В статье рассмотрен вопрос роботизации животноводческих предприятий, предложена конструктивно-технологическая схема раздатчика-измельчителя кормов рулонной заготовки с возможностью ее роботизации.
Ключевые слова: сено, рулон, конструктивно-технологическая схема, раздатчик-измельчитель, роботизация.
Импортная сельскохозяйственная техника, широко рекламируемая дилерскими фирмами, требует больших финансовых затрат от руководителей хозяйств АПК [1]. Вопрос о целесообразности и сроках разработки технических средств новых типов для механизации можно решить с помощью анализа суммарных затрат на их разработку, производство и эксплуатацию при разном порядке разработки [2]. Тяговое сопротивление машин определяет эффективность машинно-тракторного агрегата, его производительность и эксплуатационные затраты [3]. Эти показатели у новой машины должны быть лучше, чем у заменяемой [3].
Роботизация сельского хозяйства неизбежна. Преимущества роботов в том, что они могут буквально весь день выполнять без перерыва на обед свою работу: управлять трактором, комбайном, искать вредителей, уничтожать сорняки, сажать культуры и другие. Компании John Deer и Claas уже представлены в сегменте автоматической сельхозтехники. Роботизация животноводства развивается не совсем быстрыми темпами, как того требует развитие АПК. Роботизированная доильная система LelyAstronaut позволяет контролировать многие факторы индивидуально для каждой коровы. Успешное роботизированное доение — новый стиль управления фермой. Благодаря регулярной работе автоматического подравнивателя кормов Lely Juno коровам постоянно доступны свежие корма. А быстрая уборка навоза в коровнике роботом Lely Discovery создаст оптимальную и комфортную среду в коровнике. Автоматическая система кормления Lely Vector увеличивает производительность труда на 10–15 %. Хочется отметить, что представленные машины еще требуют присутствие человека для контроля и управления.
Сдерживающий фактор полномасштабной роботизации — это цена. Чтобы фермеры покупали такую технику, она должна стоить меньше, чем человеческий труд.
Целью разработки в области роботизации животноводческих предприятий является повышение производства продукции животноводства за счет рационализации и снижения энергоемкости процесса приготовления и раздачи кормов путем разработки и создания робота-раздатчика прессованных кормов.
Для достижения поставленной цели в рамках разработки решаются следующие основные задачи:
- Анализ состояния средств механизации для раздачи прессованных кормов.
- Анализ роботизации в сельском хозяйстве в области растениеводства и животноводства.
- Разработка конструктивно-технологической схемы робота-раздатчика.
- Аналитические исследования технологического процесса подготовки кормов к скармливанию роботом-раздатчиком.
- Разработка программы в системе LegoMindstormsEvolution 3 под базированием от LabView.
- Изготовление макетного образца робота-раздатчика на базе LegoMindstormsEvolution 3.
- Изготовление экспериментального образца робота-раздатчика.
- Экспериментальные исследования и оптимизация конструктивно-режимных параметров робота-раздатчика: производительность; энергоемкость процесса; металлоемкость; частота вращения рабочих органов; диаметр рабочих органов; количество измельчающих сегментов; угол наклона измельчающих сегментов.

Робот-раздатчик работает следующим образом. Машина из исходной точки (пункт зарядки батареи) по заданной траектории, управляемый программой, движется к загрузке кормов (Рисунок 1). Прибыв к месту назначения, система захвата с дисками 1 и фиксирующими иглами 7 раздвигается в стороны и захватывает кормовой материал 3. Далее работ-раздатчик движется к месту раздачи корма, где в работу включается привод валов 2, которые начинают вращаться вместе с измельчающими рабочими элементами 5 на дисках 1.
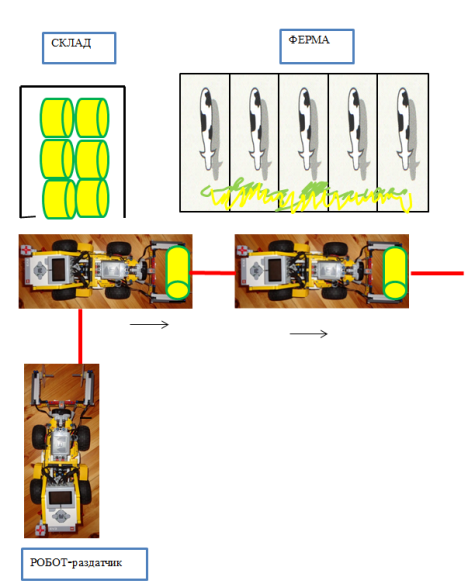
Рис. 1. Роботизированная система кормления
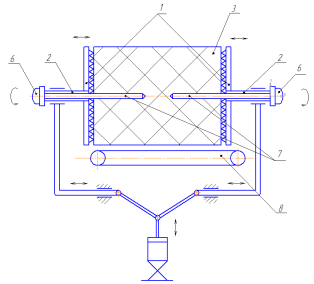
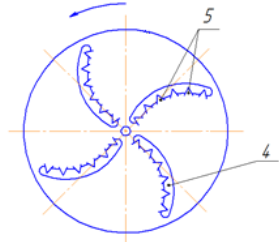
Рис. 2. Рабочие органы раздатчика-измельчителя
По мере уменьшения кормового материала идет перемещение дисков 1 с измельчающими рабочими элементами 5 в осевом направлении к центру. Зубчатые измельчающие рабочие элементы 5 при вращении снимают слой кормового материала, перемещают его в ромбовидные отверстия 4 и выбрасывают под действием силы тяжести на выгрузной транспортер 8, посредством которого грубый корм подается в кормушки животных. По окончании раздачи корма робот-раздатчик возвращается на исходную точку.
1. Работа программы (Рисунок 3).
Робот-раздатчик подъезжает к складу, где хранятся прессованные корма, затем с помощью инфразвукового датчика обнаруживает тюк на расстояние захвата и захватывают его с помощью навесных измельчающих рабочих органов. После чего приезжает на ферму, и, двигаясь по определенной траектории вступают в работу измельчающие рабочие органы идет процесс транспортировки, приготовления и раздачи прессованных кормов.
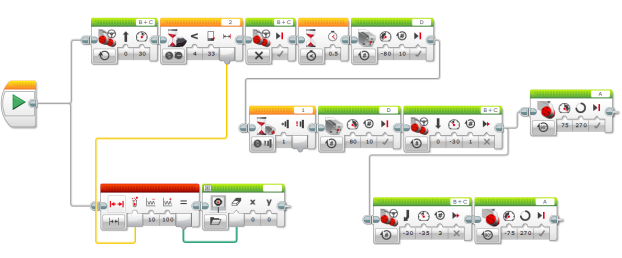
Рис. 3. Программа в системе LegoMindstormsEvolution 3 под базированием от LabView
2. Работа программы (Рисунок 4).
Робот-раздатчик выполняет команды, заданные логическим алгоритмом сравнений. Оператор сидит за пультом управления и управляет работой робота-раздатчика пультом дистанционного управления согласно программе.
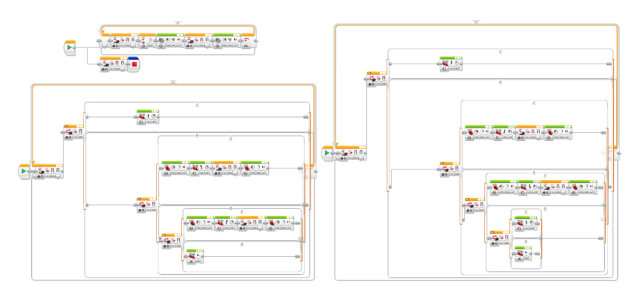
Рис. 4. Программа в системе LegoMindstormsEvolution 3 под базированием от LabView (управление с помощью пульта)
Литература:
- Юдина Е. М., Брусенцов А. С. К выбору рабочих органов почвообрабатывающего агрегата // В сборнике: Влияние науки на инновационное развитие. Сборник статей Международной научно-практической конференции. 2016. С. 101–104.
- Курасов В. С., Плешаков В. Н., Брусенцов А. С. К определению оптимальных сроков замены технических средств механизации полевого эксперимента в селекции кукурузы // Труды Кубанского Государственного аграрного университета. Краснодар, 2010. № 27. С. 154–157
- Трубилин Е. И., Дробот В. А., Брусенцов А. С. Горизонтальный дисковый рабочий орган// журнал Сельский механизатор. 2014.№ 11 С. 22–23.

