В статье описывается действующая авторская модель гусеничного робота, управляемого двумя согласованно работающими микроконтроллерами с ультразвуковым локатором-дальномером, лазерными целеуказателями подсветки препятствий, датчиком ионизирующих излучений и передающей видеокамерой. Таким образом, созданная автором действующая модель входит в обойму роботов-исследователей, позволяющих получать информацию из недоступных мест как, например, роботы-исследователина шасси фирмы ActiveMedia Robotics типа Amigobot с 8 ультразвуковыми локаторами.
Ключевые слова: робот-исследователь, локатор-дальномер, лазерный указатель, датчик ионизирующих излучений, беспилотник, микроконтроллер.
За основу гусеничной платформы взят радиоуправляемый игрушечный танк. Начальные теоретические принципы изучались по различным источникам [1–3]. От танка оставлены гусеничная платформа с моторами и редукторами, а также аккумуляторная батарея (АКБ). Всё остальное демонтировано. Сверху гусеничную платформу закрывает прозрачная крышка. На ней установлен вращающийся локатор, детали корпуса, которого изготовлены из прозрачного пластика. Под крышкой находится микроконтроллерный блок управления. Все основные части платформы и локатора можно рассматривать детально, ввиду использования прозрачного пластика. Данное решение, продиктовано требованиями современного дизайна и желанием в учебных целях предоставить возможность ознакомления с внутренним устройством робота без демонтажа корпуса (Рис.1).

Рис. 1. Робот с локатором без камеры
Микроконтроллер (рис.2) локатора по командам: «запуск измерения» и «выбор ультразвукового датчика» (рис.3а,б) микроконтроллера платформы производит единичный цикл измерения расстояния.

Рис. 2 Микроконтроллер


аб
Рис. 3. Дальномер: а) — общий вид; б) — в разборе
Данные о результатах посылаются в процессор платформы (3 битный формат) для принятия решения о дальнейшей траектории движения. (Перед началом установки УЗ- датчика расстояний с ним были проведены предварительные испытания, результаты которых представлены в таблицах 1 и 2.).
Таблица 1
Проверка точности измерений (разные поверхности, расстояние s =200 мм)
|
Материал |
Стекло |
Клеёнка |
Ворс |
Стена |
Полировка |
Поролон |
Обои |
|
Расстояние по прибору, мм |
203 |
202 |
235 |
199 |
202 |
225 |
204 |
|
Абсолютная погрешность │s -s д │, мм |
3 |
2 |
35 |
1 |
2 |
25 |
4 |
Таблица 2
Рабочие параметры дальномера
|
Дальность действия с допустимой точностью |
Допустимый угол падения |
Больше точность измерений |
Рабочая температура |
Время обновления показаний |
|
2,9 м |
300 |
1 -2,5 м |
0–400С |
Не более 0,5 с |
Поворот вращающегося диска локатора с установленными на нем ультразвуковыми датчиками расстояния осуществляется сервоприводом по командам процессора платформы [4,5]. Вращающийся локатор-дальномер имеет угол поворота до 180 0 (рис.4). Благодаря установленным двум ультразвуковым фронтальным и кормовым сенсорам, он имеет возможность полного кругового сканирования местности. На верхней крышке локатора установлен двухстрочный жидкокристаллический индикатор (ЖКИ). На нем демонстрируется анимация зондирующего импульса и путем заполнения строк белыми прямоугольниками наглядно представляется условная дистанция до препятствия в случае его обнаружения (рис.5).
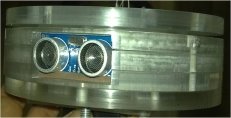
Рис. 4. Локатор в сборе

Рис. 5. Двухстрочный ЖК- индикатор
Особое внутреннее устройство механической части локатора позволяет верхней крышке с дисплеем ЖКИ оставаться неподвижной во время поворота вращающегося диска с датчиками. Такое инженерное решение облегчает восприятие информации с ЖК индикатора. Это оригинальное дизайнерское решение . Красные светодиоды показывают команды управления локатором, а синие — выходные данные о расстоянии [6]. Питание всего устройства осуществляется от двух Li-ion АКБ с зарядом 2 А•ч. Контроль напряжения АКБ осуществляется процессором платформы. Это видно через прозрачную крышку на светодиодном индикаторе, символизирующем батарейку. При разряде до 7 В работа блокируется и с частотой 1 Гц мигает нижний светодиод индикатора напряжения батарейки. Два независимых интегральных стабилизатора дают + 5 В на локатор и электронику платформы. Два Н-моста (на полевых транзисторах) в режиме широтно-импульсной (ШИМ) модуляции управляют электродвигателями гусениц правого и левого борта. Напряжение для Н-мостов напрямую подают от источника питания.
В программе управления предусмотрено два режима работы , которые выбираются посредством переключателя.
Первый режим предназначен для демонстрации на стенде. Платформа стоит неподвижно, ступенчато поворачивая локатор на различные углы. При этом каждому углу поворота соответствует последовательное включение фронтального и кормового ультразвуковых датчиков. В случае обнаружения препятствия ближе 20 см, платформа предпринимает короткий манёвр уклонения от препятствия.
Второй режим является основным. При его выборе платформа начинает движение с одновременным сканированием пространства впереди по ходу движения. Движение осуществляется в режиме: движение — остановка для сканирования — принятие решения о последующей траектории движения. Далее идёт повторение цикла. Для ускорения работы сканирование осуществляется вначале спереди в узком секторе. При обнаружении препятствия производится дополнительное сканирование в более широком секторе. Способы объезда: небольшое изменение разности скорости вращения гусениц в одну сторону, значительное (до 2 крат); вращение гусениц в разные стороны, отъезд назад с разворотом на месте в ту или иную сторону в зависимости от обстоятельств. Дистанция обнаружения препятствий: 10–70 см. Дискретность — 10 см. Использование двух процессоров, ускоряет работу всей электроники, упрощает отладку программ и позволяет модернизировать каждую в отдельности. Управление работой комплекса осуществляет главный процессор.
Гусеничное шасси функционально объединяет в себе все основные части, такие как: аккумуляторная батарея (АКБ), гусеничный движитель с моторами и редукторами, плата главного процессора, поворотный локатор-дальномер. На плате электроники размещаются стабилизаторы напряжения, два Н-моста управления двигателями гусениц и светодиодный индикатор уровня заряда АКБ. Управляющий контроллер смонтирован на отдельной квадратной плате и установлен на основной плате сверху.
В микроконтроллер была загружена тестовая программа для проверки работоспособности всех узлов. После чего плата закреплена на место. Затем устанавливают локатор-дальномер с другим микроконтроллером.
Также к микропроцессорной плате локатора и плате управления были временно припаяны шлейфы для подключения программатора при написании и отладке программ.
Локатор сделан из 5 слоев прозрачного поликарбоната. Верхний и нижний слои неподвижные. Нижний — опора для сервопривода поворота диска с датчиками. Сервопривод Futaba 4004 поворачивает до 180 0 . Два датчика дают круговой обзор. Электронная часть локатора состоит из: сервопривода поворота вращающегося диска Futaba 4004, управляемого основным процессором ATMega328P, 2 ультразвуковых локатора HC-SR04, ЖКИ экрана и процессорной платы на микроконтроллере ATtiny2313.
Также на локаторе были установлены красные лазерные диоды от указки в качестве лазерных целеуказателей подсветки препятствий.
Цифровая цветная автономная видеокамера с высокой светочувствительностью и видеопередатчиком с несущей частотой 1,2 ГГц. Используя текстильную застёжку Velcro, автором предусмотрена возможность быстрой установки камеры на платформу (рис.6)

Рис. 6. Видеокамера и текстильная застёжка Velcro для установки камеры
Блок-схема передающего узла: низкочастотный видеосигнал с камеры подается на вход видеопередатчика с несущей частотой 1,2 ГГц. Камера и передатчик получают питание от встроенной батареи (8,4 В; 2000 мА · ч).
Радиус действия передатчика на открытой местности до нескольких десятков метров. Время работы от полностью заряженного аккумулятора не менее четырёх часов.
В работе использована цифровая камеры с инфракрасной подсветкой.
Конструкция цифровой камеры во многом похожа на конструкцию аналоговой. Условно фотокамеру можно разделить на две части — объектив и корпус. Корпус включает в себя механизм фотокамеры: затвор, процессор, матрицу, управляющие органы. Объектив может быть съемным и встроенным, он представляет собой группу линз, заключенных в корпус из металла или пластика. Единственное принципиальное различие цифровой и аналоговой камеры — светочувствительный элемент, отвечающий за формирование изображения. У аналоговых фотокамер светочувствительным элементом служит фотопленка, у цифровых эту роль играет матрица. При прохождении луча света через объектив камеры светочувствительный элемент фиксирует изображение.
Для того чтобы привести пример практического использования данного робота, авторами было принято решение об использовании датчика ионизирующих излучений (KDS -1030). Газоразрядный счётчик Гейгера автоматически подсчитывает частицы. Он состоит из стеклянной трубки, покрытой изнутри металлом (катод) и заполненной аргоном. Вдоль трубки проходит металлическая нить — анод. Принцип действия: ударная ионизация. Быстродвижущийся электрон при соударении выбивает у нейтрального атома электрон и тот становится положительным ионом. А эти электроны продолжат процесс ионизации электронным ударом. Образуется лавина заряженных частиц. Следовательно, электрический ток через счётчик резко увеличивается. Тогда на нагрузочном резисторе R появляется напряжение, которое подаётся на регистрирующее устройство. Гашение лавинного разряда происходит автоматически: падение напряжения на R так велико, что напряжение между анодом и катодом настолько уменьшается, что ток в трубке с газом больше невозможен. Прибор снова готов к приёму новой частицы [1]. На Рис.7 представлена принципиальная схема детектора ионизирующего излучения, светодиод которого расположен перед видеокамерой. Кроме того, в авторской модификации добавлен и звуковой сигнал.
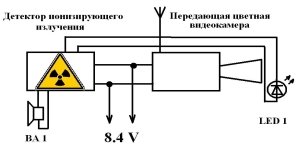
Рис. 7. Принципиальная схема детектора ионизирующего излучения
Пульт смонтирован в небольшом кейсе с прозрачной крышкой (рис.8)

Рис. 8. Пульт контроля
Внутри находятся следующие узлы: Li-ion аккумуляторная батарея напряжением 12,6 В, зарядом 2400 мА·ч, приемник видеосигнала частотой 1,2 ГГц от автономной цифровой цветной видеокамеры и монитор. Корпус пульта предохраняет электронику от повреждений при эксплуатации и транспортировке, а также делает процесс эксплуатации более простым и легким. Время работы пульта от полностью заряженной батареи не менее двух часов. Общий вид комплекса представлен на рис. 9.

Рис. 9. Общий вид комплекса
Программа осуществляет при приеме внешнего управляющего сигнала низкого логического уровня (команда запуска измерения) однократное зондирование расстояния до возможного препятствия ультразвуковым дальномером фронтальным (высокий логический уровень на входе выбора датчика) или кормовым ультразвуковым дальномером (низкий логический уровень на входе выбора датчика). После инвертирования логического уровня на выводе запуска измерения, программа формирует на трех выводах микроконтроллера в двоичном коде комбинацию сигналов, соответствующих расстоянию до препятствия [7]. Комбинация остается на выводах вплоть до запуска следующего цикла измерения расстояния [8,9]. Также программа формирует на ЖК индикаторе условную анимацию, визуализирующую расстояние до препятствия (заполнение верхней строки белыми прямоугольниками справа налево; один прямоугольник соответствует расстоянию в 5 см) в верхней строке экрана. В нижней строке экрана аналогично происходит заполнение прямоугольниками, но слева направо. Также программа обеспечивает анимацию прохождения зондирующего импульса. Символ «>» в верхней строке для фронтального зондирующего импульса (движение слева направо) и «<» в нижней строке (движение справа налево). Если препятствия дальше 40 см, то анимация зондирующего импульса проходит всю строку экрана. Если препятствие ближе 35 см, то анимация останавливается, упираясь в крайний белый прямоугольник, символизирующий препятствие.
В первых строчках программы описывается тип используемого микроконтроллера и его тактовая частота. Это необходимо для правильной работы программы. Тип микропроцессора ATTiny 2313, тактовая частота 8 МГц.
Далее описывается конфигурация соединения выводов ЖК индикатора и микроконтроллера. Используется ЖК индикатор: 2 строки по 8 знакомест. Но BASCOM AVR такой тип индикатора не понимает, поэтому в программе описано, что подключен индикатор 2 строки по 16 знакомест. При написании программы это обстоятельство учитывалось. Используется только первые 8 знакомест. И т. д.
В начале программы следует описание типа микроконтроллера и его тактовой частоты. Затем следует описание конфигурации выводов микроконтроллера. Описывается, которые из них работают как входы, а какие — как выходы. Далее объявляются переменные и их тип. Тип переменной указывает микроконтроллеру, какой необходимый объем памяти необходимо зарезервировать для ее хранения. После чего следует тестирование поворота локатора путем последовательного поворота его в крайние положения. Пауза в работе 3 с.
Программа может работать в двух режимах в зависимости от положения переключателя режима, расположенного спереди платформы. И далее.
Заключение.
В результате работы над проектом была разработана и изготовлена действующая модель программируемого гусеничного робота (на двух микроконтроллерах) с вращающимся ультразвуковым локатором-дальномером кругового обзора, лазерными целеуказателями, датчиком ионизирующих излучений и передающей видеокамерой с инфракрасной подсветкой.
Для микроконтроллеров (однокристальных компьютеров) были написаны программы. Одна для дальномера, другая — для работы ходовой части с учётом данных, получаемых от самого дальномера.
Особенность инженерного решения, использованного при разработке конструкции локатора, — это то, что датчики вращаются, а верхняя крышка с видеокамерой и нижняя часть корпуса локатора неподвижны.
Область применения подобных разработок: обследование помещений и территорий, используя алгоритмы объезда препятствий, в умном доме, в качестве курьера, в медучреждениях. Кроме того, данную модель можно использовать в системе дополнительного образования или в учебном процессе средних специальных учебных заведений технической направленности. С этой целью при изготовлении модели были использованы прозрачные материалы, позволяющие увеличить степень наглядности конструкции изделия.
Литература:
- Мякишев Г. Я., Буховцев Б. Б., Чаругин В. М. Физика. 11 класс. / Мякишев Г. Я.: учебник. — М.: Просвещение, 2020. — 432 с.
- Яворский Б. М., Детлаф А. А. Справочник по физике для инженеров. − М.: Наука, 1979. — 944 с.
- Резников З. М. Прикладная физика. −М.: Просвещение, 1989. — 239 с.
- Советов Б. Я., Яковлев С. А. Робототехника. − М.: Высшая школа, 2005. — 271 с.
- Афонин В. Л. Интеллектуальные робототехнические системы: курс лекций / В. Л. Афонин, В. А. Макушкин. − М.: Интернет-Университет Информационных Технологий, 2009. − 199 c.
- Лазерный диод — URL: http://www ru.wikipedia.org FSO (технология) (дата обращения: 1.09.2020).
- Интеллектуальные роботы: учеб. пособие по направлению «Мехатроника и робототехника» / под общ. ред.Е. И. Юревича. М.: Машиностроение, 2007. –360 с.
- Воротников С. А. Информационные устройства робототехнических систем. — М.: Изд. МГТУ им. Н. Э.Баумана, 2005.
- Шпак Ю. А. Справочник по программированию Bascom-AVR.– М.: Пресс, 2000.–340 с.
- Хамикоев, А. Я. Гусеничный робот с ультразвуковым локатором кругового обзора и передающей видеокамерой / А. Я. Хамикоев. — Текст: электронный // Старт в науке: [сайт]. — URL: https://school-science.ru/12/22/48678 (дата обращения: 05.10.2024).

