




Математическое моделирование движения плоского шестизвенного внутритрубного робота

Авторы: Мальчиков Андрей Васильевич, Яцун Сергей Федорович
Рубрика: 7. Машиностроение
Опубликовано в
II международная научная конференция «Актуальные вопросы технических наук» (Пермь, февраль 2013)
Статья просмотрена: 1042 раза
Библиографическое описание:
Мальчиков, А. В. Математическое моделирование движения плоского шестизвенного внутритрубного робота / А. В. Мальчиков, С. Ф. Яцун. — Текст : непосредственный // Актуальные вопросы технических наук : материалы II Междунар. науч. конф. (г. Пермь, февраль 2013 г.). — Т. 0. — Пермь : Меркурий, 2013. — С. 58-62. — URL: https://moluch.ru/conf/tech/archive/73/3485/ (дата обращения: 28.04.2024).
В данной работе рассмотрена математическая модель шестизвенного плоского мобильного робота для мониторинга трубопроводов переменного сечения. Предложен оригинальный алгоритм расчета и показаны результаты численного моделирования движения звеньев с учетом моментов сил трения в шарнирных соединениях робота.
Введение. На сегодняшний день, изучению динамики многозвенных систем уделяется достаточно большое внимание [1–4]. В данной работе рассматривается математическая модель движения звеньев многозвенного мобильного робота, предназначенного для задач мониторинга внутренних поверхностей трубопроводов [5–6].
Описание конструкции и принципа перемещения робота. Робот представляет собой шестизвенную конструкцию. Звенья 1–6 соединены между собой посредством мотор-редукторов вращательного движения 7–11 (рис. 1.). Рассмотрим алгоритм перемещения устройства по вертикальному прямолинейному отрезку трубопровода.

Рис. 1. Фазы движения внутритрубного робота
Выделим 4 отдельные фазы движения робота: I фаза: режим силового удержания пары звеньев 5–6 и расклинивание пары звеньев 1–2 между стенок трубы; II фаза: режим силового удержания пары звеньев 1–2 и перемещение средней пары звеньев; III фаза: расклинивание пары звеньев 5–6 при силовом удержании пары звеньев 1–2; IV фаза: режим силового удержания пары звеньев 5–6 и перемещение средней пары звеньев.
Математическое моделирование процесса удержания робота за счет сил трения под действием переменных внешних сил описано в работах [7–8]. Рассмотрим математическое моделирование движения средних звеньев при их перемещении согласно алгоритму, приведенному на рис. 1. Особенностью рассматриваемой модели является учет моментов сил трения, действующих в шарнирах и представленных в виде сложных зависимостей от скоростей относительного вращения звеньев.
Математическая модель движения средних звеньев внутритрубного робота. Расчетная схема устройства показана на рис. 2.
Рис. 2. Расчетная схема робота в режиме перемещения средних звеньев
На данном рисунке: звенья 1 и 2 осуществляют фиксацию робота внутри трубопровода за счет сил трения. Точку А3 считаем неподвижной. Введем неподвижную систему координат с центром в точке А3, при этом ось А3Y направлена по линии действия силы тяжести. Звенья 3 и 4 осуществляют перемещение переднего фиксирующего модуля (звенья 5 и 6) под действием крутящих моментов M23 и M34. Со стороны верхнего ФМ на звенья действуют крутящий момент M45 и сосредоточенная сила F5 приложенная под углом
 в точке А5.
Примем, что центры масс звеньев A3А4
и A4А5
расположены в их
геометрических центрах O3,
O4.
Системы координат X3Y3O3
и X4Y5O4
связаны с центрами масс звеньев.
в точке А5.
Примем, что центры масс звеньев A3А4
и A4А5
расположены в их
геометрических центрах O3,
O4.
Системы координат X3Y3O3
и X4Y5O4
связаны с центрами масс звеньев.В качестве обобщенных координат примем углы поворота звеньев относительно их центров масс
 и
якорные токи
и
якорные токи
 ,
электроприводов расположенных в местах соединений звеньев 2, 3
и 3, 4 соответственно. Для описания динамики движения звеньев
запишем дифференциальные уравнения, основываясь на уравнениях
Лагранжа 2-го рода. Для описания процессов происходящих
в электроприводах запишем второй закон Кирхгофа для цепи якоря,
а момент развиваемый приводом представим как произведение
моментного коэффициента двигателя
,
электроприводов расположенных в местах соединений звеньев 2, 3
и 3, 4 соответственно. Для описания динамики движения звеньев
запишем дифференциальные уравнения, основываясь на уравнениях
Лагранжа 2-го рода. Для описания процессов происходящих
в электроприводах запишем второй закон Кирхгофа для цепи якоря,
а момент развиваемый приводом представим как произведение
моментного коэффициента двигателя
 на ток якоря [7].
на ток якоря [7].Система дифференциальных уравнений, описывающая движения робота, будет иметь вид:
|
|
(1) |
В этих уравнениях:
 —
масса j-того
звена;
—
масса j-того
звена;
 -
длина j-того
звена;
-
длина j-того
звена;
 -
угол приложения внешней силы (равен 0 — сила приложена
вертикально вниз)
-
угол приложения внешней силы (равен 0 — сила приложена
вертикально вниз)
 -момент
инерции j-тых
звеньев;
-момент
инерции j-тых
звеньев;
 -
момент инерции электродвигателя; Lя,j
и rя,j —
индуктивность и сопротивление цепи якоря;
-
момент инерции электродвигателя; Lя,j
и rя,j —
индуктивность и сопротивление цепи якоря;
 и
и
 —
электрический и электромеханический коэффициенты
пропорциональности для j-того
двигателя; Uj —
управляющее напряжение на j-том
двигателе,
—
электрический и электромеханический коэффициенты
пропорциональности для j-того
двигателя; Uj —
управляющее напряжение на j-том
двигателе,
 —
передаточное отношение редуктора
—
передаточное отношение редуктора
 —
общий КПД электродвигателя.
—
общий КПД электродвигателя.Рассмотрим моменты
 и
и
 .
Представим момент сопротивления как:
.
Представим момент сопротивления как:
|
|
(2) |
где
![]() -
коэффициент вязкого сопротивления,
-
коэффициент вязкого сопротивления,
![]() —
суммарный момент сил трения в j-том
шарнире, определяемый следующим образом:
—
суммарный момент сил трения в j-том
шарнире, определяемый следующим образом:
|
|
(3) |
где
 –
равнодействующая всех внешних моментов для j-того
шарнира, кроме моментов сил сухого трения;
–
равнодействующая всех внешних моментов для j-того
шарнира, кроме моментов сил сухого трения;
 —
предельное значение силы трения, определяемая действующими силами
в шарнире и коэффициентом силы трения, в данном
случае, может быть определена экспериментально, для конкретно
взятого привода;
—
предельное значение силы трения, определяемая действующими силами
в шарнире и коэффициентом силы трения, в данном
случае, может быть определена экспериментально, для конкретно
взятого привода;
 —
относительная скорость вращения между j-тым
и j-1
звеньями. Для получения численного решения систем уравнений (1–3),
был предложен оригинальный алгоритм интегрирования, позволяющий
моделировать движение робота.
—
относительная скорость вращения между j-тым
и j-1
звеньями. Для получения численного решения систем уравнений (1–3),
был предложен оригинальный алгоритм интегрирования, позволяющий
моделировать движение робота.Согласно принятому алгоритму перемещения робота, существуют два этапа движения: удлинение корпуса робота (при этом
 );
и сжатие корпуса робота (при этом
);
и сжатие корпуса робота (при этом ),
где угол
),
где угол
 -
определяется как:
-
определяется как:
 ,
,
где d — диаметр поперечного сечения трубы.
САУ формирует управляющее напряжение Uj для двигателей в зависимости от задающих значений угла поворота
 .
Задающие значения формируются в САУ в зависимости от
текущей конфигурации устройства и геометрии трубопровода.
Фактическое относительное перемещение звеньев
.
Задающие значения формируются в САУ в зависимости от
текущей конфигурации устройства и геометрии трубопровода.
Фактическое относительное перемещение звеньев ,
фиксируется потенциометрическими датчиками угла поворота. Определяет
уровень управляющего напряжения:
,
фиксируется потенциометрическими датчиками угла поворота. Определяет
уровень управляющего напряжения:
|
|
(4) |
где
 —
пропорциональный коэффициент регулятора.
—
пропорциональный коэффициент регулятора.
Результаты моделирования движения робота. Моделирование проводилось при следующих исходных параметрах системы (табл. 1).
Таблица 1
|
Наименование параметра |
Обозначение |
Единица измерения |
Значение |
|
Массы звеньев |
mj |
кг |
0,05 |
|
Длины звеньев |
lj |
м |
0,1 |
|
Предельный момент силы трения в шарнире* |
|
Нм |
0,0005 |
|
Вязкое сопротивление в шарнире* |
|
- |
0,1 |
|
Индуктивность цепи якоря** |
|
Гн |
0,0003 |
|
Активное сопротивление якоря* |
rя,j |
Ом |
5,4 |
|
Электрическая постоянная времени электродвигателя** |
|
- |
0,005 |
|
Моментный коэффициент электродвигателя** |
|
- |
1,5 |
|
Передаточное число редуктора |
|
- |
50 |
|
КПД привода |
|
- |
0,6 |
|
|||
В процессе моделирования значения углов:
 и
и
 определялись следующим образом:
определялись следующим образом:
Результаты математического моделирования представлены в виде временных диаграмм (рис. 3–5).
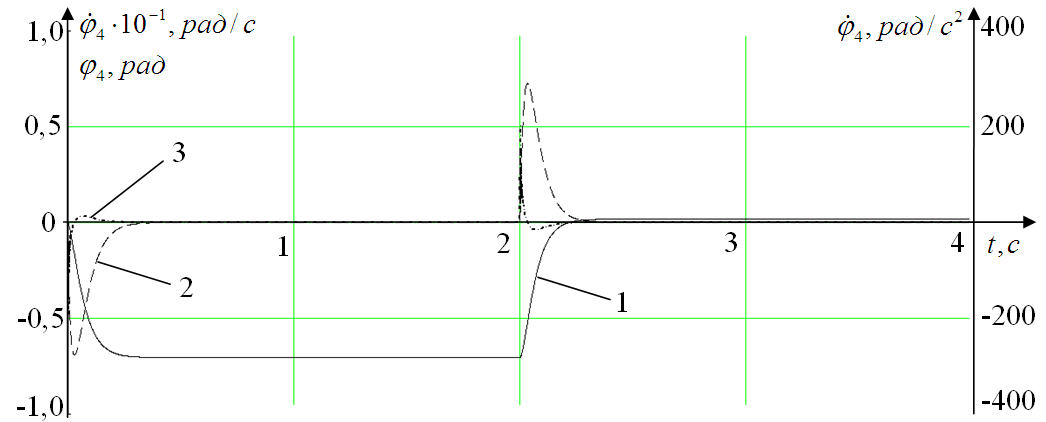
Рис. 3. Параметры перемещения 3-го звеньев робота. 1 — перемещение, 2 — угловая скорость, 3 — угловое ускорение

Рис. 4. Параметры перемещения 4-го звеньев робота .1 — перемещение, 2 — угловая скорость, 3 — угловое ускорение
-
На рис.5. показаны временные диаграммы, характеризующие изменение электрических параметров электродвигателей в процессе перемещения звеньев робота.
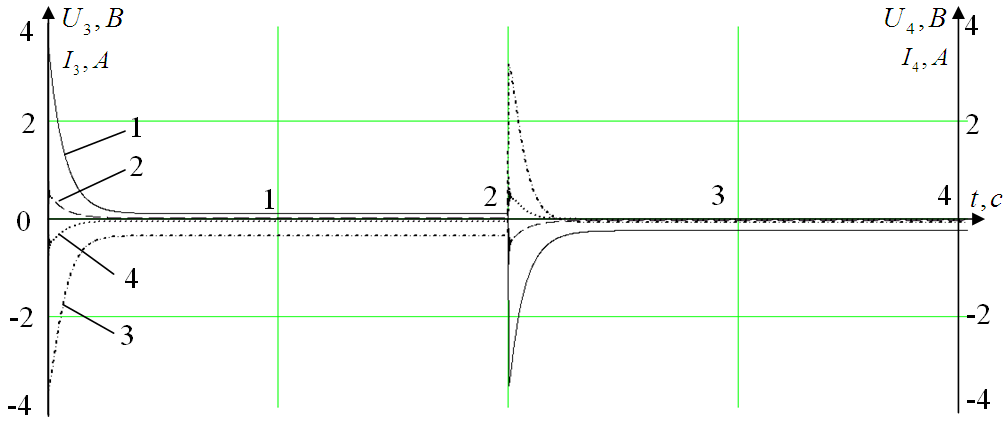
Рис. 5. Параметры энергопотребления приводов робота. 1 — напряжение на 3-ем приводе, 2 — ток на 3-ем приводе, 3 — напряжение на 4-ем приводе, 4 — ток на 4-ем приводе
-
Выводы. В работе представлена математическая модель движения мобильного робота. Предложен оригинальный алгоритм, численного решения системы для уравнений, описывающих механические и электромеханические эффекты, возникающие в процессе движения звеньев. Математическое моделирование позволило получить закономерности изменения динамических параметров звеньев робота, для различных параметров САУ электроприводов. Установлено, что время перехода звена в заданное положение составляет в среднем 400мс, при этом развиваемые угловые скорости достигают значений 8 с-1, а угловые ускорения до 250 с-2. Управляющее напряжение, в процессе перемещения, не превышает номинального значения, равного 4.8 В. Пиковое значение тока в обмотках электродвигателя кратковременно достигает значения 0.5А, однако в среднем значение оценивается как 70мА, что соответствует номинальному току для данного типа приводов.
Литература:
Veshnikov V., Gradetsky V., Chaschuhin V. Computer modeling of the crawling robot motion inside a pipeline. // Proceedings of the 4-th International Workshop on Computer Science and Information Technologies CSIT — 02, Patras, Greece, September 18–20, 2002.
E.Gambao, M. Hernando and A. Brunete,Multiconfigurable Inspection Robots for Low Diameter Canalizations, ISARC 2005 — September 11–14, 2005
3. Болотник Н. Н., Костин Г. В., Черноусько Ф. Л. Движение шагающего аппарата в тороидальной трубе // Изв. РАН. Механика твердого тела, 1998, № 4, с. 86–101
Jatsun S., Zimmerman K., Zeigis I., Jatsun A. “Vibration driven robots for in pipe inspection”, Proceedings of International Conference on Mechatronics. Kumamoto, 2007, pp. 237–249.
Мальчиков А. В., Математическое моделирование адаптивного внутритрубного робота // XXIII Международная инновационно-ориентированная конф. молодых ученых и студентов: мат. конф. — Москва ИМАШ РАН, 2011. С. 117.
Мальчиков А. В., Адаптивный робот для перемещения по трубопроводам переменного диаметра, «Мехатроника, робототехника: современное состояние и тенденции развития» сб. науч. ст. Всерос. науч. школы для молодежи// ЮЗГУ, Курск, 2011, С. 110–118
Мальчиков А. В., Автоматизированный мобильный комплекс для диагностики трубопроводов переменного диаметра, / А. В. Мальчиков, С. Ф. Яцун, Автоматизация и современные технологии, № 12. М, 2012. — С 3–8
Мальчиков А. В. Динамические опорные элементы ползающих роботов для движения по наклонным поверхностям/ А. В. Мальчиков, С. Ф. Яцун, А. И. Жакин/ Известия Юго-Западного государственного университета, № 2 (41). Ч.1. Курск, 2012. С.89–95