В задачах радиолокационной оптимизации часто возникает вопрос о выборе между фильтром с конечной импульсной характеристикой и фильтром Кальмана. Оба этих фильтра имеют свои сильные и слабые стороны. В этой работе рассматривается попытка создание их гибридного фильтра, способного автоматически дать оптимальную оценку позиции объекта, основываясь на двух вышеуказанных.
Ключевые слова: фильтр, Кальман, импульс, гибрид.
- Введение и Обозначения










Допустим имеем некоторый движущийся объект в


где







Допустим что некоторое устройство измеряет данный объект с заданной моделью:
где






- Фильтр Кальмана
Рассмотрим оценку вектора состояния на основе измерений

где

Теорема 1
(см [1] или [2]) Если взять матрицу


Где


тогда



Хоть фильтр Кальмана и является оптимальной оценкой для этой модели, но общая модель движения объекта задается в виде

где вектор



- Несмещеный фильтр с конечной импульсной характеристикой
Рассмотрим несмещеный фильтр с конечной импульсной характеристикой определенный в работе [6]

где


Матрица



Таким образом заключение следующее — при
- Гибридизация фильтра Кальмана и несмещеного фильтра с конечной импульсной характеристикой
Данный вопрос о выборе между оценками (3) и (5) приводит нас к созданию их гибрида, который будем искать в виде

где


Обозначим вероятность P(






Подставив (4.1) в полученное выражение имеем

Данная задача минимизации эквивалентна задаче

Легко заметить, что при

Таким образом, чтобы вычислить гибридную оценку надо сперва оценить







Таким образом, чтобы найти



- Анализ эффективности и заключение
Ниже приведены наблюдения ошибок



Для фильтра Кальмана оценки матриц были вычислены как

А для НФКИХ
Было рассмотрено 2 возможных случая — на Рис.1. была рассмотрена модель без маневров (т. е.


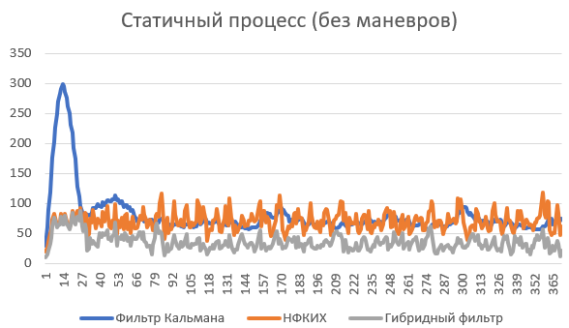
Рис. 1
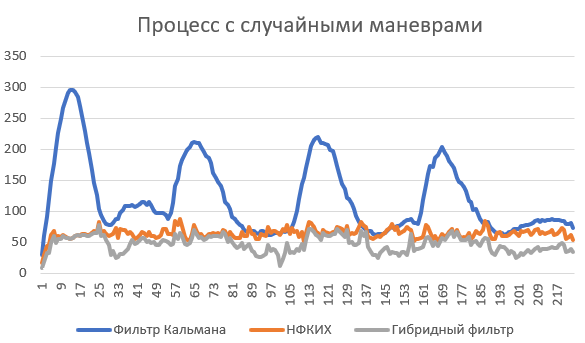
Рис. 2
Как можем видеть при практическом наблюдении гибридный фильтр проявляет себя лучше чем оба других фильтра во всех случаях. Значимость данной работы заключается в том что решаются сразу два вопроса — точность оценок


Литература:
- Kalman, R.E. (1960). «A new approach to linear filtering and prediction problems». Journal of Basic Engineering. 82 (1): 35–45. doi:10.1115/1.3662552. Archived from the original (PDF) on 2008–05–29. Retrieved 2008–05–03.
- Kalman, R.E.; Bucy, R.S. (1961). «New Results in Linear Filtering and Prediction Theory»
- Hakobyan Y. R. Basics of Numerical Analysis (2005)
- Ramachandra K. V. (2000) «Kalman Filtering Techniques for Radar Tracking» 1st Edition
- Дарбинян А. А., Акопян А. Р. (2019) “Модификация фильтра Калмана для полярных и сферических систем координат” Вестник РАУ
- Unbiased FIR Filtering: An Iterative Alternative to Kalman Filtering Ignoring Noise and Initial Conditions. October 2017IEEE Control Systems Magazine 37(5) DOI: 10.1109/MCS.2017.2718830

