В статье представлены результаты исследования возможностей применения технологии 3D-сканирования для контроля аэродинамической асимметрии (АА) крыльевого отсека управляемого летательного аппарата (ЛА). Показаны аспекты влияния асимметрии на точность наведения ЛА при различной угловой скорости вращения относительно продольной оси. Разработан алгоритм расчета параметров контроля АА. Представленная в работе методика получения 3D-модели реального изделия показывает высокую точность и возможность использования вместо традиционных механических средств контроля.
Ключевые слова: аэродинамическая асимметрия, геометрическая асимметрия, крыльевой отсек, 3D-сканирование, 3D-модель, точность наведения.
В инженерной практике известно, что на этапах проектирования, выполнения НИОКР, создания (изготовления) и производства специальных изделий — управляемых ЛА с аппаратурой высокоточного наведения — выдвигаются требования обеспечения контроля технологических процессов. Возникают задачи, относящиеся к сфере системного инжиниринга, в частности, задачи контроля качества производственных процессов по установке, монтажу и креплению крыльев ЛА. Важной операцией при этом является проверка соответствия требований к готовым изделиям и определение пригодности их к серийному производству [1].
Особенность разработки технологического процесса для изготовления конструктивных элементов и сборочных единиц изделия заключается в том, что в большинстве случаев выбор делается в пользу более технологичных и экономичных операций. Однако одним из недостатков такого подхода может быть снижение точности изготовления корпуса всего изделия. Это влечёт за собой возникновение таких отрицательных явлений, как аэродинамическая асимметрия планера управляемого ЛА.
Для изделий с крыльевым оперением АА зависит от точности соблюдения допусков на установку лопастей крыльев с проверкой отклонений от формы (плоскостности и прямолинейности), а также от номинальных габаритов самих лопастей. Такие факторы могут привести к снижению точности наведения ЛА (дорогостоящего изделия) при выполнении полёта.
Цель исследования — разработка методики точного контроля аэродинамической асимметрии крыльевого отсека ЛА и оценка влияния параметров асимметрии на точность наведения.
Объект исследования — конструкция крыльевого отсека управляемого ЛА.
Существующий метод определения величин геометрической асимметрии элементов крыльевого отсека (КО) c преобразованием их в контрольные аэродинамические показатели асимметрии базируется на определении угла установки лопастей по некоторым выбранным контрольным точкам. Операция выполняется с помощью механических измерительных средств. В большинстве случаев такой метод не позволяет провести необходимые полные и точные измерения. Он не обеспечивает выявление геометрической асимметрии планера целиком с учетом неровности поверхностей крыльев и отклонений от номинальных размеров. Это может влиять на точность определения показателей компенсации момента АА.
В этой связи возникает потребность создания высокоточной системы контроля параметров АА крыльевых отсеков управляемых ЛА с возможностью замера параметров по всей поверхности с учётом плоскостных неровностей лопастей КО после сварки и нивелировки, с общей погрешностью измерения, не превышающей 0,05 мм.
Для реализации идеи и требований по обеспечению полного и точного контроля параметров АА может использоваться специальный прибор — 3D-сканер.
В работах [2, 3, 4] показано, что применение устройства 3D-сканирования позволяет получать сведения о форме поверхностей, отклонениях и дефектах и структуре объектов, сохраняя данные в цифровом виде. Принцип действия прибора — получение координат множества точек с помощью датчиков, фиксирующих угловое перемещение и изменение расстояний до выбранного объекта. Погрешность сканирования может составлять до 0,03 мм, что удовлетворяет требованиям по точности измерений при контроле изготовления и установки крыльевых узлов на летательных аппаратах.
Для определения АА крыльевых отсеков ЛА с помощью технологии 3D-сканирования предлагается следующий алгоритм действий.
- Выбирается лазерный 3D-сканер, погрешность измерений у которого не превышает 0,05 мм.
- Проводится калибровка 3D-сканера для подтверждения точности измерений на поверочных макетах.
- Поверхность КО покрывается тонким слоем специального спрея (на основе талька) для повышения отражательной способности.
- Осуществляется процесс лазерного сканирования при задании максимального количества точек определения координат на поверхностях каждого элемента КО.
- Массив точек-координат обрабатывается и упрощается с помощью специализированной программы Metrolog X4, обеспечивающей сохранение данных сканирования и формирование облака точек.
- Подготовленное облако точек-координат экспортируется в программный комплекс SolidWorks, где производится преобразование облака в первичную полигональную сетку.
- Из первичной полигональной сетки «извлекаются» данные о поверхности, которые посредством графического моделирования преобразуются в так называемую полноценную твердотельную 3D-модель КО.
- Проводится калибровка отклонений 3D-модели от первичного облака точек, отсканированного КО.
- 3D-модель экспортируется в программный комплекс Ansys Fluent, где производится сравнительный анализ численных экспериментов по обтеканию отсканированной и исходной (номинальной) 3D-моделей — решается задача определения параметров АА крыльевого отсека.
- Полученные значения сил АА преобразуются в эквивалентные углы атаки и скольжения, а также в эквивалентные углы отклонения рулей.
Для анализа влияния АА в данной работе использовался ЛА, выполненный по аэродинамической схеме утка с «+» образным расположение крыльев, рулей, двигающийся в пространстве за счёт действия реактивной тяги.
На рис. 1 показаны направления действия нормальных (Y) и боковых (Z) сил, образующихся вследствие наличия угла установки крыльев (значения α балансировочного угла атаки и β балансировочного угла скольжения равны нулю).
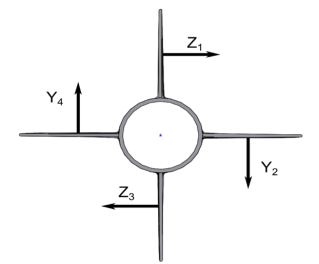
Рис. 1. Схема направления действия сил, образующихся вследствие наличия угла установки крыльев
Значения величин нормальных и боковых сил при моделировании полета ЛА с четырьмя лопастями приведены в таблице 1.
Таблица 1
Результаты моделирования в Ansys Fluent отсканированной модели КО
|
Скорость потока, число Маха |
1 |
2 |
3 |
4 |
5 |
5,5 |
|
|
– 3,71 |
– 13,77 |
–25,34 |
– 43,32 |
– 57,70 |
– 65,89 |
|
|
2,45 |
11,32 |
22,48 |
39,80 |
53,50 |
60,31 |
|
|
– 4,67 |
– 13,25 |
–28,77 |
– 50,37 |
– 65,69 |
– 73,38 |
|
|
0,39 |
6,56 |
17,85 |
33,96 |
46,02 |
52,09 |
|
Асимметрия
|
– 0,90 |
– 1,46 |
–2,39 |
– 3,95 |
– 4,91 |
– 5,58 |
|
Асимметрия
|
– 4,28 |
– 6,69 |
–10,92 |
– 16,41 |
–19,67 |
– 21,29 |






По результатам моделирования отсканированной геометрии КО, максимальная АА при

Для оценки влияния АА на значение балансировочного угла атаки были проведены расчеты с использованием известных зависимостей [5, 6]:
|
|
(1) |
|
|
(2) |
|
|
(3) |
|
|
(4) |

где

















Результаты расчетов сведены в таблицу 3 в виде дополнительных расчетных углов атаки и скольжения, вычисленные по формуле (1,3), вызванных наличием АА, которые для последующего моделирования траектории полета переведены с использованием балансировочного отношения (2,4) в эквивалентные углы отклонения органов управления.
Таблица 2
Значения балансировочного угла атаки для исходной и отсканированной модели КО
|
Скорость потока, число Маха |
1 |
2 |
3 |
4 |
5 |
5,5 |
|
|
0,049 |
0,010 |
0,009 |
0,010 |
0,009 |
0,009 |
|
|
0,240 |
0,047 |
0,042 |
0,042 |
0,037 |
0,036 |
|
Эквивал.
|
0,031 |
0,016 |
0,018 |
0,022 |
0,020 |
0,021 |
|
Эквивал.
|
0,148 |
0,073 |
0,079 |
0,089 |
0,085 |
0,083 |




Результаты моделирования процесса баллистического полёта ЛА с учетом АА при угле пуска от θ = 10 и угловой скорости крена Wx, равной 22,4 об/с, показаны на графиках рис. 2.
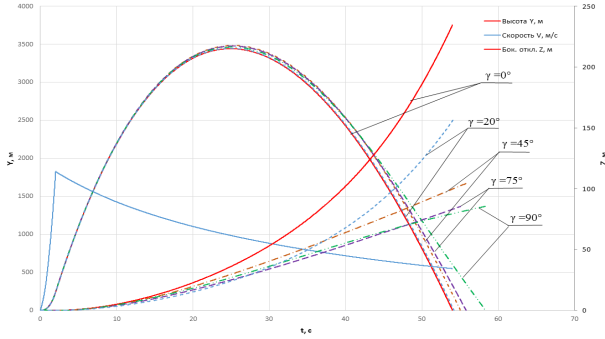
Рис. 2. Результаты моделирования баллистического полета управляемого ЛА с учетом АА
Порядок выполнения 3D-сканирования и методика расчётов параметров траектории полёта ЛА с учетом АА позволяет проводить многовариантные расчёты и сравнительный анализ величин. Результаты расчётов для вариантов условий полёта ЛА — варьировалась частота вращения ЛА по крену для определения скорости, при которой асимметрия КО будет оказывать существенное влияние, показаны на графике рис. 3.
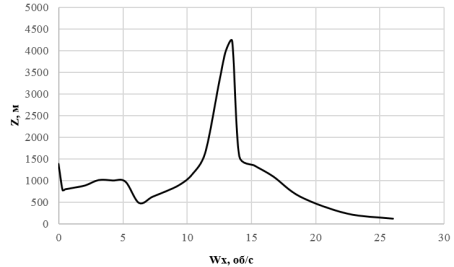
Рис. 3. Зависимость бокового отклонения с учётом воздействия АА от угловой скорости вращения ЛА (угол пуска от θ = 10)
График рис. 3 показывает, что боковое отклонение стабилизированного по крену ЛА может составлять 1400 м, при этом в диапазоне угловых скоростей крена от 0 до 5 об/с наблюдается снижение отклонения до 900–1000 м. После 15 об/с наблюдается постоянное снижение бокового отклонения до 250 м при угловой скорости крена равной 23 об/с.
При корректировке скорости вращения ЛА в диапазоне от 10 до 15 об/с может наблюдаться такое явление, как сближение с собственной частотой колебаний, из-за чего проявляется эффект резонанса, увеличивающий амплитуду колебаний летательного аппарата в несколько раз. Это приводит к возрастанию отклонения от номинальной (расчётной) траектории полёта, поэтому рассматривать результаты (при возникновении резонанса) нецелесообразно. Для исключения явления резонанса на траектории полёта частота вращения летательного аппарата по крену обычно разносится относительно собственной аэродинамической частоты [7, 8].
Некоторые перспективные высокоскоростные и управляемые ЛА в связи с особенностями функционирования рулевых приводов, головок самонаведения, бортовой электронной аппаратуры стабилизируются по крену или же имеют низкую угловую скорость вращения относительно продольной оси — от 0 до 5 об/с. В связи с этим, как показано на графиках рис. 2 и 3, влияние АА на точность наведения может оказаться значительным. Для компенсации АА крыльевого отсека ЛА может потребоваться процедура последующей коррекции его полёта путём составления и отработки специального программного обеспечения бортовой аппаратуры.
Заметим, что возможна также доработка КО после ЗD-сканирования методом регламентированного деформирования лопастей. В этом случае определяют величины доработки каждого крыла исходя из результатов численного моделирования. Далее приступают к деформированию крыльев. Труба КО фиксируется в приспособлении с помощью цанговых зажимов и откидных болтов. На край крыла надевают накладную колодку, на которой фиксируют регулируемые опоры. Над реперными точками устанавливаются индикаторы. Манипулируя ключом, заворачивая или отворачивая втулку подвижной опоры, перемещают колодку вниз (вверх), тем самым изгибают крыло до тех пор, пока разница между показаниями индикаторов не составит расчетную допустимую величину.
Таким образом, разработанный и апробированный алгоритм 3D — сканирования показал хорошую точность и возможность применения не только для контроля АА, но и для изготовления крыльевых отсеков управляемых ЛА при отсутствии специальной оснастки, которая необходима для точных и скоростных измерений.
Методика контроля аэродинамической асимметрии крыльевого отсека с помощью технологии лазерного 3D-сканирования позволяет «перевести» реальное изделие в 3D-модель с учетом производственных допусков и неточностей изготовления лопастей. С помощью специализированных компьютерных программ более точно определяются геометрические, аэродинамические, баллистические характеристики изготавливаемых ЛА. Методика, реализованная в виде специального программного пакета, может позволить проводить оценку влияния АА на точность наведения ЛА при различных параметрах угловой скорости её вращения.
Разработанная методика пригодна для использования в инженерно-технологических разработках и выработки рекомендаций по учёту и устранению влияния аэродинамической асимметрии крыльевых отсеков изготавливаемых и перспективных ЛА.
Литература:
- Орлов, П. И. Основы конструирования [Текст]: справочно-методическое пособие в 2-х кн. Кн.1 / П. И. Орлов; под ред. П. Н. Учаева. — 3-е изд., исправл. — М.: Машиностроение, 1988. — 560с.
- Карасика В. Е., Бокшанский В. Б. Лазерные приборы и методы измерения дальности. — М.: МГТУ им. Н. Э. Баумана, 2012. — 92 С.
- Сивухин Д. В. Поглощение света и уширение спектральных линий. Общий курс физики. — М.: Наука, 2005. — 612 С.
- Парфенов В. А., Редька Д. Н., Лазерное 3D-сканирование. — СПб.: ГЭТУ «ЛЭТИ», 2016. — 20 С.
- Краснов Н. Ф. Аэродинамика. Основы теории. Аэродинамика профиля и крыла. — М.: Высшая школа, 1976. — 383 с.
- Голубев А. Г., Калугин В. Т. Аэродинамика. — М.: МГТУ им. Н. Э. Баумана, 2010. — 688 с.
- Лебедев А. А., Чернобровкин Л. С. Динамика полета беспилотных летательных аппаратов. — М.: Машиностроение, 1973. — 617 с.
- Лебедев А. А., Герасюта Н. Ф. Баллистика ракет. — М.: Машиностроение, 1970. — 244 с.

