В наших статьях, рассматривающих электромеханические переходные процессы в линейных асинхронных двигателях, математическое моделирование дано в системе абсолютных единиц. При рассмотрении системы автоматического регулирования скорости в асинхронных двигателях регуляторы тока и скорости определяются из параметров математической модели асинхронного двигателя. В зависимости от принятой системы единиц (абсолютных или относительных) параметры регуляторов будут различны.
Данная работа является развитием статьи [1], в которой переменные ![]() и
и ![]() определялись на выходе апериодических звеньев. В этой статье эти переменные получены с интегрирующих звеньев, что существенно изменяет возможности математической модели асинхронного двигателя.
определялись на выходе апериодических звеньев. В этой статье эти переменные получены с интегрирующих звеньев, что существенно изменяет возможности математической модели асинхронного двигателя.
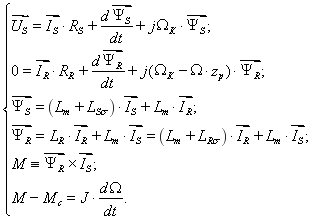
|
|
(1) |
|
(2) | |
|
(3) | |
|
(4) | |
|
(5) | |
|
(6) |
Так как электромагнитный момент определяется через переменные ![]() и
и ![]() , то из этих уравнений исключим переменные
, то из этих уравнений исключим переменные ![]() и
и ![]() .
.
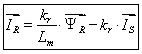
Из уравнения (4) выразим ![]() :
:
![]()
Обозначим 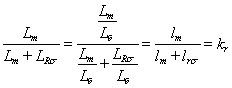 , где о. е.
, где о. е. ![]() и
и ![]() , тогда
, тогда
|
|
(7) |
Из уравнения (3) исключим ![]() :
:

Обозначим 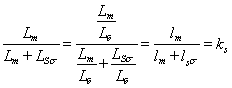 , тогда
, тогда

Преобразуем выражение в скобке:
![]() где
где![]()
Тогда

|
|
(8) |
В уравнение (2) подставим ![]() :
:

|
|
(9) |

где ![]()
![]()
Отсюда выразим:
|
|
(10) |
В уравнении (9) перейдем к оператору ![]() и разложим векторы
и разложим векторы ![]() и
и ![]() на проекции:
на проекции:
|
|
(11) |

Проекция уравнения (11) на ось +1:
|
|
(12) |


Обозначим 
![]()
где ![]()
![]()
В результате получим уравнение, которое было рассмотрено нами в работе [1] при получении переменной ![]() на выходе апериодического звена:
на выходе апериодического звена:



Для получения переменной ![]() на выходе интегрирующего звена раскроем скобки в левой части:
на выходе интегрирующего звена раскроем скобки в левой части:
![]()
Перенесем первое слагаемое в правую часть:
![]()
Наконец, переменная ![]() выразится через интегрирующее звено:
выразится через интегрирующее звено:
|
|
(13) |

Этому уравнению (13) соответствуют структурная схема и оболочка, представленные на рис. 1 и 2.
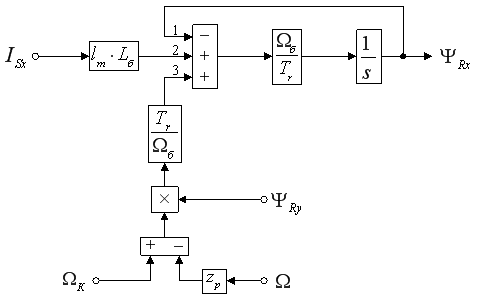
Рис. 1. Структурная схема для определения ![]()
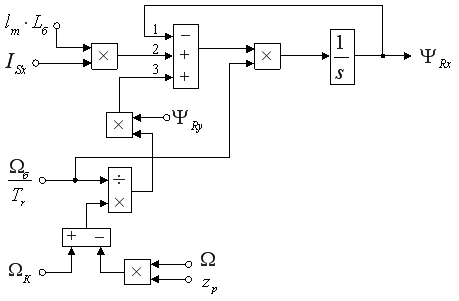
Рис. 2. Оболочка для определения ![]()
Проекция уравнения (11) на ось+j:
|
|
(14) |
![]()



Для получения переменной ![]() на выходе интегрирующего звена раскроем скобки в левой части перенесем первое слагаемое в правую часть:
на выходе интегрирующего звена раскроем скобки в левой части перенесем первое слагаемое в правую часть:
![]()
|
|
(15) |

Полученному уравнению (15) соответствуют структурная схема и оболочка, показанные на рис. 3 и 4.
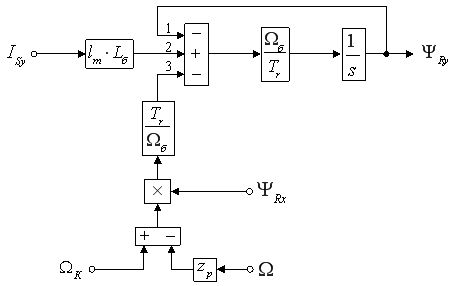
Рис. 3. Структурная схема для определения ![]()
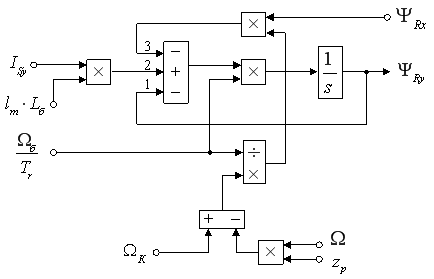
Рис. 4. Оболочка для определения ![]()
Из уравнения (1) исключим ![]() :
:
|
|
(*) |
![]()
Подставим ![]() в (*):
в (*):
![]()
Подставим в это уравнение ![]() из уравнения (10):
из уравнения (10):

Переведем уравнение ![]() в изображения, для этого выразим
в изображения, для этого выразим ![]() :
:

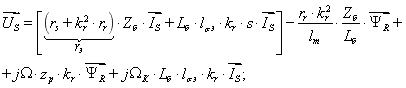

![]()
![]()
Выразим векторы ![]() ,
, ![]() и
и ![]() через проекции:
через проекции:
![]()
![]()
![]()
|
|
(16) |

Проекция уравнения (16) на действительную ось +1:
|
|
(17) |

Проекция уравнения (16) на мнимую ось +j:
|
|
(18) |

Из уравнения (17) выразим ![]() :
:


Структурная схема и оболочка для реализации тока ![]() в Matlab-Simulink даны на рис. 5 и 6.
в Matlab-Simulink даны на рис. 5 и 6.
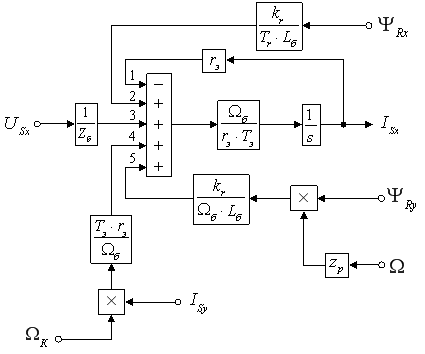
Рис. 5. Структурная схема проекции статорного тока ![]() на ось+1
на ось+1
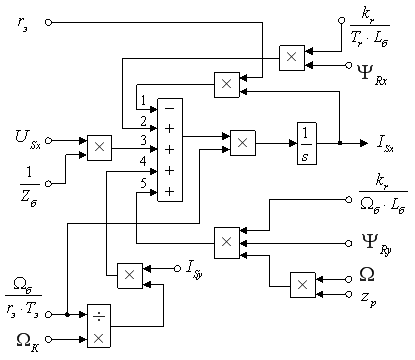
Рис. 6. Оболочка проекции статорного тока ![]() на ось+1
на ось+1
Аналогично из уравнения (18) выразим ![]() :
:

Структурная схема и оболочка, соответствующие этому уравнению, представлены на рис. 7 и 8.
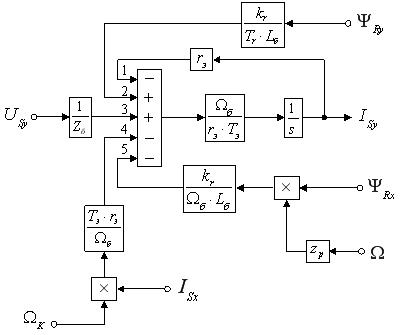
Рис. 7. Структурная схема проекции статорного тока ![]() на ось+j
на ось+j
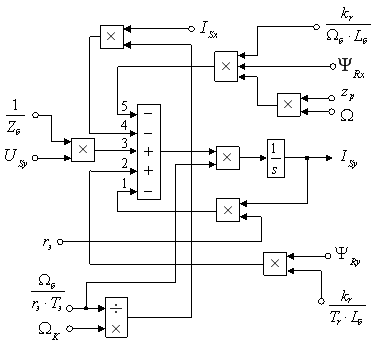
Рис. 8. Оболочка проекции статорного тока ![]() на ось+j
на ось+j
Структурная схема для реализации уравнения электромагнитного момента дана на рис. 9:
![]()
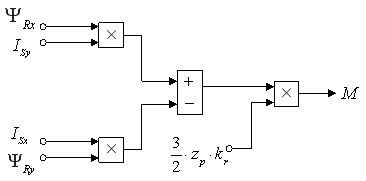
Рис. 9. Математическая модель электромагнитного момента M
Наконец для уравнения (6):
![]()
![]()
Структурная схема дана на рис. 10.
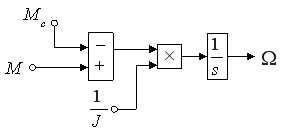
Рис. 10. Математическая модель уравнения движения
В работе [2] в главе 6 «Примеры» дан образец расчета параметров асинхронного двигателя. В наших дальнейших работах направленных на подготовку студентов к исследовательской работе, глава 6 окажет неоценимую помощь. Можно было бы по аналогии рассмотреть паспортные данные любого другого двигателя, но для проверки правильности выводов уравнений сделанных исследовательской группой самостоятельно, необходимо постоянно выходить на многие полученные результаты в работе [3]. Поэтому, этот пример расчета окажется очень полезным.
Номинальные данные:
Номинальный режим работыS1;
Номинальная мощность![]()
Номинальное фазное напряжение![]()
Номинальный фазный ток![]()
Номинальная частота![]()
Номинальная синхронная скорость![]()
Номинальная скорость ротора![]()
Номинальный КПД![]()
Номинальный коэффициент мощности![]()
Число пар полюсов![]()
Параметры Т-образной схемы замещения при номинальной частоте:
Активное сопротивление обмотки статора![]()
Индуктивное сопротивление рассеяния обмотки статора![]()
Активное сопротивление обмотки ротора, приведенное к статору![]()
Индуктивное сопротивление рассеяния обмотки ротора, приведенное статору![]()
Главное индуктивное сопротивление![]()
Суммарный момент инерции двигателя и механизма![]()
Базисные величины системы относительных единиц:
Напряжение![]()
Ток![]()
Частота![]()
Скорость ротора![]()
Сопротивление![]()
Потокосцепление![]()
Индуктивность![]()
Используя номинальные данные двигателя, определяем:
![]()
где ![]() – коэффициент, учитывающий различие значений электромагнитного момента и момента на валу двигателя в номинальном режиме (
– коэффициент, учитывающий различие значений электромагнитного момента и момента на валу двигателя в номинальном режиме (![]() ).
).

В качестве базисной мощности выбираем значение электромагнитной мощности двигателя в номинальном режиме, определяемое по следующей формуле:
![]()
Относительные значения параметров схемы замещения двигателя:
![]()
![]()
![]()
![]()
![]()
Механическая постоянная времени:
![]()
Номинальное значение скольжения:
![]()
Относительное значение номинальной скорости ротора:
![]()
Нормирующий энергетический коэффициент:
![]()
![]()
![]()
![]()
![]()
При расчете режимов работы, для того чтобы ![]()
![]()
![]()
![]() и
и ![]() необходимо откорректировать
необходимо откорректировать ![]()
![]()
где![]() – корректирующий коэффициент [2, с. 296].
– корректирующий коэффициент [2, с. 296].
![]() - коэффициент, показывающий отношение
- коэффициент, показывающий отношение ![]() к
к ![]() .
.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Основным отличием данной модели от модели двигателя, приведенного в работе [1], является то, что переменные ![]() и
и ![]() формируются на выходе интегрирующих звеньев. Это позволяет вынести расчет коэффициентов модели в отдельную подсистему (Raschetkoefficientov). В результате этого выноса остается оболочка из сумматоров, блоков перемножения и интеграторов (Obolochkadvigatela). Общая структура двигателя дана на рис. 11.
формируются на выходе интегрирующих звеньев. Это позволяет вынести расчет коэффициентов модели в отдельную подсистему (Raschetkoefficientov). В результате этого выноса остается оболочка из сумматоров, блоков перемножения и интеграторов (Obolochkadvigatela). Общая структура двигателя дана на рис. 11.
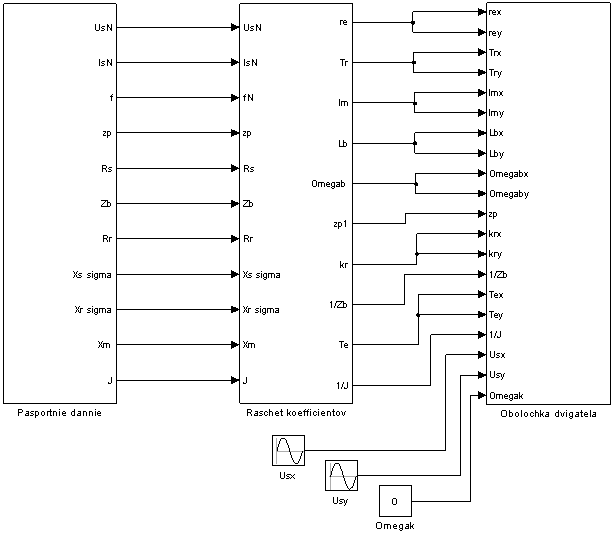
Рис. 11. Модель асинхронного двигателя
Оболочка двигателя дана на рис. 12.
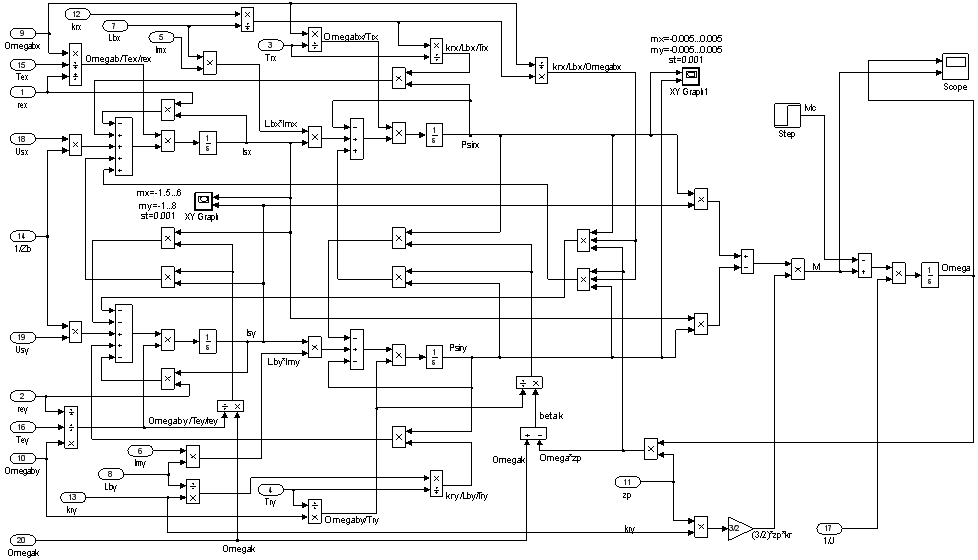
Рис. 12. Оболочка математической модели асинхронного двигателя с переменными ![]() —
— ![]() в системе абсолютных единиц
в системе абсолютных единиц
Ввод паспортных данных двигателя показан на рис. 13.
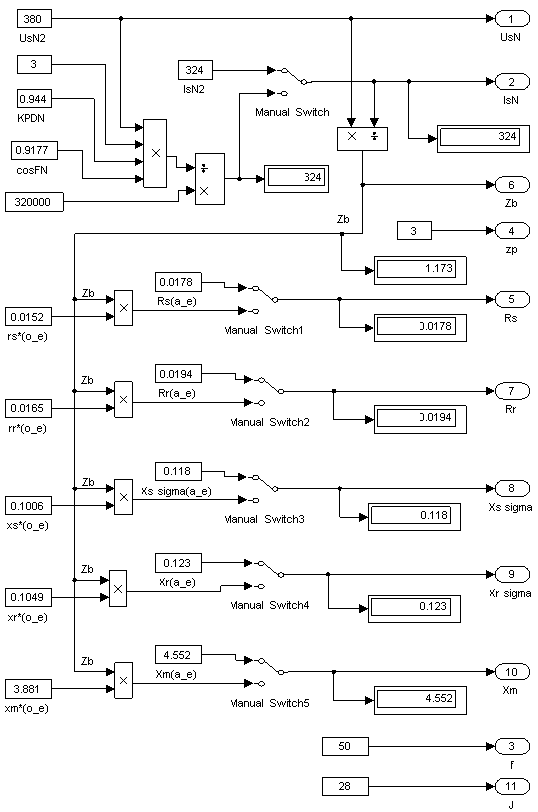
Рис. 13. Паспортные данные
Расчет коэффициентов осуществляется в подсистеме Raschetkoefficientov, приведенной на рис. 14.
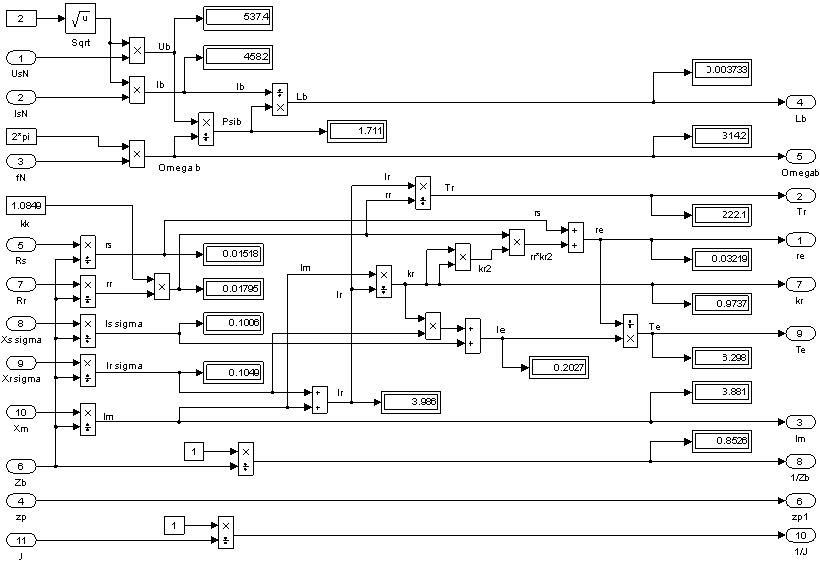
Рис. 14. Расчет коэффициентов
Результаты моделирования представлены на рис. 15.
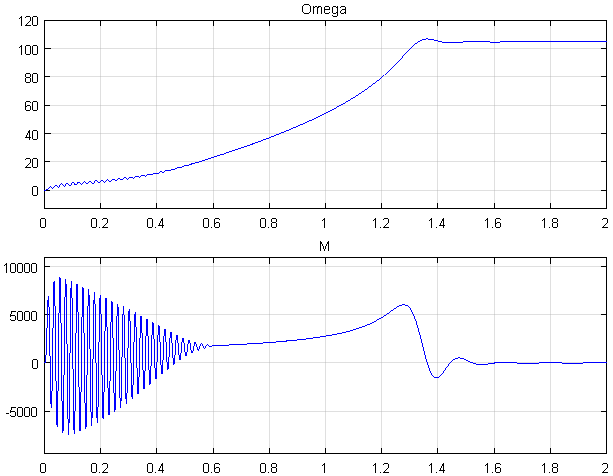
Рис. 15. Графики скорости и момента
Литература:
- Емельянов А. А., Бесклеткин В. В., Авдеев А. С., Габзалилов Э. Ф., Прокопьев К. В., Ситенков А. А. Математическая модель асинхронного двигателя с переменными ΨR – IS в системе абсолютных единиц // Молодой ученый. – 2016. – №10.
- Шрейнер Р. Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления: учеб. пособие / Р. Т. Шрейнер, А. В. Костылев, В. К. Кривовяз, С. И. Шилин. Под ред. проф. д. т. н. Р. Т. Шрейнера. – Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. – 361 с.
- Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. – Екатеринбург УРО РАН, 2000. – 654 с.

