой диапазон измерений.
Применение инклинометров является одним из наиболее простых способов определения угла отклонения поверхностей, т. к. устройство предназначено для определения таких углов. Их легко встроить в текущие системы регистрации и обработки данных.
Недостатками для крупных систем является низкий диапазон измерений. В широко применяемых решения он достигает ±15°, что абсолютно недостаточно для измерения отклонений органов управления самолетов. Также ограничением является необходимость установки его непосредственно на исследуемом объекте
Сравнение возможных альтернатив
Основным элементом, который будет влиять на оценку возможных реализаций системы измерений, будут являться средства измерений. Поэтому предлагается составить несколько компоновок возможных вариантов реализации системы измерения угла отклонения руля высоты и провести их сравнительный анализ. Для данной работы нами предлагаются следующие варианты компоновки систем измерения:
Таблица 2
|
Обозначение варианта |
Описание варианта |
|
ТАХ |
В качестве средства измерения будет использоваться тахеометр. На элементы Руля Высоты Система координат будет задана хвостовым оперением в соответствии с положениями, указанными в постановке задачи. Обработка полученных результатов будет проводится с помощью ПО системы регистрации данных |
|
ФОТ |
В качестве средства измерения будет использоваться система фотограмметрического 3D сканирования. Система координат будет задана хвостовым оперением в соответствии с положениями, указанными в постановке задачи. Обработка полученных результатов будет проводится с помощью встроенного в систему ПО (для формирования 3D-скана объекта) и ПО системы регистрации данных на основании модели, расположенной в среде NX корпорации |
|
ЛАЗ |
В качестве средства измерения будет использоваться система лазерного 3D сканирования. Система координат будет задана хвостовым оперением в соответствии с положениями, указанными в постановке задачи. Обработка полученных результатов будет проводится с помощью встроенного в систему ПО (для формирования 3D-скана объекта) и ПО системы регистрации данных на основании модели, расположенной в среде NX корпорации |
|
ИНК |
В качестве средства измерения будет использоваться инклинометр. Инклинометр будет расположен на руле высоты и будет измерять изменение своего положения в пространстве. Система координат будет задана хвостовым оперением в соответствии с положениями, указанными в постановке задачи. Обработка полученных результатов будет проводится с помощью ПО системы регистрации данных |
Оценку альтернатив будет проводится с помощью метода Гермейера по следующим параметрам:
- Точность измерения угла отклонения — основной параметр, который должна удовлетворить система измерений;
– Частота регистрации угла отклонения — важный параметр, который влияет на скорость проведения испытаний. При низкой частоте регистрации придется слишком долго держать Руль Высоты в текущем положении
– Время беспрерывной — влияет на максимальную продолжительность цикла испытаний.
– Возможная вариативность измерений — определяет потенциал для решения других измерительных задач, решение которых может потребоваться на испытательном стенде. Значение определено экспертным путем.
– Стоимость — один из основных параметров. Система измерений должна иметь как можно меньшую стоимость при соответствующих характеристиках.
Метод Гермейера заключается в сравнении нескольких альтернатив путем выведения интегрального критерия Гермейера. Данный критерий представляет собой сумму оценок альтернативы по каждому из критериев оценки. В качестве критериев оценки будет выступать качество соответствия каждой альтернативы параметрам, представленным выше.
Качество соответствия каждой из альтернатив выражается в долях от лучшего [4]. Среди всех значений параметра выбирается тот, который является наилучшим и относительного него определяется, в какой доле альтернатива соотносится с лучшей по следующей формуле:

Где X — значение параметра выбранной альтернативы в доле от лучшего;
X max — наивысшее значение параметра среди представленных альтернатив;
X i — значение параметра выбранной альтернативы.
Если наилучшим для параметра является его минимальная величина, например погрешность измерения измерительного канала или стоимость, то значения параметров сперва необходимо привести в вид, при котором его наилучшее значение станет максимальным, получив его обратное значение по следующей формуле:

В случае, если важность параметров, по которым происходит сравнение, не равна, то к каждому параметру возможно добавить весовой коэффициент, отображающий его важность для сравниваемых альтернатив. В таком случае формула (1) примет следующий вид:
Где K i — значение весового коэффициента.
Определить весовой коэффициент можно либо полностью экспертно, либо используя для этого методы сравнивания, такие как матрица N 2 .
Альтернатива считается более приоритетной, если интегральный критерий Гермейера для неё принимает наименьшее значение.
Проведем сравнение предложенных альтернатив между собой. Значения параметров, по которым происходит оценка, для каждой из альтернатив, представлены в таблице 3:
Таблица 3
Параметры возможных вариаций системы измерений
|
ТАХ |
ФОТ |
ЛАЗ |
ИНК |
Вес | |
|
Точность измерения угла отклонения, |’| |
0,06 |
0,002 |
0,0026 |
6 |
0,4 |
|
Частота регистрации параметров, Гц |
3,85 |
0,00065 |
0,0005 |
1000 |
0,4 |
|
Время беспрерывной работы, ч |
20 |
17,5 |
16 |
30 |
0,2 |
|
Возможная вариатив-ность измерений, % |
0 |
50 |
70 |
0 |
0,35 |
|
Стоимость, тыс. руб |
1448 |
2801 |
10185 |
285 |
0,5 |
Используя метод Гермейера, получаются следующие интегральные оценки альтернатив:
Таблица 4
|
ТАХ |
ФОТ |
ЛАЗ |
ИНК |
Вес | |
|
Точность измерения угла отклонения, |’| |
0,387 |
0,000 |
0,092 |
0,400 |
0,4 |
|
Частота регистрации параметров, Гц |
0,398 |
0,400 |
0,400 |
0,000 |
0,4 |
|
Время беспрерывной работы, ч |
0,067 |
0,083 |
0,093 |
0,000 |
0,2 |
|
Возможная вариативность измерений, % |
0,350 |
0,100 |
0,000 |
0,350 |
0,35 |
|
Стоимость, тыс. руб |
0,402 |
0,449 |
0,486 |
0,000 |
0,5 |
|
Интегральная оценка |
1,603 |
1,032 |
1,072 |
0,750 |
Как видно из имеющихся параметров реализаций систем, стандартные средства измерений типа тахеометров и инклинометров уже близко приближаются к пределу допускаемой погрешности измерений. При дальнейшем развитии техники и ужесточении требований к допускам измерений параметров они не смогут обеспечить измерения в заданных диапазонах величин.
Перспективными в этом отношении являются средства измерений на основе 3D-сканирования объектов. Их точность значительно выше, но при этом возникает сложность с обработкой результатов в связи с тем, что в процессе сбора информации на систему регистрации приходит объем информации выше, чем она способна оперативно обработать.
Особенности обработки результатов систем с большим числом результатов измерений
Основной особенностью использования систем 3D-сканирования является необходимость обработки данных о большом числе точек поверхности исследуемого объекта. Помимо того, что таких данных много, они также собраны с погрешностью системы сканирования, что накладывает трудности на обработку результатов.
Из-за встроенной в сканер погрешности измерений расстояние соответствующих измеренных точек будет отличаться, что будет приводить к ошибкам в процессе обработки результатов, если проводить обработку классическими методами. Для того, чтобы избежать таких проблем возможно использовать метод Монте-Карло, который заключается в наложении на объект или процесс множества случайно выбранных точек на определенную область, больше изучаемого объекта. Определяя количество попаданий случайных точек в область объекта, можно сужать эту зону до такого момента, пока она не совпадет с исследуемой до допустимой погрешности.
Применимо к нашей задаче, возможно определение расстояния до исследуемой точке путем множественного нанесения точек в область, определенного радиуса от неё.
Помимо этого, собранная информация может анализироваться не только в рамках решения задач анализа случайных величин, но также и случайных функций.
Анализ случайных функций позволяет оценивать, насколько стабилен исследуемый процесс. В рамках нашей задачи возможно определять на более раннем этапе, в штатном ли режиме функционирует система управления рулем высоты, а также оценивать изменение геометрических параметров руля высоты от воздействия на него эксплуатационных нагрузок.
Для этого необходимо оценивать автокорреляционную функцию случайного процесса во времени. Если процесс стационарен, т. е. его вероятностные и статистические характеристики не меняются во времени, автокорреляционная функция будет иметь следующий вид. Вид автокорреляционной функции представлен на рисунке 5.
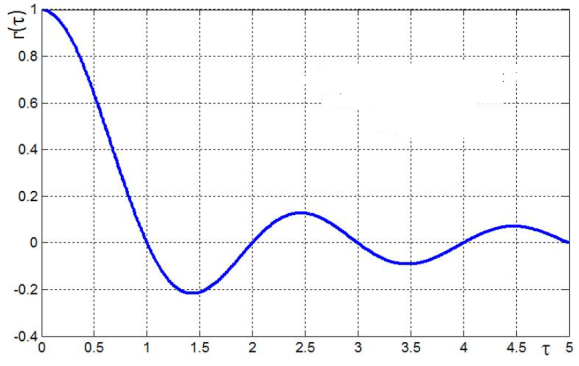
Рис. 5. Автокорреляционная функция случайного процесса
Это будет означать, что в процесс не было внесено каких-либо внешних изменений. Если же данная функция имеет необычные пики, то это будет означать, что в процессе произошел сбой и необходимо выявлять его причины.
Заключение
В статье был приведен обзор доступных для реализации системы измерения угла отклонения средств измерений, были представлены возможные варианты их реализации и проведен сравнительный анализ данных вариантов.
В ходе анализа альтернатив было выявлено, что применение инклинометров в качестве средства измерения для измерения угла отклонения аэродинамических поверхностей самолета является более предпочтительным.
Также в работе были предложены методы оценки множества полученных параметров в виде случайных параметров и случайных функций, а также какие выводы можно сделать на их основе.
Полученные в ходе написания статьи материалы применяются на практике в ПАО «Яковлев» для создания стенда функциональных испытаний хвостового оперения. На их основе проводятся работы по разработке системы измерений угла отклонения руля высоты самолета МС-21–310.
Литература:
- Чекрыжев Н. В. Самолёт Ан-124. Конструкция хвостового оперения — Самара: изд-во Самарского университета, 2016;
- Сердерович В. А. Наземное лазерное сканирование: монография / В. А. Сердерович, А. В. Комиссаров, Д. В. Комиссаров, Т. А. Широкова. — Новосибирск: СГГА, 2009;
- Груздева Е. А., Орлова Е. Ю. Применение цифровых технологий в изучении материальных объектов [Электронный ресурс] // Баландинские чтения, 2018 г. URL: https://cyberleninka.ru/article/n/primenenie-tsifrovyh-tehnologiy-v-izuchenii-materialnyh-obektov (дата обращения 23.09.2024);
- А. А. Бородкин, Г. А. Ефименко. Системный инжиниринг для поиска технических решений. Введение. Сборник лекций, 2019.

