Население Земли неуклонно растет. По данным фонда ООН, в области народонаселения [1] основные вехи численности населения Земли были пройдены в следующих годах:
– 1 миллиард — 1804 год;
– 2 миллиарда — 1927 год (через 123 года)
– 3 миллиарда — 1960 год (через 33 года)
– 4 миллиарда — 1974 год (через 14 лет)
– 5 миллиардов — 1987 год (через 13 лет)
– 6 миллиардов — 12 октября 1999 года (через 12 лет)
– 7 миллиардов — 31 октября 2011 года (через 12 лет)
По прогнозу экспертов ООН, в 2050 г. население нашей планеты будет составлять 9,8 млрд. чел., а в 2100 г. — 11,2 млрд человек.
Естественные ресурсы для традиционного сельского хозяйства и рыболовства ограничены, поэтому на первый план выходят новые технологии в области получения животного белка, в том числе садковой аквакультуры.
Опыт таких стран, как Китай и Норвегия, где развита аквакультура, показывает, что выращивать рыбу можно больше, чем вылавливать в море. Например, Китай добывает и выращивает рыбы больше всех в мире. Вылавливает около 30 млн тонн, а выращивает около 50 млн тонн [2]. Россия, которая имеет больше площадей морей и океанов, на порядки отстает.
Для того чтобы догнать передовые страны мира и стать конкурентоспособными, нам необходимы инновационные решения в области морской аквакультуры.
Одной из самых важных задач при выращивании больших объемов продукции рыбоводства является механизация и автоматизация процессов, в том числе кормления. Решение такой проблемы невозможно в рамках одной дисциплины (науки), поэтому данная работа включает в себя несколько дисциплин, основными из которых являются биология и физика.
Целью настоящей работы является предложение инновационной схемы автоматизации кормления рыб в морских садках.
Для достижения поставленной цели определены следующие задачи:
1) провести анализ существующих в мире систем кормления рыб в морских садках аквакультуры;
2) выявить существующие проблемы в современных хозяйствах аквакультуры в области кормления рыб;
3) на основании теоретических разработок предложить инновационную схему автоматической кормушки.
- Материал и методика
Материалом для данной работы послужили опубликованные данные по морской садковой аквакультуре и особенностям кормления рыб в хозяйствах марикультуры.
В настоящей проектной работе рассматриваются только системы для кормления нагульной части рыбного стада, хотя в той или иной мере они вполне могут быть применены для кормления личинок и молоди.
На данном этапе использованы в основном теоретические методы исследования: анализ и синтез; исторический; логический; моделирование; математический.
Выбор материала и методик связан с тем, что автор в будущем после этой теоретической разработки планирует продолжить работу над проектом на практике.
- Анализ существующих систем кормления рыб в морских садках аквакультуры
Кормление рыб в хозяйствах аквакультуры проходит свой эволюционный путь.
В раннем своем развитии рыбоводные хозяйства осуществляли кормление рыб вручную, путем внесения в воду живого или свежего корма. Такой способ, конечно, был малопроизводительным, потому что так можно было накормить небольшое количество рыб либо привлечь для кормления большое количество людей. Кроме того, дозировка была не совершенна, и рыба могла недоедать. Либо образовывались излишки корма, которые скапливались на дне водоема и ухудшали его гидрохимический режим. Значительное загрязнение приводило к ухудшению условий содержания рыбы.
Следующим этапом в совершенствовании кормления рыб было изобретение механических кормушек, которые получили наибольшее развитие с изобретением сухого гранулированного корма. В емкости (бункеры и др.) засыпался корм и затем, когда наступало время кормления, работник включал механизм, который осуществлял высыпание корма в водоем. Такие системы модифицировались, и появлялись кормушки с разбрасыванием корма на бо́льшую площадь. Такие кормушки могли обеспечить кормление относительно большого стада рыб с участием небольшого количества людей.
Однако проблемы оставались, в том числе с дозировкой кормления.
Отчасти проблему решали маятниковые механические кормушки типа «Рефлекс», принцип которых основан на том, что рыбу приучали при потребности в корме нажимать на лопасть, которая открывала отверстие кормушки, через которое высыпалась определенная доза корма (рис. 1).
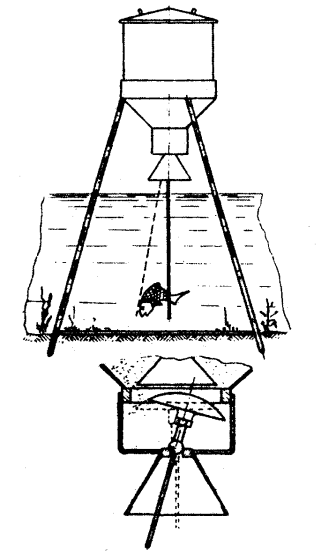
Рис. 1. Механическая маятниковая кормушка рыб (http://www.websadovod.ru/fish/25.htm)
Таким образом, во-первых, решалась проблема присутствия человека во время кормления, во-вторых, рыба ела тогда, когда была голодна. Но наблюдения и статистический анализ показали, что при переходе рыбы на такой тип питания и в ходе эксплуатации таких кормушек весовой прирост рыб был несколько меньше, чем при других видах кормления. Кроме того, такой тип кормления допустим для небольших пресноводных прудовых и садковых морских хозяйств. Для большого стада рыб такой тип кормления технически не состоятелен.
Также негативным моментом является то, что корм высыпается при случайном контакте с рыбой, и чем выше плотность посадки, тем больше вероятности потерь корма.
С научно-техническим прогрессом человечества в рыбоводстве появились автоматические системы кормления рыб. Сейчас в передовых странах мира существуют аналоги российским автоматическим системам кормления «Салмо Корм» и «Салмо Солар». Это автономные программируемые системы кормления. Засыпанный в большие бункеры гранулированный корм подается в определенное время с определенной дозировкой.
Может быть запрограммирована любая периодичность кормления и установлена любая дозировка. Управление возможно от пульта дистанционно, без проводов. Существуют системы с автоматическими анализаторами качества воды и видеонаблюдением за процессом кормления. Деятельность человека сводится только к обслуживанию системы и работе оператора по обработке данных анализаторов и видеонаблюдения.
- Инновационное предложение для оптимизации кормления рыб в морских садках
В современном мире многие открытия совершаются на стыке наук. Настоящая работа также является результатом междисциплинарных исследований — прежде всего биологии и физики.
Биологическая составляющая представлена соответствующими разделами ихтиологии, изучающими поведение рыб, их питание и рост. Физика в значительной степени представлена разделами, описывающими свойства воды и принципиальную схему автоматической системы кормления.
Питание рыб испытывает изменения в зависимости от возраста, физиологического состояния [3], внешних биотических и абиотических факторов. Эти изменения могут быть межгодовыми, сезонными, суточными и внутрисуточными. Одна и та же рыба в садках в один день может съедать больше корма, чем в другой день. Ритмику питания не всегда можно прогнозировать. Особенно это касается межсуточных колебаний [4].
Во время кормления рыба собирается к местам подачи корма и образует плотные скопления. При этом животные активно двигаются, стараясь схватить кормовые гранулы. По мере насыщения интерес к пище пропадает, и скопления рыб рассеиваются.
Рыба питается в разном диапазоне глубин, поэтому видеонаблюдение не может позволить оператору определить, когда произошло насыщение и подача корма должна быть прекращена. Поэтому в хозяйствах аквакультуры подача корма осуществляется дозировано на основе сведений о рационе того или иного вида рыб в данный сезон с поправкой на собственный опыт.
Несмотря на появление современных высокотехнологичных автоматических систем кормления из-за асинхронной ритмики питания рыб в хозяйствах аквакультуры сохраняется проблема с оптимальной дозировкой, которая исключала бы недоедание либо перерасход корма. В первом случае хозяйство теряет прирост биомассы рыбы, а значит, недополучает прибыль. А во втором перерасход корма означает излишние финансовые вложения в корма и ухудшение экологической обстановки водоема, а значит, и условий обитания рыбы, все это тоже влечет снижение возможной прибыли хозяйства аквакультуры. Корма — самая крупная статья затрат в хозяйстве аквакультуры (не менее 2/3 от всех операционных затрат). Поэтому рациональное кормление — одна из первоочередных задач.
В промысловой практике уже давно применяются приборы для обнаружения рыбы в водоеме. Это эхолоты, картплоттеры, многофункциональные приборы и т. д. Современные приборы с цифровой обработкой сигнала способны четко идентифицировать дно, отдельных рыб и стаи. Возможность определять размеры объектов позволяют различать сигнал от рыб и от вносимого в водоем корма. С помощью многолучевых приборов мы имеем возможность обнаруживать рыб на разных глубинах — практически от поверхности до дна, на глубине до 700 м и больше.
Суть инновационной идеи состоит в следующем.
Используя технические средства (рис. 2), способные определять скопления рыб во время кормления, автоматически регулировать подачу корма в садки до момента насыщения.
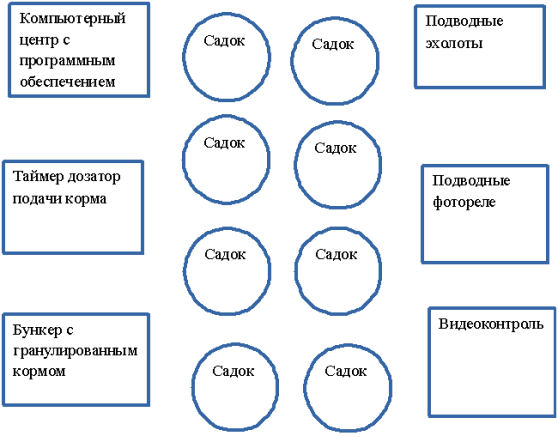
Рис. 2. Принципиальная схема системы кормления рыб в хозяйстве аквакультуры
Автоматизм достигается путем определенного алгоритма работы приборов, который обеспечивается компьютерным центром. Таймер в определенное время подает сигнал на дозатор подачи корма. Из бункера гранулы попадают в садок с рыбой. По мере увеличения концентрации рыбы в зоне кормления увеличивается объем подаваемого корма до величин, когда корма достаточно, но он еще весь осваивается рыбой и не падает на дно. Определение концентраций рыб и отсутствие значительного падения корма на дно обеспечивают подводные эхолоты и фотореле. Подача корма осуществляется до тех пор, пока рыба проявляет интерес к корму и плотность скопления в зоне кормления выше фоновых значений. Фоновое значение равно плотности рыб в зоне подачи корма в промежутках между кормлениями. Видеокамеры необходимы только для выборочного контроля работы системы человеком.
- Ожидаемый эффект от реализации инновационной идеи
В качестве примера используем показатели для садкового выращивания семги (атлантического лосося).
Суточный рацион кормов для товарной семги составляет 2–3 % от массы тела рыбы при температуре воды 1–2º С и 3–7 % от массы тела при 8–10ºС. Возьмем осредненный показатель 4 % [5].
В случае недокорма рыбы в результате недостаточного внесения корма значение, близкое к минимальной потере прироста рыбы, равно 0,01 % от массы рыбы при отлове.
Согласно эмпирическим данным, полученным в хозяйствах с автоматическим кормлением рыб, потери корма составляют более 0,1 % от общей массы вносимого корма.
В России продукция товарной аквакультуры лососевых в настоящее время составляет менее 50 тыс. т в год, в то время как в таких странах, как Норвегия, Чили, ЕС, Япония, около 1 млн т и более. Имея самую большую акваторию в мире, пригодную для выращивания товарного лосося, Россия способна выращивать его до 10 млн т в год. В своем примере возьмем показатель в 1 млн т в год.
Потребность в корме в случае выращивания 1 млн т семги будет составлять 40 тыс. т в сутки. Потери корма составят 40 т в сутки, или 14600 тонн в год. Стоимость кормов для товарного выращивания семги составляет 2000 долларов за тонну [6]. Таким образом, общие потери корма в год составят 29,2 млн долл. в год.
В случае недокорма потери в живом весе будут составлять порядка 100 т в сутки при выращивании 1 млн т товарной продукции. В год это будет составлять 36500 тонн. Оптовая стоимость семги на рынках Норвегии и ЕС составляет порядка 6,5 долл. за 1 кг, а в России минимальная цена зафиксирована в 3,5 долл. за кг [7]. Значит, в год стоимость недополученной продукции будет от 127,75 млн до 237,25 млн долл. в год.
Для оценки общих потерь в части прибыли возьмем среднюю величину от недокорма и потери кормов: (127,75 млн + 29,2 млн) / 2 = 78,475 млн долл в год.
Таким образом, экономический эффект от реализации предлагаемой инновационной идеи составит более 50 млн долл. в год при выращивании 1 млн тонн товарной продукции.
Очевидно, что финансовая отдача будет более высокая, если учесть, что нами взяты минимальные значения от существующих. Кроме того, использование соответствующих технических средств возможно и для молоди семги, а также при кормлении других видов гидробионтов, выращиваемых в хозяйствах аквакультуры.
Кроме того, при обслуживании такого садкового хозяйства исключается тяжелый, напряженный низкоквалифицированный труд большого числа людей. Требуются лишь несколько высококвалифицированных специалистов. Это особенно актуально в условиях удаленности хозяйств от крупных густонаселенных городов, например, на Дальнем Востоке России.
Заключение
Анализ существующих в мире систем кормления рыб в морских садках аквакультуры позволил выявить проблемы неэффективного использования кормов. Это связано с тем, что системы кормления не учитывают некоторые поведенческие реакции, биологию рыб и технические возможности.
Применение теоретических методов позволяет предложить инновационную схему автоматизации кормления рыб в хозяйствах аквакультуры. Ожидаемый эффект от разработки и внедрения такой системы выражается в существенной финансовой отдаче и замещении тяжелого физического труда на высококвалифицированным.
Литература:
- https://countrymeters.info/ru/World
- Белковский Н. М. Аквакультура Китая и России // Рыбоводство. 2017. Т. 1, № 4, С. 58–60
- Гарина Д. В., Кузьмина В. В., Смирнов А. К., Меньшакова П. В. Роль серотонина и холецистокинина в регуляции термоизбирательного и пищевого поведения у рыб // Труды Института биологии внутренних вод РАН. 2015. № 72 (75). С. 66–79
- Чучукало В. И. Питание и пищевые отношения нектона и нектобентоса в дальневосточных морях. Владивосток: ТИНРО-Центр, 2006. 484 с.
- Козлов В. И. Справочник фермера-рыбовода Москва: Издательство ВНИРО, 1998. 342 с.
- Российская газета (Бизнес-газета) // 22.07.2014. № 28 (957) корма
- https://www.fishprice.ru/news/tag/2/6013-mirovye-ceny-na-rybu

