В данной статье автор составляет структурную схему и алгоритм функционирования тягового электропривода для электробуса.
Ключевые слова: тяговый электропривод, асинхронный двигатель, аккумуляторная батарея, преобразователь частоты, электробус.
Воспользуемся таким документом, как ГОСТР 50369–92 «Электроприводы. Термины и определения». Из него следует, что электропривод — электромеханическая система, состоящая из электродвигательного (ЭДУ), преобразовательного (ПрУ), передаточного (ПУ) и управляющего устройств (УУ), предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. Где рабочая машина — машина, осуществляющая изменение формы, свойств, состояния и положения предмета труда. Исполнительный орган рабочей машины (ИОРМ) — движущийся элемент рабочей машины, выполняющий рабочую операцию [2]. В данном проекте рабочая машина является колесной машиной. Поэтому далее рассмотрим такой документ, как ГОСТ 17513–72 «Электропривод колесных машин тяговый». Там указывается, что тяговый электропривод колесной машины — электропривод, предназначенный для приведения в движение колесной машины. Где колесная машина является электробусом, а исполнительным органом электропривода — колеса электробуса.
Исходя из определений, электропривод необходим для преобразования электрической энергии в механическую энергию и управления этим преобразованием. В данную систему будут входить следующие элементы:
– орган управления — управляющее устройство, которым является электронный блок управления;
– рабочий орган — передаточное устройство, которым является редуктор;
– двигатель будет включать в себя преобразовательное устройство и электродвигатель.
Так как данный электропривод является тяговым и установлен в электробусе, представим следующие элементы, взаимодействующие с электроприводом:
– источник энергии — тяговая батарея;
– внешнее управление — панель приборов;
– объект воздействия — исполнительный орган, которым являются колеса [1].
Рассмотрим вышеперечисленные элементы подробнее. Электродвигатель — электромеханический преобразователь, предназначенный для преобразования электрической энергии в механическую. В данном электроприводе используется два электродвигателя, которыми являются трехфазные асинхронные двигатели. Объектом воздействия является передаточное устройство. Преобразовательное устройство — электротехническое устройство, преобразующее электрическую энергию с одними значениями параметров и/или показателей качества в электрическую энергию с другими значениями параметров и/или показателей качества. Таким устройством является преобразователь частоты. Объектом воздействия является электродвигатель. Передаточное устройство — механический преобразователь, предназначенный для передачи механической энергии от электродвигателя к исполнительному органу рабочей машины и согласованию вида и скоростей их движения. Им является редуктор, установленный на каждый электродвигатель. Объектом воздействия является исполнительный орган, то есть колесо. Управляющее устройство — устройство, предназначенное для формирования управляющих воздействий в электроприводе. В данном случае таким устройством является электронный блок управления (ЭБУ).
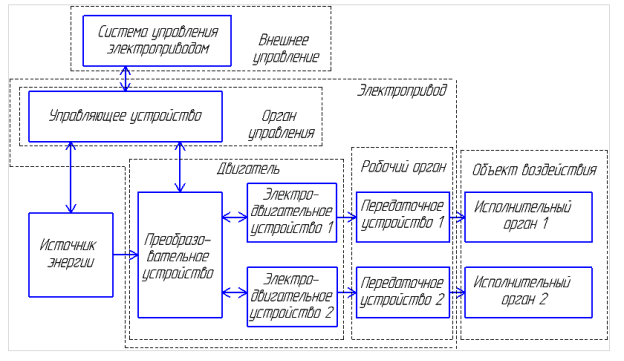
Рис. 1. Структурная схема взаимосвязей элементов электропривода и внешних элементов
Объектом воздействия является преобразовательное устройство и электродвигатель. Тяговая батарея служит источником энергии для электропривода. Она включает в себя комплект аккумуляторных батарей. Внешнее управление — внешняя по отношению к электроприводу система управления более высокого уровня, поставляющая необходимую для функционирования электропривода информацию. Исполнительный орган данного электропривода — колесо, с помощью которого осуществляет движение электробус. Взаимосвязи вышеперечисленных элементов покажем на схеме, приведенной на рисунке 1.
Алгоритм функционирования тягового электропривода приведен на рисунке 2.
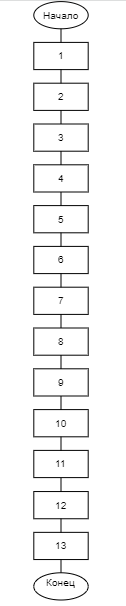
Рис. 2. Алгоритм функционирования тягового электропривода
Данный алгоритм показывает работу тягового электропривода, а именно запуск электродвигателя.
Расшифруем обозначения, использованные в алгоритме:
1 — Пуск электроснабжения электробуса;
2 — Обработка сигналов датчиков обратной связи;
3 — Идентификация параметров электродвигателя 1 и электродвигателя 2;
4 — Формирование на панели приборов информации о состоянии электродвигателей;
5 — Задание режима движения электробуса;
6 — Формирование сигналов электронным блоком управления;
7 — Обработка сигналов преобразователем частоты;
8 — Формирование сигналов преобразователем частоты на электродвигатели;
9 — Механическая передача от вала электродвигателя 1 и вала электродвигателя 2 на редуктор 1 и редуктор 2 соответственно;
10 — Формирование вращения колеса 1 и колеса 2;
11 — Обработка сигналов датчиков обратной связи;
12 — Идентификация параметров электродвигателя 1 и электродвигателя 2;
13 — Формирование на панели приборов информации о состоянии электродвигателей.
Литература:
- Ефремов И. С., Пролыгин А. П., Андреев Ю. М., Миндлин А. Б. Теория и расчет тягового привода электромобилей / Высшая школа, 1984.- 383с.
- Вольдек А. И. Учебник Электрические машины. Учебник для студентов высш. техн. учебн. заведений. — 3-е изд., перераб.- Л.: Энергия, 1978. — 832 с.

