Статья посвящена модернизации робота радиационной и химической разведки, который ставит перед собой следующие задачи: визуальной разведки местности, промышленных и жилых помещений, объектов транспорта при любой освещенности; дистанционного исследования радиологической обстановки; поиска источников ионизирующего излучения; перемещения и укладки в контейнер опасных предметов. Чтобы увеличить проходимость робота по бездорожью и улучшить сцепление с дорогой мы поменяли колесное оборудование на гусеничное.
Ключевые слова: гусеничное оборудование.
The article is devoted to modernization of the robot radiation and chemical reconnaissance, which puts before itself the following tasks: visual reconnaissance, industrial and residential buildings, transportation facilities in any light; remote monitoring of the radiological situation; the search of sources of ionizing radiation; moving and stacking in the container. To increase the maneuverability of the robot on the road and improve grip we changed the wheel equipment on the track.
Keywords: caterpillar equipment.
Робототехническое средство радиационной разведки (РТС-РР) в составе комплекса МЧС. Назначение Мобильный робот РТС-РР оснащён манипулятором и приборами радиационной разведки и предназначен для замены людей при работе в зонах повышенной опасности и выполнения следующих задач: визуальной разведки местности, промышленных и жилых помещений, объектов транспорта при любой освещенности; дистанционного исследования радиологической обстановки; поиска источников ионизирующего излучения; перемещения и укладки в контейнер опасных предметов.

Рис. 1. Робот радиационной разведки РТС-РР
Технические характеристики:
Габаритные размеры, мм 1410х650х1200 Масса, кг 270 Максимальная скорость движения, м/с 0,5 Грузоподъемность манипулятора 10кг. Дальность управления: по радиоканалу 500м, по кабельной линии 100м. Время автономной работы 2ч. Энергетический диапазон гамма-излучения 0,6 МэВ. Рабочий диапазон по мощности дозы гамма-излучения: при поиске источника 3 Р/ч, при наведении захватного устройства на источник, 2Р/ч. Основная погрешность измерения мощности дозы ±30 %. Угол зрения системы гамма-поиска, град.
Для достижения цели, мы решили заменить колесную платформу, которая используется на «РТС-РР». на гусеничную.

Рис. 2. Гусеничная платформа
Колёса сами по себе не предназначены для передвижения по бездорожью, их основная цель — перевозка грузов и максимальное повышение скорости транспортного средства.
Роботы и робототехнические системы часто предназначены для использования в экстремальных условиях, там, где необходимо облегчить или обезопасить труд человека. Очень часто мобильные роботы применяются в экстремальных ситуациях, например при тушении пожаров, локализации радиоактивных отходов и т. п., и, как правило, работают в труднопроходимой местности.
Решение подобных задач возлагается на мобильных гусеничных роботов, которые обладают высокой проходимостью и грузоподъемностью. Важное отличительное качество гусеничных мобильных роботов заключается в их маневренности. Обладая независимым приводом для каждой из гусениц в отдельности, мобильный робот может легко менять направление собственного движения.
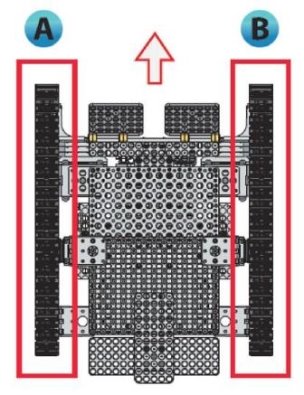
Рис. 3. Вид сверху гусеничной платформы
Благодаря тому, что скорость каждой из гусениц регулируется в отдельности, достаточно легко управлять движением мобильного робота. Для задания какого-либо направления движения необходимо изменить относительную скорость приводов.
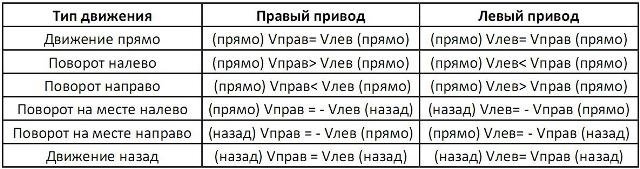 Рис. 4.. Работа гусеничной платформы
Рис. 4.. Работа гусеничной платформы
Вышеуказанная таблица демонстрирует соотношение скоростей и направлений вращения приводов гусеничного шасси. Важно обращать внимание на положение привода, ведь в зависимости от ориентации в пространстве привода зависит направление вращения его выходного вала, а соответственно и направление движения гусеничных траков. Например, для того чтобы робот двигался вперед, необходимо, чтобы его левый привод вращался «против часовой стрелки», а правый — «по часовой стрелке»
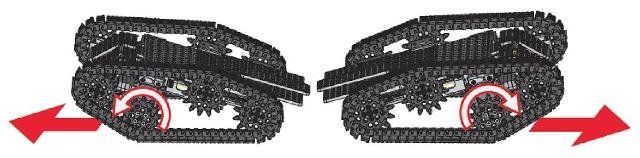 Рис. 5. Принцип работы
Рис. 5. Принцип работы
Для того чтобы двигаться прямо, необходимо, чтобы правый и левый приводы вращались с одинаковой скоростью в направлении «прямо».
Для того чтобы повернуть налево, необходимо, чтобы скорость правого привода была больше, чем скорость левого. Чем больше будет разница скоростей, тем меньше будет радиус разворота при движении.
Для того чтобы повернуть направо, необходимо, чтобы скорость правого привода была меньше, чем скорость левого. Чем больше будет разница скоростей, тем меньше будет радиус разворота при движении.
Для того чтобы повернуть налево на месте, необходимо, чтобы правый привод вращался «прямо», а левый — «назад» с такой же скоростью.
Для того чтобы повернуть направо на месте, необходимо чтобы левый привод вращался «прямо», а правый «назад» с такой же скоростью.
Для того чтобы двигаться назад, необходимо, чтобы правый и левый приводы вращались с одинаковой скоростью в направлении «назад».
Помимо высокой маневренности гусеничные шасси обладают повышенной проходимостью. Благодаря хорошему сцеплению гусеничных траков с поверхностью, по которой осуществляется движение, гусеничные роботы могут преодолевать различные неровности поверхности и преграды.
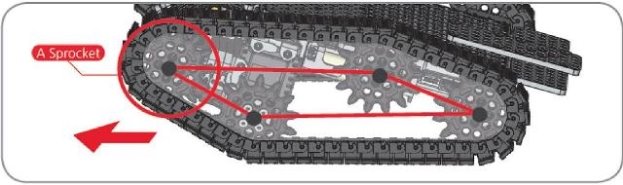
Рис. 6. Принцип движения
Традиционно гусеничные транспортные средства имеют специальный угол наклона спереди, чтобы въезжать на препятствия по ходу движения. Чем выше проходимость гусеничного робота или транспортного средства, тем, как правило, больше данный уклон.
Плюсы гусениц:
‒ Отличное сцепление с дорогой, что улучшает езду на гололеде и рыхлом снегу.
‒ Разворот «на месте».
‒ Большая проходимость на грунтовых дорогах.
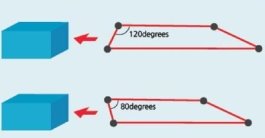
Рис. 7. Угол наклона
Литература:
- Концепции развития робототехники / Е. В. Поезжаева // Концепции развития робототехники: учебное пособие / М-во образования и науки Рос. Федерации, Перм. нац. исслед. политехн. ун-т. — Пермь: Изд — во ПНИПУ, 2017. — 437 с. Допущено УМО вузов по образованию в обл. автоматизированного машиностроения (УМО АМ) в качестве учеб. пособия.

