Для обоснования выбора методологического обеспечения процесса проектирования систем управления (СУ), основанных на знаниях, необходима конкретизация признака «интеллектуальности» системы.
В теории искусственного интеллекта сформулированы понятия систем управления, обладающих свойствами «интеллектуальности в большом» [1]. В этом случае предполагается, что система имеет многоуровневую иерархическую структуру со следующими горизонтами (в порядке понижения ранга): обучения, самоорганизации, прогноза событий, баз событий и знаний, формирования решений, планирования операций по реализации сформированного решения, адаптации и исполнительного уровня. На самом нижнем горизонте используются традиционные системы регулирования. Остальные уровни реализуют эффективные информационные технологии работы со знаниями, существенно расширяющие возможности модели объекта управления и, следовательно, повышающие качество функционирования системы. Минимальная структура, сохраняющая свойство системы — «интеллектуальность в малом» — может содержать базу знаний, формирователь решений и исполнительный контур. Развитие признаков указанных свойств «интеллектуальности» в разрабатываемых СУ любого динамического объекта (ДО) требует реализации следующей последовательности проектирования:
− приобретение априорных знаний об объекте управления и условиях его функционирования;
− представление знаний с учетом выбранного формализма неточности и неопределенности;
− синтез алгоритмов принятия решений и формирования управления на основе технологии активных экспертных систем с использованием моделей декларативных и процедурных знаний;
− анализ качества управления ДО с интеллектуальной СУ по результатам имитационного моделирования с учетом недостоверности знаний;
− аппаратная реализация интеллектуального управляющего устройства на основе применения производительных вычислительных сред, построенных с использованием технологий последующих поколений компьютеров.
Приобретение знаний о ДО и условиях его функционирования предполагает составление описательной модели с анализом всех возможных ситуаций, в том числе и аварийных. Обязательно описание сценариев развития и смены ситуаций. В модели выделяются все информационные объекты, которые характеризуются неточностью и неопределенностью. Все априорные сведения объединяются в базу знаний на основе выбранной модели их представления.
Эффективной формой построения базы знаний является модульная конструкция, управляемая образцами [2]. За образцы выбираются эталонные ситуации функционирования ДО. Каждой ситуации соответствует фреймовая конструкция, содержащая в слотах процедуры расчета сил и моментов, действующих на ДО, и определения текущих кинематических параметров. В базе данных содержатся численные значения параметров с указанием их степени неопределенности. Рациональным формализмом неточности и неопределенности информации для рассматриваемой методологии является нечеткое множество, предложенное Л. А. Заде [3]. В этом случае характеристикой неточности и неопределенности служит функция принадлежности нечеткого множества. Описание перемещения в пространстве ДО зависит от уровня структурной неопределенности модели движения и может быть построена на основе одной из известных форм моделей [4]: детерминированной, недетерминированной, стохастической и нечеткой. Для первых трех форм удобно использование формализма динамики систем твердых тел, который учитывает сложность конструкции перспективных объектов управления. Для четвертой формы состояние ДО может быть описано нечеткими дифференциальными включениями и логико-лингвистическими моделями [5]. Для построения данных моделей используются методы имитационного моделирования состояния ДО в сочетании с технологиями экспертных систем. Алгоритм управления для каждой эталонной ситуации проектируется на основе методологии построения активных нечетких экспертных систем. Ядром процедуры формирования команд является база знаний с набором продукционных правил. Ее заполнение осуществляется на основе моделирования эталонных ситуаций с учетом принятых неопределенностей и решением оптимизационной задачи для выбранного критерия отличия формируемых траекторий движения от желаемых. Учитывая комбинаторный характер задачи целесообразно построение эволюционных систем проектирования баз знаний. Результатом проектирования является система нечетких продукционных правил и фреймовые формы представления соответствующих функций принадлежности. В качестве процедуры нечеткого вывода из системы знаний рационально применение композиционного правила, реализованного на основе мер возможности. Для перехода от нечеткой формы многомерного выхода контроллера к четкой целесообразно применение метода «центра тяжести». Открытость СУ ДО обеспечивается включением процедур самонастройки и самоорганизации на основе моделей нечеткого автомата. Вариант структуры интеллектуальной системы управления ДО, учитывающий особенности рассматриваемого подхода, приведен на рис. 1. В данном случае базовые свойства интеллектуальности поддерживаются на аппаратно-программном уровне в бортовом вычислительном управляющем устройстве. Это обеспечивается программной реализацией таких алгоритмических элементов как:
− синтез текущей цели управления на основе заданной мотивации;
− генерация задач управления, успешное решение которых обеспечивает достижение текущей цели управления;
− решатель задач, в котором формируются алгоритмы преобразования входной информации в результат решения требуемой задачи с применением информационных технологий баз знаний;
− формирователь команд, в котором результаты решения задач интерпретируются в виде команд управления, подаваемых в исполнительную систему;
− самоорганизация, самонастройка, самообучение, обеспечивающие открытость системы, необходимую для текущего совершенствования алгоритмов решения задач;
− прогноз, который позволяет при решении задач учитывать перспективу изменения свойств объекта и внешней среды.
Минимально необходимыми элементами системы управления являются решатель и формирователь команд. В этом случае свойство интеллектуальности СУ обеспечивается в решателе на алгоритмическом уровне с применением технологий баз знаний.
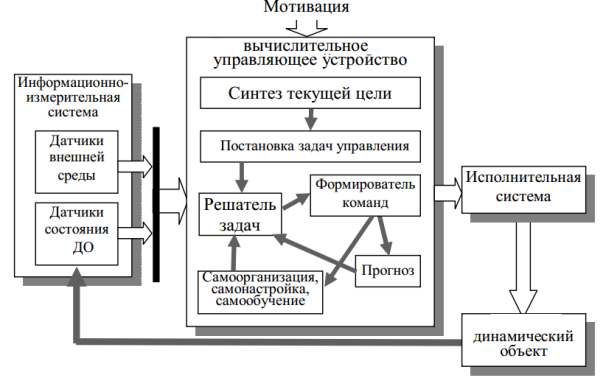
Рис. 1. Интеллектуальная система управления ДО
Анализ качества процесса управления, реализуемого с помощью интеллектуальной системы, предполагает решение задачи имитационного моделирования замкнутой СУ ДО с учетом принятых формализмов неточности и неопределенности информации [6]. Функционирование объекта представляется сценарием изменения ситуаций с описанием их информационных особенностей. В базе знаний, построенной на основе модели, управляемой образцами, оценивается мера сходства нечеткой текущей ситуации с эталонной из заданного множества. В качестве меры сходства нечетких ситуаций рационально использовать степень нечеткого включения [7]. В нечетких ситуациях рационально использовать степень нечеткого включения [8]. В соответствии с выбранной ситуацией в соответствующем алгоритме управления формируется команда управления. Текущая оценка показателя качества управления характеризует достигнутый уровень эффективности. Для аппаратной реализации интеллектуальных управляющих устройств в СУ ДО целесообразно применение бортовых вычислительных сред, построенных на нечетких нейропроцессорах [9]. Такая архитектура может содержать блок нечеткой памяти, обеспечивающий хранение нечетких слов (дискретное представление функции принадлежности нечеткого множества), набор машин нечетких выводов с поддержкой композиционного правила и блоки преобразования нечетких величин в четкие. Другим возможным подходом к аппаратной поддержке свойств интеллектуальности системы является применение бортовых вычислительных систем с программируемой архитектурой и реализация на них структуры нейронных сетей. Это обеспечивает рациональное использование внутреннего параллелизма, присущего нечетким продукционным моделям алгоритмов управления интеллектуальным контроллером, для повышения производительности вычислительной системы. Эффективным вариантом такого решения является многослойная нейронная сеть с формированием матрицы синапсов на основе применения метода обратного распространения ошибки. Обучение сети ведется по известной входной и выходной информации, получаемой по результатам имитационного моделирования СУ ДО.
Рассмотренный подход к методологии синтеза интеллектуальных систем управления является достаточно универсальным для проектирования СУ ДО различного назначения. Он объединяет в себе принципы традиционного синтеза СУ, разрабатываемые в рамках классической теории управления, и эффективные информационные технологии работы со знаниями, предлагаемые современным искусственным интеллектом. Практическая реализация такого подхода позволяет:
− компенсировать за счет повышения степени интеллектуальности СУ влияние на качество процесса управления неточности и неопределенности информации, используемой как на этапе проектирования системы, так и в процессе ее функционирования;
− целесообразность применения в качестве бортовых вычислительных сред ДО компьютеров последующих поколений и формировать алгоритмические основы проектирования для них программного обеспечения.
Изложенный подход позволяет наметить некоторые направления дальнейшего развития интеллектуальных СУ ДО:
− конкретизация в вычислительном аспекте понятия категории интеллектуальности алгоритмов управления ДО и формализуемого на ее основе принципа интеллектуальности с учетом реализации алгоритмов в бортовых вычислительных системах с архитектурой и элементной базой компьютеров следующих поколений;
− математическое описание новых классов моделей алгоритмов управления, учитывающих свойства неточности и неопределенности используемой при их синтезе информации, которые формализуются в терминах нечетких мер;
− создание комплексов программной поддержки методов анализа и синтеза интеллектуальных систем управления ДО при нечеткой информации;
− разработка программно-аппаратного интерфейса для сопряжения бортовых вычислительных систем новых поколений с элементами систем управления различных ДО. Изложенные принципы работы могут быть использованы для проектирования алгоритмического обеспечения интеллектуальных систем принятия решений и управления по нечеткой исходной информации для различных ДО.
В настоящее время проблема проектирования систем автоматического управления динамическими объектами характеризуется переходом от парадигмы адаптивного управления к парадигме интеллектуального управления. Это вызвано как непрерывным усложнением объектов управления и условий их функционирования, появлением новых классов вычислительных средств (в частности, распределенных вычислительных систем), высокопроизводительных каналов телекоммуникаций, так и резким повышением требований к надежности и эффективности процессов управления в условиях существенной априорной и апостериорной неопределенности. Учет вышеперечисленных факторов является возможным только на основе перехода от «жестких» алгоритмов параметрической и структурной адаптации к антропоморфному принципу формирования управления.
При использовании известных подходов к проектированию системы автоматического управления (САУ) динамическими объектами, к их основным обобщенным характеристикам обычно относят:
− цели управления; качество достижения этих целей;
− вычислительные ресурсы, требуемые для достижения поставленных целей с заданным качеством, или сложность САУ;
− объем трудозатрат (сроки), необходимые для разработки САУ, или сложность процесса проектирования САУ.
Поскольку требования к характеристикам САУ перспективных динамических объектов (ДО) постоянно растут, то показатели сложности системы и сложности процесса ее проектирования становятся ключевыми характеристиками, определяющими в конечном итоге качество проектных решений и эффективность функционирования САУ ДО.
Для анализа особенностей каждого из иерархических уровней интеллектуальных систем управления (ИСУ) ДО как информационных каналов передачи, хранения и обработки информации предлагается обобщенная информационная модель ИСУ в виде виртуальной вычислительной машины, включающей в себя память, вычислитель и каналы обмена информацией.
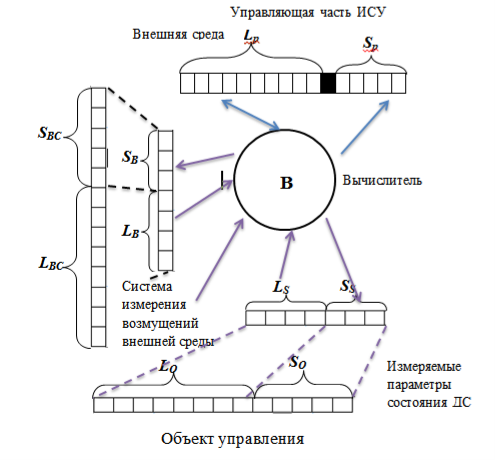
Рис. 2. Информационная модель ИСУ ДО
На рис.2 представлены основные компоненты обобщенной информационной модели ИСУ, где LBC — длина виртуальной программы, c помощью которой генерируются состояния окружающей среды (делается допущение, что она конечна); SBC — код состояния внешней среды; LB — длина программы, осуществляющей сбор информации об окружающей среде, т. е. измерение внешних возмущений (LBC<l<sub>BC</l<sub>); SB-код состояния внешней среды, доступной для распознавания; Lp-длина программы, генерирующей множество состояний ИСУ (алгоритм управления); Sp- код состояния ИСУ; LO — длина программы, генерирующей состояния ДО как объекта управления; SO — код состояния САУ ДС; Ls — длина программы, осуществляющей сбор (измерение) информации о состоянии объекта; Ss — код наблюдаемого состояния управления объекта; — виртуальный вычислитель, выполняющий коды программ LB, Lp, LS.
Предложенная информационная модель ИСУ ДС позволяет рассматривать решение задач управления с точки зрения их информационного содержания, а также оценить комбинаторную сложность состояния внешней среды, алгоритмическую сложность ИСУ и объекта управления и сформулировать, в конечном итоге, требования к обобщенным информационным характеристикам проектируемой ИСУ ДС [10].
Таким образом, разрабатывается теоретико-информационный подход к оптимизации проектных решений, осуществляемых на уровнях планирования, координации и исполнительном уровне ИСУ ДО, основанный на энтропийной оценке сложности алгоритмов управления, позволяющие формализовать процедуру структурной оптимизации ИСУ ДО.
Литература:
- Захаров В. Н. Нечеткие модели интеллектуальных промышленных регуляторов и систем управления. / В. Н. Захаров, С. В. Ульянов // Эволюция и принципы построения. Известия РАН. Техническая кибернетика. — 1993.–№ 4. — С. 189–206.
- Гаврилова Т. А. Базы знаний интеллектуальных систем / Т. А. Гаврилова, В. Ф. Хорошевский. — СПб.: Питер, 2001. — 384 с.
- Zadeh L. A. Fuzzy sets / L. A. Zadeh // Inf. Contr. — 1965. — № 8. — Р. 338–353.
- Негойце К. Применение теории систем к проблемам управления / Негойце К. — М.: Мир, 1981. –180 с.
- Алиев Р. А. Нечеткие регуляторы и интеллектуальные промышленные системы управления / Р. А. Алиев, Э. Г. Захарова, С. В. Ульянов // Итоги науки и техники. Сер. Техн. кибернетика. — 1991.– Т. 32. — М.: ВИНИТИ АН СССР.
- Нечаев Ю. И. Математическое моделирование в бортовых интеллектуальных системах реального времени/Нечаев Ю. И.// тр.5-й Всероссийской конференции «Нейроинформатика-2003».–М.: МИФИ, 2003. — Ч. 2: Лекции о нейроинформатике. — С. 119–179.
- Берштейн Л. С. Параллельный процессор нечеткого вывода для ситуационных экспертных систем/
- Л. С. Берштейн, В. М. Казупеев, С. Я. Коровин, А. Н. Мелихов // Известия АН CCCР. Техническая кибернетика.–1990.–№ 5.–С.181–191.
- Yamakawa T. High speed fuzzy controller hardware system / Yamakawa T. //Proc. 2nd Fuzzy System Symposium. — Tjkyo, Japan. — 1986. — № 6. — P. 122–130.
- В. И. Васильев, С. С. Валеев. Проектирование интеллектуальных систем управления ГТД на основе принципа минимальной сложности.// Вестник УГАТУ. Уфа: УГАТУ, 2007. T. 9, № 2 (20). C. 32–41.

