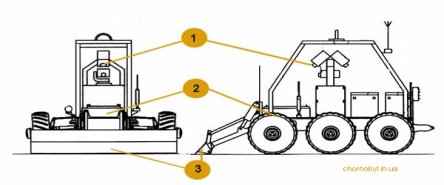
Мы хотели бы привлечь внимание читателя к имеющейся, и остающейся по нынешний день актуальной проблеме — применению, распространению и модернизации моделей промышленной робототехники. В данной работе будет представлен перспективный проект усовершенствования, методом замены самоходного шасси на гусеницы, уже существующего промышленного робота СТР-1, разработанного СТР-1 разрабатывался коллективом инженеров под руководством Кемурджиана Александра Леоновича. На сегодняшний день перед нами стоит задача эффективной защиты человека от радиации.
Ключевые слова: промышленная робототехника, СТР-1, самоходное шасси, конструкция гусеницы, робот.
We would like to draw the reader's attention to the existing and still relevant problem — the application, dissemination and modernization of industrial robotics models. In this paper, a promising improvement project will be presented, by replacing the self-propelled chassis with caterpillars, the already existing industrial robot STR-1, developed by STR-1 was developed by a team of engineers under the leadership of Kemurdjian Alexander Leonovich. Today we are faced with the task of effective human protection from radiation.
Keywords: industrial robotics, STR-1, self-propelled chassis, caterpillar construction, robot.
На сегодняшний день отечественному рынку роботизированных технологий есть к чему стремиться, вызвано это тем, что спрос на промышленных роботов будет всецело зависеть от заинтересованности руководства предприятий, для которых выход на новый уровень производственного оснащения зачастую является трудновыполнимой задачей. Преимущества от перехода на роботизированные технологии уже оценили во множестве зарубежных государств, где активно ведутся разработки и усовершенствование новейших образцов промышленной робототехники, которые в значительной мере увеличивают качество выпускаемой предприятием продукции, производительность и гибкость производственных процессов.
На сегодняшний день перед нами стоит задача эффективной защиты человека от радиации, возникшая одновременно с началом применения радиоактивных веществ, стала мощным стимулом роботостроения. Ведь кроме как удаление за пределы зоны радиации, нет в настоящее время других способов предохранить человека от лучевой болезни: от нее нет прививок, нет методов какого-то закаливания организма, предупреждающего заболевание в случае интенсивного облучения. Учитывая особенность робототехники как средства защиты человека от вредных воздействий, нужно признать, что робототехнические комплексы, предназначенные для работы в агрессивных средах, не менее важны, чем промышленные.
В комплект специализированного транспортного робота поставленного на ЧАЭС в 1986 году входило непосредственно два робота СТР-1, специальная люлька для доставки робота на место проведения работ, зарядно-разрядное устройство, пульт управления. Готовя робота к работе на ЧАЭС, конструкторы разработали специальное технологическое оборудования для дезактивации колес, которое также было поставлено в составе робототехнического комплекса.

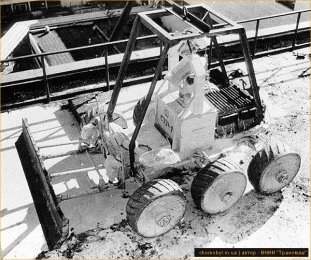
По опубликованным данным производительность СТР-1 была невысокой. Робот проработал в общей сложности не более 10 часов и очистил около 20 квадратных метров крыши.
Колёса сами по себе не предназначены для передвижения по бездорожью, их основная цель — перевозка грузов и максимальное повышение скорости транспортного средства.
Гусеницы, помогающие колёсам лучше сцепляться с поверхностью, возникли ещё во второй половине 19 века в 1879 году. Разработано это приспособление было Фёдором Абрамовичем Блиновым, а к началу 20 века гусеницы стали использовать всё чаще.

Так, например, уже в 1912 году компанией из США Holt было налажено производство гусеничных тракторов. Гусеницы разрабатывались и создавались для передвижения транспорта по бездорожью.
Плюсы гусениц:
‒ Отличное сцепление с дорогой, что улучшает езду на гололеде и рыхлом снегу.
‒ Разворот «на месте».
‒ Большая проходимость на грунтовых дорогах.


Стоит ли говорить, какая огромная польза для развития отечественной промышленности была бы получена при массовом вводе в эксплуатацию модернизированных роботов разных конструкций и с применением инновационных технических решений? Но, к сожалению, этого пока не произошло. Остается лишь надеяться на то, что в ближайшем будущем этот парадокс исчезнет, однако одна из главных задач роботов, работающих в зоне радиации — сохранить жизнь человеку. Ведь только тесным взаимодействием человека и техники решатся все основные проблемы современности, ведь человеческая жизнь самое ценное в этом мире.
Литература:
- Робот СТР-1. — URL: https://вшоке.рус/eto-interesno/robot-str-1/ (25.11.2018)
- Специализированный транспортный робот СТР-1. — URL: http://pripyat-city.ru/video/7-specializirovannyj-transportnyj-robot-str-1.html (25.11.2018)
- “Теория механизмов и механика машин” Поезжаева Е. В. (25.11.2018)

