В технических процессах зачастую присутствует так называемое транспортное запаздывание. Этот вид запаздывания появляется, к примеру, при перемещении вещества или энергии с конечной скоростью в системе, без изменения их структуры и свойств.
Примером объекта с запаздыванием данного типа может служить стан холодного проката металла, где датчик замера толщины проката по своей конструкции не может быть расположен точно под валками, а только на каком-то расстоянии от них. В результате чего, измеряема величина, в конкретном случае — толщина проката, имеет задержку, так называемое транспортное, или «чистое», по отношению к регулирующему воздействию — степени обжима проката валками.
Еще одним примером объектов с транспортным видом запаздывания может служить производство бумаги или стекла. На многих стадиях этих производственных процессов имеют место задержки, причем их значения во много превышают постоянные времени объекта, тем самым создавая определенные проблемы при оптимальном управлении в данных технологических процессах.
Так же, значительные транспортные запаздывания присутствуют в регулировании процесса горения, где значение выходной величины характеризующая технологический процесс, уровень содержания кислорода в продуктах горения — непосредственно в дымовых газах имеет задержку примерно одна минута. Основная часть запаздывания в этом случае приходится на датчик и обусловлена временем прохождения газов через газоанализатор.
Транспортное запаздывание, которым нельзя пренебрегать, присутствует в регулировании уровня жидкости, шаровыми мельницами, а так же объектами, в которых присутствует запаздывание в емкостях и трубопроводах.
Результатом присутствия транспортного запаздывания, или по-другому называемое «чистого», в технологическом процессе, является неизменность сигнала в течение определенного отрезка времени на выходе объекта, после изменения входного сигнала.
Тем не менее, кроме вышеуказанного типа запаздывания, в реальных технологических объектах может присутствовать и другой вид задержки. Например, если объект охарактеризован несколькими схожими источниками времени, или же является объектом с распределенными параметрами, математическое представление является уравнением в частных производных, то после подачи управляющего сигнала, выходной сигнал остается неизменным в течение некоторого времени. В этом случае считается, что в объекте присутствует емкостной или эффективный тип запаздывания.
Явление запаздывания присутствует в процессах и объектах разной природы. Они могут наблюдаться как в технике, так и в биологии, экономике, и оказывают достаточно большое влияние на качество процесса регулирования, а также устойчивость системы.
Достаточно ярко выраженный эффект запаздывания оказывает влияние на динамику оптимальных релейных систем, это, к примеру, оптимальные по быстродействию системы управления.
Наряду с вышесказанным, особенностью большого числа технологических объектов является многоёмкостность (наличие каскадов или цепочек). Она приводит к повышению порядка дифференциального уравнения этого объекта, то есть появляется множество малых постоянных времени объекта. В таком случае, чтобы упростить динамическую модель этого объекта, нужно ввести дополнительное звено задержки, значение которого примерно должна быть равна сумме постоянных времени технологического объекта. Такой вид запаздывания называют динамическим.
Помимо этого, в определенных объектах, которые охвачены контуром обратной связи, появляется дополнительная задержка в этом контуре.
Присутствие запаздывания в системе серьезно ухудшает динамику замкнутой системы. Как правило, при отношении ![]() /Т>0,5 типовые законы управления не позволяют добиться высокой точности и быстродействия в процессе регулирования. Основной причинной этому является резкое снижение критического коэффициента усиления, при увеличении величины задержки в объекте управления.
/Т>0,5 типовые законы управления не позволяют добиться высокой точности и быстродействия в процессе регулирования. Основной причинной этому является резкое снижение критического коэффициента усиления, при увеличении величины задержки в объекте управления.
В результате, присутствие в технологическом объекте запаздывания сильно изменяет характер переходных процессов, протекающих в оптимальных по быстродействию системах управления, и поэтому довольно часто такие системы являются неприменимыми на практике. Таким образом, появляется необходимость компенсировать задержку, выбрав соответствующий алгоритм управления.
Таким образом, наличие в объекте запаздывания существенным образом искажает характер протекания переходных процессов в оптимальных по быстродействию системах управления, поэтому во многих случаях данные системы оказываются непригодными для практического применения. Отсюда возникает задача компенсации запаздывания путем соответствующего выбора алгоритма управления.
Можно сделать вывод, что синтез строго оптимальных по быстродействию законов управления для линейных объектов с запаздыванием приводит в большинстве случаев к схемам оптимальных регуляторов, реализация которых в реальных условиях или невозможна, или совершенно нецелесообразна ввиду значительных затрат и сложности аппаратурного оформления.
В книге [3] авторы предложили методы синтеза квазиоптимальных по быстродействию алгоритмов, позволяющие построить регуляторов для промышленных объектов с запаздыванием. Был предложен метод, основан на аппроксимации функциональных составляющих оптимального закона произвольным числом отрезков. Линейная аппроксимация позволяет получить квазиоптимальный алгоритм управления в явном виде и довольно просто разработать схему квазиоптимальной по быстродействию системы. В книге описаны процедуры получения квазиоптимальных по быстродействию законов управления для объектов с запаздыванием, как в управляющих, так и в промежуточных координатах.
Наиболее часто используются принципы построения и методики синтеза оптимальных регуляторов для объекта с запаздыванием, основанные на методе упреждения координат вектора состояния. Суть его заключается в том, что оптимальный закон управления в системе с запаздыванием формируется при тех же значениях коэффициентов регулятора, что и для системы без запаздывания, но с использованием упрежденного вектора состояния.
Главным недостатком структуры с упредителем является увеличение ошибки прогнозирования координат вектора состояния при малых периодах квантования в связи с неточностью модели и увеличением числа циклов решения системы уравнения.
Общая структурная схема управления объектом с запаздыванием
Одним из вариантов построения системы управления при неполной информации о состоянии объекта это введение в схему регулятора устройства для восстановления недостающих или всех координат вектора состояния объекта(наблюдатель пониженного и полного порядка соответственно). Мы будем использовать наблюдатель полного порядка (НПП). Для осуществления требуется в схеме с наблюдателем переместить суммарное запаздывание за динамическую часть модели объекта. Структурная схема такого решения представлена на рисунке 1. Данный метод имеет преимущества перед ранее применяемыми методами формирования упрежденных координат.
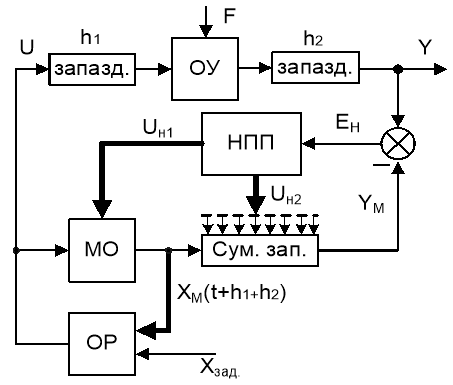
Рис. 1. Структурная схема системы управления объектом с задержкой
НПП — наблюдатель полного порядка, МО — модель объекта, ОР — оптимальный регулятор, ОУ — объект управления.
За счет использования наблюдающего устройства осуществляется соответствие движений в объекте управления и в его приближенной модели. Управляющий сигнал формируется по сигналам с модели объекта без запаздывания, в результате чего повышается быстродействие и точность регулирования в контуре «Модель — Объект», что приводит к улучшению качества управления всей системы. Так же стоит отметить, помимо получения упрежденного выхода мы получаем значения недоступных для измерения координат. В соответствии с этим появляется возможность применять более совершенные по структуре оптимальный по быстродействию или линейный регулятор.
Большим преимуществом данной схемы является возможность раздельного расчета контуров наблюдения и регулирования. Наблюдатель полного порядка по сути компенсирует как координатные, так и параметрические возмущения в системе.
При отсутствии или же незначительном уровне возмущающего воздействия F целесообразно применять статический наблюдатель полного порядка (СНПП), обеспечивающий более высокое быстродействие и запас устойчивости системы, а так же являющимся более простым для расчета. Примером такого объекта могут служить различные термостатические системы, для которых важно поддержание точного определенного уровня температуры в системе и работа по заданной программе нагрева и охлаждения.
При высоком уровне возмущений, действующих на объект, применяют астатический наблюдатель полного порядка (АНПП), который формирует оценку данного возмущения и компенсирует его.
Так же наблюдатель может выполнять функции фильтра, если в выходном сигнале присутствует высокий уровень шума, чем обеспечивает получение оценок сигналов ![]() и
и ![]() с малой шумовой составляющей.
с малой шумовой составляющей.
Разработку данного похода к управлению удобнее вести в цифровом виде, ориентируясь на реализацию в микропроцессорных контроллерах.
Литература:
- Мазуров, В. М. Модальные регуляторы для промышленных объектов с запаздыванием/ В. М. Мазуров, А. Е. Мерцалов // Автоматизация в промышленности/ Издательский дом "ИнфоАвтоматизация". — Москва, 2006. — № 9 — C. 41-46.
- Мазуров, В.М. Расчет модальных цифровых регуляторов для объектов с запаздыванием/ В. М. Мазуров, В. С. Карпов // Учебное пособие. — Тула: Тул. гос. техн. ун-т., 1995. — 65с.
- Клюев, А.С. Синтез быстродействующих регуляторов для объектов с запаздыванием/ А. С. Клюев, В. С. Карпов — М.: Энергоатомиздат, 1990, — 176 с.
- Бесекерский, В.А. Теория систем автоматического управления/ В.А. Бесекерский, Е.П. Папов — М.: Наука, 1997. — 768 с.

