В данной статье автор рассматривает возможности распознавания динамограмм с помощью глубоких нейронных сетей. Для анализа изображений динамограмм используются такие типы слоев как сверточный слой и слой LSTM. По итогу разработана модель нейронной сети, способная с довольно высокой точностью распознавать осложнения и неисправности по динамограмме во временном разрезе, анализирую серию динамограмм.
Ключевые слова: динамограмма; нейронные сети; распознавание.
In this article, the author considers the possibility of recognition of dynamograms using deep neural networks. For image analysis dynamometer cards are used this types of layer is like a convolutional layer and a layer of LSTM. As a result, a model of the neural network is developed, which is able to recognize complications and malfunctions with a fairly high accuracy on the dynamogram in the time section, analyze a series of dynamograms.
Keywords: dynamograms; neural networks; recognition.
Актуальность. Информационные технологии на сегодняшний день развиваются столь стремительно, будто по экспоненциальному закону. Соответственно, на данный момент практически не осталось сфер деятельности, так или иначе не связанных с информационными технологиями. Нефтегазовая промышленность не исключение. На сегодняшний день главный вектор развития направлен на ускоренную «оцифровку» нефтегазовой индустрии, в первую очередь на автоматизацию производства и снижения так называемого «человеческого фактора» и соответственно уменьшения вероятности ошибки. Технологии, разработанные на основе нейронных сетей и искусственного интеллекта способны снизить риск возникновения ошибок на производстве.
Введение. Основу добывающей промышленности составляют штанговые насосные установки, однако в настоящее время все больше на новых месторождениях устанавливается УЭЦНы[1] в виду того, что дебит на них гораздо выше при равных затратах электроэнергии. Установки СШНУ[2] устанавливаются либо на малодебитных скважинах, либо в тех скважинах, у которых в добываемой жидкости процент механических примесей настолько высок, что не позволяет произвести установку ЭЦН[3] и производить его дальнейшую эксплуатацию без риска вывести его из строя раньше положенного срока. Отсюда следует, что СШНУ установки устанавливаются там, куда УЭЦН установить не выгодно.
Для людей занимающимися мониторингом неисправностей, необходимо знать в какой момент времени возможен отказ насосной установки, либо ее ухудшение работы, которое мало сказывается на дебите жидкости, но может иметь серьезные последствия, если не принять меры вовремя. Поэтому для предотвращения выхода из строя скважины, и соответственно экономических потерь, важно вовремя выявить аномальную работу оборудования скважины.
Используя возможности нейронных сетей для анализа динамограмм[4] СШНУ можно идентифицировать осложнения и неисправности на начальном этапе их проявления.
Цель исследования. Целью данной работы является разработка нейросетевой модели, способной корректно идентифицировать осложнения и неисправности СШНУ по графику динамограммы [1, 5]. Для достижения это цели необходимо решить следующие задачи:
- Обзор и анализ существующих нейросетевых моделей идентификации осложнений на динамограмме
- Разработка модели нейронной сети
- Анализ результатов работы и формирование выводов
Обзор ианализ существующих методов. Приведем краткую характеристику основных методов решения поставленной задачи, основанных на использовании искусственных нейронных сетей. Для решения задачи распознавания образов динамограммы имеются следующие известные методики, использующие нейросетевой подход к классификации динамограмм:
− Методика распознавания, основанная на использовании матричного представления, двуслойный перцептрон (класс многослойный перцептрон) [2,3]
− Методика Оганезова, многослойный перцептрон [4]
Данные методы основаны работе с изображением, полученным из исходных данных точек динамограммы, в фиксированный момент времени без сохранения информации о предыдущих состояниях. Таким образом теряется некоторая немаловажная информация для выявления осложнений и неисправностей: последовательное изменение динамограммы во времени.
Методы решения задач, подразумевающих обработку во времени (классификация видеорядов, классификация речи), как правило, используют передовые достижения в области машинного обучения, в частности сверточные слои, LSTM слои, которые могут быть применены для повышения точности классификации и возможности классификации осложнений, проявляющихся во времени, а также переходных состояний.
Разработка модели нейронной сети.
В связи с тем, что размерность матрицы входных данных мы будем подбирать экспериментально, то использование полносвязных входных слоев НС использовать было бы накладно, поэтому для входного анализа будем использовать сверточные слои (CNN) из-за их особенности работы с большими матрицами входных данных с постепенным уменьшением размерности [6].
Далее, существуют осложнения, которые проявляются со временем, то есть за несколько полных циклов работы погружного оборудования: превышение подачи установки над притоком и т. д. Для того, чтобы сеть имела возможность обучаться на серии образов динамограмм, необходимо использовать рекуррентные типы слоев (RNN, LSTM) с результирующей модели [7]. Таким образом, основными компонентами модели являются: сверточные слои и рекуррентные слои нейронной сети.
Представим модель будущей нейронной сети с учетом вышеизложенных соображений. В начальном приближении схема следующая:
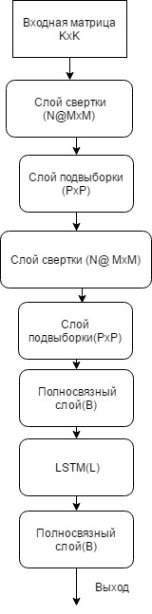
Рис. 1. Общая структура модели нейронной сети
Количество слоев структуры модели нейронной сети на данный момент не является конечным и будет определяться посредством селекции моделей.
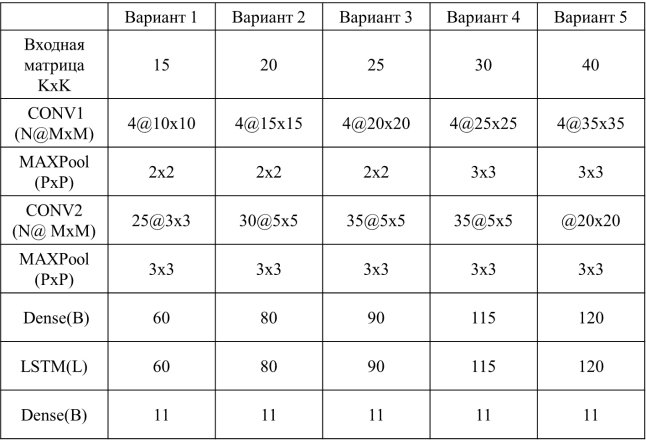
В ходе экспериментов требуется определить наилучшую архитектуру нейронной сети, изменяя следующие характеристики: количество слоев в сверточной части, возможно их порядок, размер матрицы входных данных, количества последовательно соединённых рекуррентных слоев.
В качестве функции потери выбрана crossentropy. Метод оптимизации при обучении нейронной сети — Adam.
Таблица 1
Параметры анализируемых сетей, участвующих вселекции
Результаты селекции.
Результаты селекции представлены в следующей таблице:
Таблица 2
Результаты селекционирования
|
Свойства сети |
Количество Эпох обучения ивремя на 1 эпоху(сек) |
Ошибка на обучающей выборке,% |
Ошибка на тестовой выборке, % |
Ошибка на валидац. Выборке, % |
Размер сети, мб |
Время на распознавание 1 образа, мс |
|
Вариант 1 |
4(62) |
99 |
100 |
100 |
120 |
0,15 |
|
23(62) |
86 |
88 |
80 | |||
|
48(62) |
70,9 |
30,5 |
50 | |||
|
122(62) |
20,8 |
45 |
81 | |||
|
Вариант 2 |
4(72) |
96 |
99 |
99 |
189 |
0.18 |
|
20(72) |
81 |
80 |
90 | |||
|
42(72) |
58,5 |
40 |
48,9 | |||
|
120(72) |
19 |
20,8 |
19 | |||
|
186(72) |
12,9 |
12 |
9 | |||
|
225(72) |
10,8 |
7 |
19 | |||
|
Вариант 3 |
3(102) |
82 |
89 |
90.9 |
246 |
0.18 |
|
60(102) |
50 |
49 |
58 | |||
|
110(102) |
26 |
28 |
25,8 | |||
|
190(102) |
10,2 |
8 |
16,2 | |||
|
Вариант 4 |
4(124) |
96 |
99 |
99 |
348 |
0.22 |
|
21(124) |
81 |
80 |
90 | |||
|
38(124) |
58,5 |
40 |
48,9 | |||
|
108(124) |
19 |
20,8 |
19 | |||
|
145(124) |
12,9 |
12 |
29 | |||
|
Вариант 5
|
4(161) |
96 |
99 |
99 |
409 |
0.25 |
|
20(161) |
81 |
80 |
90 | |||
|
40(161) |
58,5 |
40 |
48,9 | |||
|
120(161) |
29 |
20,8 |
17,9 |
Анализ результатов.
Проанализируем полученные результаты. Главными критериями являются: количество эпох обучения и ошибка на валидационной выборке, так как необходимо подобрать такие параметры сети, при которых достигаются приемлемые результаты распознавания за минимальное время, не допуская переобучения. В проведенных экспериментах переобучение сетей наступало при разных количествах проведенных эпох, а именно после последнего зафиксированного количества эпох обучения эксперимента. Всего было проведено 5 экспериментов, результаты которых приведены в таблице 2.
Исходя из результатов проведенных экспериментов можно заключить, что наиболее удачной является сеть № 3, так как имеет наилучшие результаты распознавания (16,2 % ошибки на валидационной выборке) за минимальное количество затраченных эпох на обучение (95 эпох, где на каждую тратилось 105 секунд времени).
Заключение.
Предложена новая модель нейронной сети, которая распознает осложнения и неисправности погружного насосного оборудования скаженных штанговых насосных установок с точностью 83.8 % на валидационной выборке с возможностью распознавания осложнений, проявляющихся во времени за счет анализа серии входных данных.
Результаты вычислительных экспериментов показали правильность предложенных идей по решению поставленной задачи.
Литература:
- Садов, В.Б. определение дефектов оборудования нефтяной скважины по динамограмме / В. Б. Садов // Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». — 2013. — Вып. 13. — № 1 (294). — С. 11–16.
- Зюзев, А. М. Система диагностики штанговой глубинно-насосной установки на основе нейронной сети / А. М. Зюзев, А. В. Костылев // «Проектирование научных и инженерных приложений в среде MATLAB»: тр. Всерос. науч. конф. — М.: ИПУ РАН, 2004. — С. 1266–1272.
- Мансафов, Р. Ю. Новый подход к диагностике работы УСШН по динамограмме / Р. Ю. Мансафов // Инженерная практика. — 2010. — № 9. — С. 82–89.
- Алиев, Т. М. Автоматический контроль и диагностика скважинных штанговых насосных установок / Т. М. Алиев, А. А. Тер-Хачатуров. — М.: Недра, 1988. — 232 с.
- Белов, И. Г. Исследование работы глубинных насосов динамографом / И. Г. Белов. — М.: Гостоптехиздат, 1960. — 126 с.
- Методы оптимизации нейронных сетей [Электронный ресурс]: https://habrahabr.ru/post/318970/ (дата обращения 14.01.17)
- Классификация текстов [Электронный ресурс]: https://ru.wikipedia.org/wiki/F_LSTM (дата обращения 14.01.17)
- Обзор топологий глубоких сверточных нейронных сетей [Электронный ресурс]: https://habrahabr.ru/company/mailru/blog/311706/ (дата обращения 16.01.17)
- Использование сверточных сетей для поиска, выделения и классификации [Электронный ресурс]: https://habrahabr.ru/company/recognitor/blog/277781/ (дата обращения 16.01.17)
- Применение нейросетей в распознавании изображений [Электронный ресурс]: https://geektimes.ru/post/74326/ (дата обращения 16.01.17)
[1] УЭЦН - установка электропогружного центробежного насоса
[2] СШНУ - скважинная штанговая насосная установка
[3] ЭЦН – электропогружной центробежный насос
[4] Динамограмма - график изменения нагрузки в точке подвеса насосных штанг в зависимости от их перемещения при глубинно насосной эксплуатации нефтяных скважин. Динамограмма регистрируется либо переносным прибором - динамометром, либо дистанционно в телединамометрической системе диспетчерского контроля. Форма динамограммы при нормальных условиях работы насоса близка к параллелограмму. По отклонению геометрии фактической динамограммы от нормальной судят о нарушении работы насоса.[2]

