





Введение дополнительных избыточных степеней подвижности — один из эффективных путей оптимизации движений манипулятора. В работе рассматривается совершенствование стратегии управления малыми движениями конечной точки манипулятора в терминах минимизации, мощности и максимизации ускорения двухзвенного плоского механизма. Анализ показал, что при введенных ограничениях ни одна конструкция механизма не обеспечивает одновременно максимизации ускорения и минимизации потребной мощности.
Ключевые слова: манипулятор, управление, кинематическая избыточность
Представлена стратегия максимального расширения полосы пропускания двухзвенного механизма малых движений в одном направлении.
Для этого случая избыточность понимается в том смысле, что малые движения в направлении ![]() , как показано на рис.1, могут достигаться путем изменения по определенному закону углов
, как показано на рис.1, могут достигаться путем изменения по определенному закону углов ![]() за счет введения соответствующих управляющих воздействий. Разрабатываемая стратегия включает в себя распределение движения между
за счет введения соответствующих управляющих воздействий. Разрабатываемая стратегия включает в себя распределение движения между ![]() и
и ![]() , а также оптимальный выбор длин звеньев
, а также оптимальный выбор длин звеньев ![]() и
и ![]()
Система рассматривается как линейная, поскольку не учитываются кориолисовы силы и центробежные ускорения. Это предположение допустимо в окрестности номинальной конфигурации ![]() . Линейный под ход позволяет также использовать постоянные преобразования между параметрами движения сочленений и движением выходного звена, а так же между параметрами движения сочленений и действующими в них крутящими моментами.
. Линейный под ход позволяет также использовать постоянные преобразования между параметрами движения сочленений и движением выходного звена, а так же между параметрами движения сочленений и действующими в них крутящими моментами.
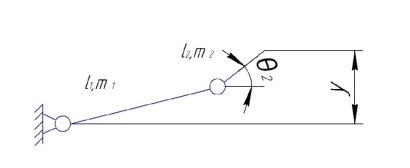
Рис. 1. Кинематическая схема
Качество системы будет измеряться шириной поносы возможных синусоидальных колебаний конечной точки механизма. В общем случае это компромисс между точностью абсолютного положения манипулятора и абсолютной величиной усилия, которое зависит от импеданса манипулятора и окружающей его среды. Увеличение полосы пропускания должно повысить эффективность управления, как по усилию, так и по положению. Это особенно важно для быстрой коррекции ошибок в этих контурах управления.
Исследуется поведение механизма в окрестностях номинальной конфигурации ![]() , которая является центром рабочей области для движения с избыточностью. Величина рабочей зоны выбирается с цепью ограничения углового перемещения звена 2 относительно звена 1 так, что
, которая является центром рабочей области для движения с избыточностью. Величина рабочей зоны выбирается с цепью ограничения углового перемещения звена 2 относительно звена 1 так, что
 (1)
(1)
Ограничение ![]() позволяет использовать линейные методы анализа, а также ограничивает величину отклонений от номинальной конфигурации, вызванных влиянием возмущений» Введенное определение малых движений ограничивает величину перемещений по оси у величиной + 5 % общей длины механизма. Рассматриваются два подхода к улучшению динамических характеристик. Первый включает поиск условий минимальных затрат мощности на синусоидальное движение концевой точки механизма. Мгновенное значение потребной мощности для синусоидального движения постоянной амплитуды и частоты со определяется из выражения
позволяет использовать линейные методы анализа, а также ограничивает величину отклонений от номинальной конфигурации, вызванных влиянием возмущений» Введенное определение малых движений ограничивает величину перемещений по оси у величиной + 5 % общей длины механизма. Рассматриваются два подхода к улучшению динамических характеристик. Первый включает поиск условий минимальных затрат мощности на синусоидальное движение концевой точки механизма. Мгновенное значение потребной мощности для синусоидального движения постоянной амплитуды и частоты со определяется из выражения
![]() (2)
(2)
![]() - симметрическая матрица моментов инерции звеньев относительно центров шарниров
- симметрическая матрица моментов инерции звеньев относительно центров шарниров
Альтернативный подход к улучшению рабочих характеристик механизма связан с поиском возможного максимума ускорения в направлении ![]() .
.
Для механизма, показанного на рис. 1, ускорение концевой точки находится из уравнения
![]() (3)
(3)
Конструирование механизма начинается с выбора относительного движения двухзвенного механизма. Простейший, метод состоит в определении постоянной, связывающей движения в двух шарнирах. Для максимизации характеристик, описанных уравнениями (2) и (3), предлагается использовать коэффициенты оптимальной угловой скорости в шарнирах, исходя из параметров механизма. Процедура точного определения длин звеньев механической системы с избыточностью строится на совместном использовании оптимальных угловых коэффициентов и рассмотренных выше ограничений. Вводится обозначение углового коэффициента ![]() . Это обозначение остается справедливым и для производных от
. Это обозначение остается справедливым и для производных от ![]() и
и ![]() . Для фиксированного значения амплитуды концевой точки
. Для фиксированного значения амплитуды концевой точки ![]()
![]() (4)
(4)
Ограничив в уравнении (2) переменные
![]() (5)
(5)
Определим ![]() как коэффициент углового ускорения, полученный для фиксированных значений передаточных отношений
как коэффициент углового ускорения, полученный для фиксированных значений передаточных отношений ![]() и
и ![]() крутящих моментов на валах двигателей
крутящих моментов на валах двигателей ![]() и
и ![]()
![]() (6)
(6)
Выбор постоянных угловых коэффициентов позволяет использовать линейные методы анализа.
Объединив уравнения (4), (2) и (3) и продифференцировав по ![]() можно показать, что минимум энергетических затрат и максимум ускорения достигаются в пределе, когда
можно показать, что минимум энергетических затрат и максимум ускорения достигаются в пределе, когда ![]() стремится к нулю. Следовательно, выбор
стремится к нулю. Следовательно, выбор ![]() будет зависеть от следующих ограничений, накладываемых на систему: угловой коэффициент
будет зависеть от следующих ограничений, накладываемых на систему: угловой коэффициент ![]() ; фиксированная длина механизма
; фиксированная длина механизма ![]() ; малое перемещение; максимальное угловое перемещение. Нижняя допустимая граница
; малое перемещение; максимальное угловое перемещение. Нижняя допустимая граница ![]() находится, из выражения
находится, из выражения
![]() (7)
(7)
Таким образом, оптимальная длина звеньев — это наименьшая длина, удовлетворяющая данным критериям ускорения или мощности с учетом ограничений, выраженных уравнением (7).
Выбор параметров системы должен производиться на основе критериев, минимизирующих потребную мощность и максимизирующих ускорение, Предполагается, что масса тонких цилиндрических звеньев двухзвенного плоского механизма пропорциональна их длине. Введение матрицы П позволяет учесть влияние приведенного момента инерции двигателя, Кроме критериев рабочих характеристик, выраженных уравнениями (2) и (3), для определения полного набора конструктивных параметров учитываются ограничения по уравнению (7), Эти уравнения решаются для трех различных случаев.
- Однозвенная система, которая представляется как базис для сравнения характеристик различных конструкций двухзвенных механизмов
-
Выбор конструктивных параметров механизма на основе минимизации потребляемой мощности. Для этого используется уравнение (2). На первом этапе учитывается только инерционность звена. Уравнение (2) может быть нормализовано (L=1) и выражено в терминах
 .
.
-
Выбор параметров механизма путем определения максимума ускорения концевой точки в направлении

- Выбор параметров механизма на основе комбинированного критерия.
В случаях 2 и 3 ускорение концевой точки определялось главным образом угловым ускорением второго звена. В предположении постоянства коэффициента углового ускорения ![]() крутящий момент в шарнире 2 можно выразить
крутящий момент в шарнире 2 можно выразить
![]() (8)
(8)
где
Трактуя звено 2 как скалярную систему, можно подобрать ![]() . Можно выбрать приведенные крутящие моменты двигателей так, чтобы для данной статической нагрузки требовались равные крутящие моменты двигателей т. е.
. Можно выбрать приведенные крутящие моменты двигателей так, чтобы для данной статической нагрузки требовались равные крутящие моменты двигателей т. е.
![]() (9)
(9)
Выбор приведенных моментов инерции ![]() по уравнению (9) обеспечивает равное возбуждение двигателей каждого звена. При этом оба двигателя одновременно достигают предела насыщения крутящего момента. В этом случае достигается равенство
по уравнению (9) обеспечивает равное возбуждение двигателей каждого звена. При этом оба двигателя одновременно достигают предела насыщения крутящего момента. В этом случае достигается равенство ![]() . Таким образом, наиболее эффективное движение механизма имеет место при равном возбуждении обоих двигателей. Представленные в работе расчетные параметры конструкции двухзвенного механизма выше, чем параметры однозвенного механизма для режиме малых перемещений. Отмечается наличие альтернативных вариантов в выборе методов оптимизации. Стандартный подход к конструированию механизма — поиск максимума ускорения. При этом приведенный момент инерции двигателя каждого звена согласуется с моментом инерции звеньев, и к каждому звену подводится равное количество энергии. Результирующее движение требует больших перемещений сочленения 1.
. Таким образом, наиболее эффективное движение механизма имеет место при равном возбуждении обоих двигателей. Представленные в работе расчетные параметры конструкции двухзвенного механизма выше, чем параметры однозвенного механизма для режиме малых перемещений. Отмечается наличие альтернативных вариантов в выборе методов оптимизации. Стандартный подход к конструированию механизма — поиск максимума ускорения. При этом приведенный момент инерции двигателя каждого звена согласуется с моментом инерции звеньев, и к каждому звену подводится равное количество энергии. Результирующее движение требует больших перемещений сочленения 1.
Минимизация потребной мощности рациональна при выборе ![]() и
и ![]() . При этом резко уменьшается частота включения двигателя звена 1. Таким образом, случай 4 сочетает в себе достоинства обоих методов. Максимизация углового ускорения движения в сочленении 2 обеспечивает высокое ускорение, а выбор низкого значения приведенного крутящего момента двигателя звена 1 уменьшает общую потребную мощность для данного движения. Правильный выбор приведенного момента инерции (уравнение (9)) приводит к такой конструкции, в которой управляемый крутящий момент обеспечивает одновременно максимум ускорения и движение с наивысшим к. п.д.
. При этом резко уменьшается частота включения двигателя звена 1. Таким образом, случай 4 сочетает в себе достоинства обоих методов. Максимизация углового ускорения движения в сочленении 2 обеспечивает высокое ускорение, а выбор низкого значения приведенного крутящего момента двигателя звена 1 уменьшает общую потребную мощность для данного движения. Правильный выбор приведенного момента инерции (уравнение (9)) приводит к такой конструкции, в которой управляемый крутящий момент обеспечивает одновременно максимум ускорения и движение с наивысшим к. п.д.
Для реализации преимуществ избыточности, обеспечивающих высокую частоту отработки управляющих сигналов при движении по оси ![]() , предлагается метод, использующий оптимальный угловой коэффициент
, предлагается метод, использующий оптимальный угловой коэффициент ![]() . Для этого первоначально определяется тип матрицы Якоби, на основе которой проводятся достоверные измерения и управление внешними и внутренними движениями механизма. Вблизи
. Для этого первоначально определяется тип матрицы Якоби, на основе которой проводятся достоверные измерения и управление внешними и внутренними движениями механизма. Вблизи![]() отклонение в направлении
отклонение в направлении ![]() представляется в виде:
представляется в виде:![]() . Поскольку движение в направлении х невозможно, якобиан представляется вырожденной матрицей. Выражение для нулевого или внутреннего движения имеет вид:
. Поскольку движение в направлении х невозможно, якобиан представляется вырожденной матрицей. Выражение для нулевого или внутреннего движения имеет вид: ![]() . Движение в пространстве сочленений ортогонально к отклонению
. Движение в пространстве сочленений ортогонально к отклонению ![]() . Это позволяет движение в пространстве сочленений
. Это позволяет движение в пространстве сочленений ![]() преобразовать во внешнее движение
преобразовать во внешнее движение![]() , с помощью невырожденной матрицы Якоби
, с помощью невырожденной матрицы Якоби
 (10)
(10)
Это преобразование имеет вид: ![]()
Вводится дополнительное ![]() - пространство. Движение в направлении оси
- пространство. Движение в направлении оси ![]() системы координат этого пространства требует, чтобы движение системы характеризовалось
системы координат этого пространства требует, чтобы движение системы характеризовалось ![]() . В этом случае движение в направлении
. В этом случае движение в направлении ![]() будет эффективным, а движение вдоль оси
будет эффективным, а движение вдоль оси ![]() неэффективным. Определив
неэффективным. Определив ![]() и
и
![]() (12)
(12)
можно определить преобразование ![]() пространства в пространство сочленения как
пространства в пространство сочленения как
На рис.2 показаны базовые векторы двух пространств. Пространство сочленений ![]() используется как исходная система координат. Эффективное выполнение движений в направлении
используется как исходная система координат. Эффективное выполнение движений в направлении ![]() требует управления отклонением в направлении
требует управления отклонением в направлении ![]() . Причем движение по
. Причем движение по ![]() требует больших отклонений в направлении
требует больших отклонений в направлении ![]() . Для разрешения этого противоречия рассматривается эллипс
. Для разрешения этого противоречия рассматривается эллипс ![]() на рис.2. Каждая точка эллипса представляет множество скоростей сочленения, удовлетворяющих уравнению
на рис.2. Каждая точка эллипса представляет множество скоростей сочленения, удовлетворяющих уравнению
![]() (14)
(14)
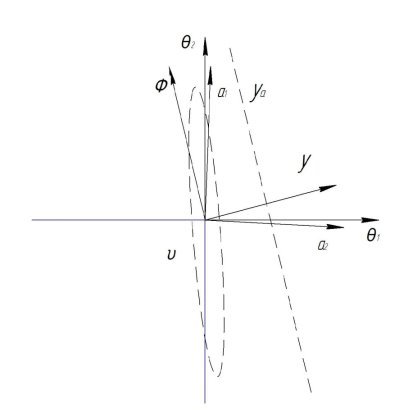
Рис. 2.
где Е — постоянный уровень энергии. Точки на эллипсе представляют скорости в пространстве сочленения, достижимые при фиксированном количестве энергии. Для данного количества энергии большие скорости могут достигаться вдоль главной оси этого эллипса, а не по направлению![]() . Однако это направление обеспечивает малые отклонения по
. Однако это направление обеспечивает малые отклонения по ![]() . Таким образом, направление, полученное на основании уравнения (5), обеспечивает наилучшее соотношение скоростей, при котором достигается отклонение концевой точки механизма в направлении
. Таким образом, направление, полученное на основании уравнения (5), обеспечивает наилучшее соотношение скоростей, при котором достигается отклонение концевой точки механизма в направлении ![]() с наименьшей потребной мощностью.
с наименьшей потребной мощностью.
Линия ![]() на рис.2 представляет собой геометрическое место точек необходимых перемещений шарнира для достижения перемещения
на рис.2 представляет собой геометрическое место точек необходимых перемещений шарнира для достижения перемещения ![]() на которые накладываются различные по величине нулевые отклонения. Для достижения этих отклонений следует двигаться в направлении
на которые накладываются различные по величине нулевые отклонения. Для достижения этих отклонений следует двигаться в направлении ![]() до момента достижения
до момента достижения ![]() . Далее система управления компенсирует нулевую составляющую и возвращает механизм к положению, при котором
. Далее система управления компенсирует нулевую составляющую и возвращает механизм к положению, при котором ![]() . [1–3]
. [1–3]
Анализ показал, что при введенных ограничениях ни одна конструкция механизма не обеспечивает одновременно максимизации ускорения и минимизации потребной мощности. В некоторой степени это требование может удовлетворяться введением, дополнительных сочленений.
Литература:
- Поезжаева Е. В. Промышленные роботы: учеб.пособие: в 3 ч./ Е. В. Поезжаева. — Пермь Изд-во Пермь.гос, тех. ун-та, 2006.- Ч.1.-64 с.
- Зенкевич С. Л., Ющенко А:.С. Управление роботами.- М.:Изд-во МГОУ им. Н. Э. Баумана, 2006.
- Корендясев А. И. Теоретические основы робототехники: в 2 кн./ А. И. Корендясев, Б. Л. Саламандра, Л. И. Тывес; отв. Ред. С. М. Каплунов.– М.:Наука,2006.
