Представлены принципы построения системы моделирования прецизионных электроприводов как адаптивной системы.
Ключевые слова: прецизионные системы, системы моделирования динамических объектов.
Прецизионные системы, в частности прецизионные электроприводы являются специфическим объектом моделирования. Характерным для них является наличие элементов различной физической природы (электрической, механической и электромеханической), малая погрешность отдельных элементов (например, датчики углового положения могут иметь разрядность 215, что соответствует погрешность 0,67 угл. мин.), постоянные времени различных элементов могут существенно различаться, могут присутствовать импульсные элементы с малой длиной импульса, а также элементы с временными задержками [1, с. 12]. Всё это существенно усложняет моделирование прецизионных систем, так как существующие методы численного интегрирования в сочетании с моделями элементов обеспечивают погрешность порядка 10…20 %, что вполне приемлемо для общей оценки работоспособности прецизионных электроприводов, но не позволяет исследовать его работу на уровне погрешностей элементов. Можно ввести понятие масштаба моделирования, который характеризует степень детализации процессов в модели и возможность воспроизведения их на фоне самых крупных в данном объекте процессов.
Можно выделить следующие типовые режимы работы прецизионных систем, которые требуют специальных условий моделирования.
Режим пуска (включения). При этом электрические начальные условия, как правило, нулевые. Цель моделирования — определение работоспособности прецизионной системы или его пусковых характеристик. Требования по точности моделирования невысокие. Изменения всех электрических переменных значительные. Изменения механических переменных может быть как значительным (пуск на заданную скорость), так и незначительным (пуск в режиме стояния).
Режим изменения скорости или угла поворота. При этом электрические начальные условия ненулевые. Механические начальные условия (угол поворота, скорость) могут быть как нулевыми, так и ненулевыми. Цели моделирования могут быть различными: исследование изменений токов в обмотках двигателя; исследование отклонений угла поворота или скорости, исследование отдельных сигналов в соответствующих элементах системы управления и др. В этом случае возможны как невысокие, так и высокие требования к воспроизведению деталей процессов, т. е. требуется различный масштаб моделирования.
Режим работы установившийся. При этом целью исследований могут быть: повторяющиеся процессы в инверторе (переключения транзисторов и соответствующие сигналы в системе управления), активные потери мощности, форма токов в обмотках, колебания скорости, момента, угла поворота (при удержании двигателя в заданном положении) и т. п. Очевидно, что в некоторых случаях требуются сравнительно обобщённые модели процессов (например, для анализа потерь), а в других — наиболее детализированные (при исследовании сигналов в системе управления). Именно в этом режиме обеспечивается заданная точность прецизионной системы.
Режим работы аварийный. В данном случае, как правило, исследуют переходные процессы обобщённо, т. е. допустима невысокая точность расчётов. Но иногда требуется проанализировать работу системы управления в аварийном режиме и тогда необходимо добиваться повышенной точности расчётов и учёта многочисленных деталей.
Для исследования аварийных режимов, связанных, на примере индукторного двигателя двойного питания, с отключением фаз обмоток, необходимо разработать соответствующие математические модели. Произвольное подключение и отключение фаз приводит к преобразованию структуры схемы замещения с изменением замкнутых контуров протекания токов, числа переменных состояния и выходных переменных. Т. е. индукторный двигатель двойного питания в этих режимах описывается моделью с переменной структурой в виде набора взаимосвязанных структур. Эти структуры последовательно сменяют друг друга при отключении или подключении фаз. При этом должно выполняться условие их взаимосвязи через переменные состояния. Так как модель представляет собой систему дифференциальных уравнений, то при их интегрировании для переменных состояния на каждом этапе интегрирования задаются начальные условия.
Методика получения универсальной математической модели двигателя для режимов работы с различным числом подключённых фаз заключается в следующем. Разрабатываются базовая и частные математические модели, которые работают во взаимосвязи (Рис. 1).
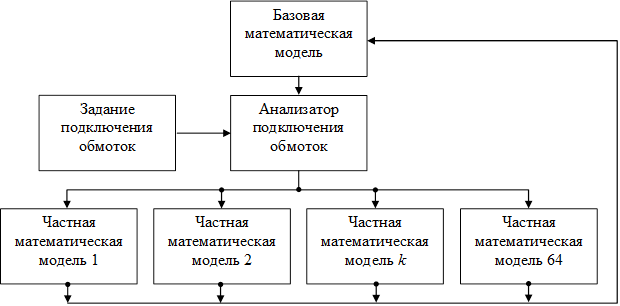
Рис. 1. Структурная схема модели индукторного двигателя с переменной структурой
Частные математические модели полностью отражают специфику подключения фаз и наличие тех или иных контуров. В них рассчитываются для всех фаз (подключённых и отключённых) активные проводимости, токи и их производные, потокосцепления и их производные, а также потенциалы на клеммах отключённых фаз. Эти результаты передаются в базовую модель. Базовая математическая модель сама по себе не отражает специфики подключения фаз в данный момент. Она записана в самом общем виде и с её помощью рассчитываются производные вектора переменных состояния (потокосцеплений) для всех фаз (в том числе отключённых) [2, с. 59]. Задача базовой модели — устанавливать связь между частными моделями, которые отличаются составом переменных состояния. Программа численного интегрирования работает с обобщённым вектором переменных состояния из базовой модели и «не замечает» различий в модели двигателя при смене её структуры, так число переменных состояния не изменяется.
Из анализа режимов можно сделать вывод, что в разных режимах для одних и тех же блоков требуются разные точности моделирования.
Отдельная проблема возникает при моделировании смены режимов и необходимости просмотра различных процессов, в зависимости от режима и, возможно, даже в рамках одного режима. Например, желательно посмотреть форму тока в обмотках и тут же — сигналы в системе управления [3, с 49]. Одновременно просматривать эти переменные невозможно, так как слишком разный масштаб времени (частоты порядка десятков герц для токов и порядка мегагерц для импульсов в системе управления). Кроме того, параметры сигналов в системе управления могут слабо влиять на форму тока и поэтому, вообще говоря, их можно моделировать раздельно. То же самое происходит при использовании импульсной (цифровой) системе управления, когда один импульс, пришедший в определённый момент времени, меняет процессы в некотором направлении и далее они протекают уже без учёта детальных параметров импульсов в системе управления. Но сам момент прихода такого импульса должен быть зафиксирован точно.
Таким образом, в целом выявляется необходимость построения системы моделирования, способной оперативно менять программные модели отдельных элементов в процессе моделирования.
Кроме моделей, в системе моделирования используются также конкретные численные методы, которые приспособлены к моделям с определёнными характеристиками [4, с 27]. Поэтому изменение модели логично сопроводить изменением используемого метода. В настоящее время большинство моделирующих программ позволяет выбрать методы из достаточного числа возможных вариантов, но только перед началом счёта.
При смене моделей может оказаться необходимым переформировать модель всей системы, так как, например, вместо некоторых динамических моделей (в форме дифференциальных уравнений) могут появиться статические (в форме алгебраических или даже логических выражений). Могут трансформироваться и некоторые модели, записанные в алгоритмической форме. Это потребует увязки нового состава переменных состояния с прежним (входные и выходные переменные часто остаются прежними). Таким образом, адаптивность к выбору моделей элементов предполагает также определённую степень адаптивности к смене модели всей системы.
Процесс смены моделей элементов, методов и модели всей системы не может происходить без соответствующего научного обоснования. Необходимо обеспечить при такой смене преемственность, когда конечные значения переменных прежних моделей становятся начальными для новых моделей. Необходимо обеспечить корректную передачу информации в части внутренних переменных моделей (некоторые из них могут исчезать при упрощении модели и появляться при её усложнении). Необходимо гарантировать сходимость процесса при смене моделей.
В целом ставится задача автоматизировать выбор всех составляющих процесса моделирования с учётом заданного режима и исследуемых переменных. При этом возможны рациональные и оптимальные алгоритмы. Рациональные алгоритмы обеспечивают работоспособность модельного процесса, а оптимальные — его эффективность. В качестве критериев эффективности можно использовать, например, время счёта или общую погрешность.
Литература:
1. Бродовский В. Н., Иванов Е. С. Исполнительные устройства с многофазными электродвигателями переменного тока // Устройства и элементы систем автоматического регулирования и управления. Техническая кибернетика. Книга 3. Исполнительные устройства и сервомеханизмы. М.: Машиностроение, 1976.
2. Бронов С. А., Овсянников В. И., Соустин Б. П. Регулируемые электроприводы переменного тока. Красноярск: КГТУ, 1998.
3. Бронов С. А. Способы управления двигателем двойного питания // Информатика и системы управления. Вып. 5. Красноярск: НИИ ИПУ, 2000.
4. Бронов С. А. Электропривод для приборов с индукторным двигателем двойного питания в квазишаговом режиме // Изв. вузов. Приборостроение. 2004, № 4.

