При измерении позиции объекта радаром возникает вопрос о точности измерения. Чтобы минимизировать ошибку измерения используется Фильтр Калмана. Для этого необходимо чтобы измерение было бы выполнено в Декартовых системах координат, но большинство радаров измеряют позицию в полярных или сферических системах координат, и возникает вопрос о линеаризации модели измерения. Ранее для этого была использована формула Тейлора. В этой же статье будет рассмотрен метод минимизации ошибки линеаризации.
Ключевые слова: фильтр, Калман, полярные, сферические, модификация.
1. Обозначения










Допустим имеем некоторый движущийся объект в

где







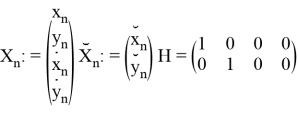
Допустим что некоторое устройство измеряет данный объект с заданной моделью:
где







Где

Теорема 1
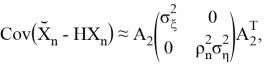
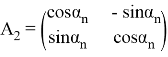
(см [1] или [2]) Если взять матрицу


Где


Тогда

Как можно заметить ковариационная матрица






Также модел измерения в виде






Также Обозначим
Как можно заметить — модель движения объекта является моделью линейно движущегося объекта со случайным ускорением, но измерение выполняется в полярных систем координат. Проблема заключается в линеаризации

2. Приближение в полярных системах координат
Рассмотрим множество функций
Данное пространство является векторным [6]. Также определим скалярное произведение.

Найдем линейные оценку для


Так чтобы


Рассмотрим пространство







Так как



Решив уравнение, имеем

Векторы


Следовательно система векторов



Можем заметить что уравнения (8) и (6) одинаковы, следовательно

Повторив тот же процесс для y имеем

Таким образом мы доказали теорему.
Теорема 2
Оценки

Будут иметь наименьшие значения для


Представив в матричном виде
нетрудно заметить, что оценка (1.4) является частным случаем формулы (2.6) когда значение

3. Практическое наблюдение при полярных координатах
Ковариационные матрицы (1.4) и (2.6) были использованы при алгоритме фильтрации Kальмана на симуляции при различных значениях

Далее можете видеть результат данной компьютерной симуляции, где




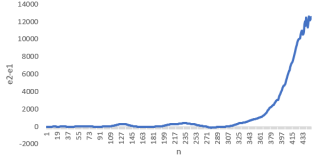


Как видно из полученных результатов, новая ковариационная матрица в большинстве случаев лучше прежней.
Литература:
- Kalman, R.E. (1960). «A new approach to linear filtering and prediction problems». Journal of Basic Engineering. 82 (1): 35–45. doi:10.1115/1.3662552. Archived from the original (PDF) on 2008–05–29. Retrieved 2008–05–03.
- Kalman, R.E.; Bucy, R.S. (1961). «New Results in Linear Filtering and Prediction Theory»
- Hakobyan Y. R. Basics of Numerical Analysis (2005)
- Ramachandra K. V. (2000) «Kalman Filtering Techniques for Radar Tracking» 1st Edition
- Дарбинян А. А., Акопян А. Р. (2019) “Модификация фильтра Калмана для полярных и сферических систем координат” Вестник РАУ

