




Навигационные системы для систем автоматического управления автомобилем
Авторы: Иванов Александр Васильевич, Сурков Владимир Олегович, Комраков Дмитрий Вячеславович, Негуляева Анастасия Петровна
Рубрика: 7. Технические науки
Опубликовано в
IV международная научная конференция «Исследования молодых ученых» (Казань, ноябрь 2019)
Дата публикации: 28.10.2019
Статья просмотрена: 554 раза
Библиографическое описание:
Иванов, А. В. Навигационные системы для систем автоматического управления автомобилем / А. В. Иванов, В. О. Сурков, Д. В. Комраков, А. П. Негуляева. — Текст : непосредственный // Исследования молодых ученых : материалы IV Междунар. науч. конф. (г. Казань, ноябрь 2019 г.). — Казань : Молодой ученый, 2019. — С. 14-19. — URL: https://moluch.ru/conf/stud/archive/350/15380/ (дата обращения: 26.04.2024).
Современное развитие автомобильных электронных систем, таких как автоматическая парковка, адаптивный круиз-контроль, удержание автомобиля относительно полосы движения, контроль слепых зон, экстренное автоматическое торможение и др. привело к тому, что это позволило автопроизводителям создать систему автоматического управления (САУ) автомобилем. В данный момент практически все большие автоконцерны, такие как General Motors, Ford, Mersedes Benz, Volkswagen, Audi, BMW, Volvo, Сaddilac и другие занимаются разработкой систем автоматического управления автомобилем [1]. Это связано с тем, что автоматические транспортные средства обладают следующими достоинствами:
− возможность перевозки грузов в опасных зонах, во время природных и техногенных катастроф или военных действий;
− снижение затрат на транспортировку грузов и пассажиров;
− снижение затрат на топливо и более эффективное использование пропускной способности дорог за счет централизованного управления транспортным потоком;
− экономия временных ресурсов;
− расширение возможностей использования автомобиля для людей с ограниченными возможностями;
− минимизация ДТП и числа человеческих жертв в них.
Наибольшего успеха среди всех разработчиков, добилась корпорация Google, разработки которой реализованы на 6 опытнейших автомобилях Lexus RX 450h, Ауди TT и Toyota Prius.
Для обеспечения управления автомобилем без участия человека используются системы управления автомобилем, состав которых, например, для автомобилей корпорации Google следующий:
− аппаратура приема (АП) сигналов спутниковых радионавигационных систем (СРНС);
− инерциальная навигационная система (ИНС);
− датчик LIDAR (служит для формирования двумерной или трехмерной модели окружающего пространства);
− набор видеокамер;
− радары;
− датчик оценки положения;
− бортовой компьютер.
В настоящее время получила распространение следующая структурная схема САУ автомобиля (рисунок 1).
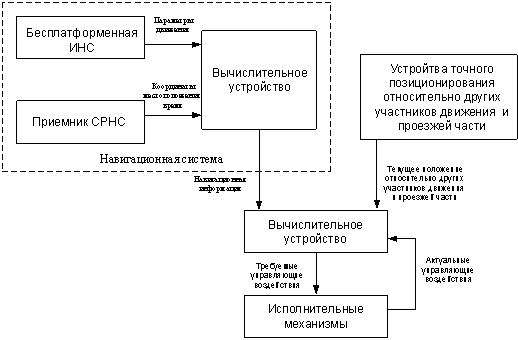
Рис. 1. Структурная схема САУ автомобиля
Состав функционально делится на две части. В первую часть включаются инерциальная навигационная система и аппаратура приема сигналов спутниковых радионавигационных систем, которые обеспечивают бортовой компьютер основной информацией о положении автомобиля на цифровой карте местности, и все вместе образуют навигационную систему. Недостатком работы инерциальной навигационной системы является постепенное с течением времени увеличение погрешности определения координат местоположения, значение которой может достигнуть неприемлемой величины. Поэтому для коррекции координат местоположения (списания накопившейся погрешности) используется спутниковая радионавигационная система. Во вторую часть входят датчики, устройства и системы, с помощью которых производится точное позиционирование относительно проезжей части и других участников дорожного движения.
Анализ систем управления беспилотных автомобилей выявил большое число проблем, возникающих перед конструкторами в процессе их разработки. Так, например, на данный момент беспилотные автомобили обладают следующими недостатками:
− беспилотные автомобили не могут передвигаться под проливным дождем и в условиях заснеженной местности. Связано это с тем, что идентификация местности производится посредством сравнения заблаговременно отснятых фотографий с результатами визуализации окружающего ландшафта сканируемого системами автомобиля. Благодаря такому подходу система может отличить пешехода от обычного телеграфного столба, но при плохих погодных условиях система сделать это бессильна;
− автомобили не в состоянии распознавать временные сигналы светофора. Они не могут отличать пешеходов от полицейских или скомканную бумагу от камня.
Таким образом, движение автомобиля в плохую погоду (сильный дождь, туман, снегопад и пр.), а также загрязнение или отказ датчиков приводит к тому, что основными системами, которые служит для определения координат и параметров движения автомобиля остаются инерциальная навигационная система и спутниковая радионавигационная система. Особенностью работы спутниковой радионавигационной системы является то, что ее радиосигналы в некоторые моменты времени могут содержать ошибки, обусловленные слабой помехозащищенностью канала передачи информации. Они могут быть вызваны целым рядом факторов — от местонахождения до неблагоприятных погодных условий. Природа этих ошибок различна: неточное определение времени; ошибки вычисления орбит; многопутность распространения сигнала; ионосферные задержки сигнала; тропосферные задержки сигнала; геометрическое расположение спутников, а также пассивные и активные помехи. Это приводит к тому, что выходные сигналы аппаратуры приема являются неточными (искаженными). Для выявления неточных данных необходимо осуществлять идентификацию измерений спутниковой радионавигационной системы — иметь автономную систему контроля целостности навигационных данных спутниковой радионавигационной системы.
Цель работы предъявить требования к навигационной системе по точности определения координат местоположения автомобиля и обосновать подходы к построению автономных систем контроля целостности сигналов СРНС.
Требования кточности определения координат местоположения. Для определения требований к навигационной системе по точности определения координат местоположения автомобиля были проведены вычисления. На рисунке 2 представлены требования к навигационной системе по точности определения координат местоположения в виде зависимости среднеквадратического значений ошибки ![]() определения координаты по оси Х, от ширины транспортного средства L для ширины полосы движения D=3 м (кривая 1), D=3,5 м (кривая 2), D=3,75 м (кривая 3), D=4,5 м (кривая 4). Ширина транспортного средства L бралась в пределах от 1,5 м до 2,55 м. Требования к среднеквадратическому значению ошибки
определения координаты по оси Х, от ширины транспортного средства L для ширины полосы движения D=3 м (кривая 1), D=3,5 м (кривая 2), D=3,75 м (кривая 3), D=4,5 м (кривая 4). Ширина транспортного средства L бралась в пределах от 1,5 м до 2,55 м. Требования к среднеквадратическому значению ошибки ![]() по Y носят аналогичный характер.
по Y носят аналогичный характер.
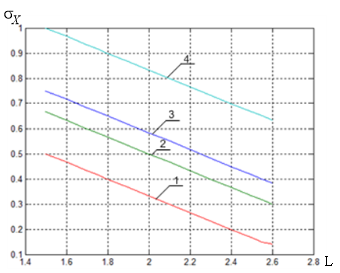
Рис. 2. Требования к точности определения координат местоположения навигационных систем по оси Х
Из анализа графиков, представленных на рисунке 2, следует, что требуемая точность определения координат для НС САУ легковых автомобилей, ширина которых 1,5 м, составляет от ![]() =0,25 м до
=0,25 м до ![]() =0,5 м в зависимости от ширины дороги. Для грузовых автомобилей и автобусов, ширина которых равна 2,5 м, точность определения составляет от
=0,5 м в зависимости от ширины дороги. Для грузовых автомобилей и автобусов, ширина которых равна 2,5 м, точность определения составляет от ![]() =0,09 м до
=0,09 м до ![]() =0,33 м в зависимости от ширины дороги.
=0,33 м в зависимости от ширины дороги.
В настоящее время лучшие отечественные (системы серии КомпаНав) и зарубежные НС (Ellipse-N и др.) имеют точность определения координат в 1,5 м. Эта точность в 17 раз хуже, чем максимально требуемая точность определения координат ![]() =0,09 м при D = 3 м для грузовых автомобилей с шириной L = 2,5 м.
=0,09 м при D = 3 м для грузовых автомобилей с шириной L = 2,5 м.
Использование в некоторых системах режима дифференциальной коррекции СРНС позволяет получить точность определения координат ![]() =0,4 м [38, 39] и частично удовлетворить требованиям к точности определения координат местоположения НС для легковых автомобилей, но не для грузовых автомобилей. При этом усложняется аппаратура САУ из-за введения канала приема дифференциальных поправок.
=0,4 м [38, 39] и частично удовлетворить требованиям к точности определения координат местоположения НС для легковых автомобилей, но не для грузовых автомобилей. При этом усложняется аппаратура САУ из-за введения канала приема дифференциальных поправок.
Подходы кпостроению автономных систем контроля целостности. Для обеспечения целостности навигационного обеспечения идеология построения НС должна предполагать создание алгоритмов оптимальной комплексной первичной обработки радионавигационных сигналов СРНС, которые позволяли бы одновременно решать задачи обнаружения радиосигналов на входе АП, идентификации и адаптивного оценивания параметров этих сигналов.
Обнаружение радиосигналов позволяет оценить радионавигационное поле сигналов на входе АП и обеспечить целостность навигационного обеспечения путем выявления факта пропадания радиосигнала на входе АП и исключения его из обработки путем смены рабочего созвездия. Это позволяет производить адаптацию к внешним условиям путем реконфигурации структуры информационной системы НС. Решение задачи идентификации позволяет идентифицировать параметр
Применение СРНС в НС для решения задач навигации вносит специфику в решение описанной выше задачи. Эта специфика заключается в том, что с помощью радиосигналов этих систем дополнительно производится передача двоичных данных (поправка временной шкалы данного навигационного искусственного спутника земли, его параметры орбиты, системное время и другая служебная информация), обеспечивающих решение задач навигации. Рассматриваемую задачу можно сформулировать следующим образом. В течение фиксированного отрезка времени [0,T] наблюдается реализация векторного случайного процесса ![]()
![]() . Наблюдаемый процесс — вектор наблюдения
. Наблюдаемый процесс — вектор наблюдения ![]() представляет собой в общем случае смесь полезного радиосигнала
представляет собой в общем случае смесь полезного радиосигнала ![]() и шума
и шума ![]()
![]() . Компоненты вектора наблюдения имеют вид
. Компоненты вектора наблюдения имеют вид
![]()
![]()
где ![]()
![]() — подлежащий оцениванию вектор непрерывных параметров радиосигналов;
— подлежащий оцениванию вектор непрерывных параметров радиосигналов; ![]() – дискретный информационный параметр, принимающий одно из значений
– дискретный информационный параметр, принимающий одно из значений ![]() ,
, ![]() , и используемый в спутниковых радионавигационных системах типа ГЛОНАСС или GPS для передачи служебной информации;
, и используемый в спутниковых радионавигационных системах типа ГЛОНАСС или GPS для передачи служебной информации; ![]() — параметр обнаружения радиосигнала, представляющий собой случайную величину, которая может принимать одно из альтернативных значений
— параметр обнаружения радиосигнала, представляющий собой случайную величину, которая может принимать одно из альтернативных значений ![]() что соответствует наличию сигнала
что соответствует наличию сигнала ![]() в наблюдаемом колебании
в наблюдаемом колебании ![]() или
или ![]() что означает отсутствие сигнала;
что означает отсутствие сигнала; ![]() — параметр идентификации, непрерывного векторного процесса
— параметр идентификации, непрерывного векторного процесса ![]() , принимающий одно из значений
, принимающий одно из значений

![]() .
.
Из дискретных параметров образуем векторные дискретные процессы ![]() и
и ![]() ,
, ![]() . Тогда реализацию векторного случайного процесса
. Тогда реализацию векторного случайного процесса ![]() на интервале
на интервале ![]() можно представить в виде
можно представить в виде
![]()
![]()
![]()
В результате обработки реализации ![]() на интервале времени [0,T] требуется принять одно из
на интервале времени [0,T] требуется принять одно из ![]() решений, что дискретный параметр имеет значение
решений, что дискретный параметр имеет значение ![]() , то есть провести идентификацию параметра математической модели
, то есть провести идентификацию параметра математической модели ![]() , адаптивное оценивание вектора непрерывных параметров
, адаптивное оценивание вектора непрерывных параметров ![]() , а также принять одно из m решений, согласно которому считается,
, а также принять одно из m решений, согласно которому считается, ![]() и одно из b решений, согласно которому считается
и одно из b решений, согласно которому считается ![]() .
.
Данные задачи были решены в работах [2–4], где были получены алгоритмы и структурные схемы навигационных систем для подвижных наземных объектов. При использовании полученных алгоритмов перспективная структурная схема САУ автомобиля будет иметь вид, представленный на рисунке 3.
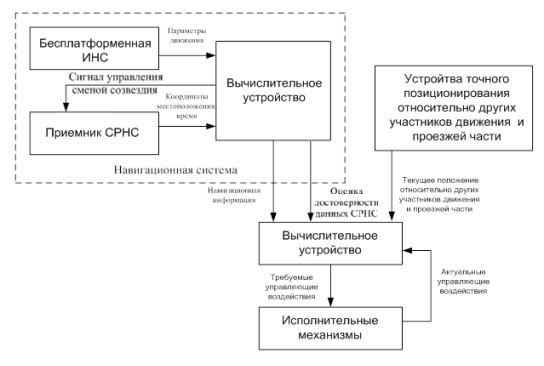
Рис. 3. Перспективная структурная схема САУ автомобиля
В отличие от схемы, приведенной на рисунке 1, в перспективной структурной схеме осуществляется контроль целостности навигационных данных, путем решения задач обнаружения радиосигналов СРНС и исключения их из обработки путем замены рабочего созвездия, а также оценка достоверности навигационных данных, передаваемых СРНС.
Литература:
- Козорез, Д. А. Состав и структура автономных систем навигации и управления роботизированного прототипа автомобиля / Д. А. Козорез, Д. М. Кружков // Спецтехника и связь. — 2012. — № 3.
- Иванов, А. В. Адаптивное оценивание и идентификация сигналов спутниковых радионавигационных систем в навигационных системах / А. В. Иванов, О. В. Сурков, С. П. Москвитин // Вестник Тамбовского государственного технического университета. — 2018. — Т. 24, № 1. — C. 44–57.
- Иванов, А. В. Идентификация и адаптивное оценивание дискретно-непрерывных процессов / А. В. Иванов, О. В. Сурков // Радиотехника — 2018– № 10 — С. 81–91.
- Иванов, А. В. Алгоритмы адаптивного оценивания и идентификации для навигационных систем подвижных наземных объектов на основе спутниковых радионавигационных систем/ А. В. Иванов, О. В. Сурков // Успехи современной радиоэлектроники — 2019– № 5 — С. 25–39.
[1] Исследование выполнено при финансовой поддержке РФФИ в рамках научного проекта № 19–08–00312 А.
Похожие статьи
Облик перспективной навигационной системы для подвижного...
Рассматривается концепция построения навигационной системы для подвижного наземного объекта, предлагается состав системыс описанием
система , факт наличия, навигационная система , координата местоположения, метод обработки информации , угол ориентации...
Системы навигации подвижных наземных объектов и их...
Целью статьи являлся анализ существующих систем навигации для подвижных наземных объектов и сравнение их точностных характеристик.
Наиболее подходящим режимом работы является совместный режим (инерциальная навигационная система + спутниковая...
Сравнение космической и инерциальной навигации на примере...
Космические навигационные системы. Спутниковая система навигации — совокупность технических средств, предназначенных для определения координат местоположения, точного времени и параметров движения.
Системы навигации подвижных наземных объектов и их...
Основной радиотехнической системой, используемой в данных навигационных системах является — спутниковая радионавигационная система. Наиболее подходящим режимом работы является совместный режим (инерциальная навигационная система + спутниковая...
Общие принципы построения навигационных систем...
Так для систем данного типа в качестве измерителей автономной системы могут быть использованы — датчик угловых скоростей (ДУС), датчик линейных ускорений (ДЛУ), инерциальная навигационная система (ИНС), цифровой магнитный компас и т. д. В качестве...
Сравнительный анализ отечественных и зарубежных систем...
В статье дан сравнительный анализ систем навигации подвижных наземных объектов. Системы иностранного производства имеют более высокие характеристики точности за счет использования дифференциального режима работы спутниковых радионавигационных...
Анализ состава существующих систем навигации для подвижных...
Общие сведения о навигационных системах для ПНО. Система навигации ПНО решает задачи
Обобщенную структурную схему навигационной системы ПНО можно представить в виде (рисунок 1).
- инерциальной навигационной системы (ИНС) как платформенной, так и...
Основы спутниковой навигации | Статья в журнале...
Спутниковые системы навигации также позволяют получить скорости и направления
О производстве спутников связи. Производство легкового автомобиля начинается с листа
Космические навигационные системы. Спутниковая система навигации — совокупность...
Анализ существующих современных радионавигационных систем
В состав современных спутниковых радионавигационных систем входят три подсистемы: Подсистема навигационных искусственных спутников Земли (НИСЗ); Подсистема контроля и управления (наземный командно-измерительный комплекс (КИК)...
Похожие статьи
Облик перспективной навигационной системы для подвижного...
Рассматривается концепция построения навигационной системы для подвижного наземного объекта, предлагается состав системыс описанием
система , факт наличия, навигационная система , координата местоположения, метод обработки информации , угол ориентации...
Системы навигации подвижных наземных объектов и их...
Целью статьи являлся анализ существующих систем навигации для подвижных наземных объектов и сравнение их точностных характеристик.
Наиболее подходящим режимом работы является совместный режим (инерциальная навигационная система + спутниковая...
Сравнение космической и инерциальной навигации на примере...
Космические навигационные системы. Спутниковая система навигации — совокупность технических средств, предназначенных для определения координат местоположения, точного времени и параметров движения.
Системы навигации подвижных наземных объектов и их...
Основной радиотехнической системой, используемой в данных навигационных системах является — спутниковая радионавигационная система. Наиболее подходящим режимом работы является совместный режим (инерциальная навигационная система + спутниковая...
Общие принципы построения навигационных систем...
Так для систем данного типа в качестве измерителей автономной системы могут быть использованы — датчик угловых скоростей (ДУС), датчик линейных ускорений (ДЛУ), инерциальная навигационная система (ИНС), цифровой магнитный компас и т. д. В качестве...
Сравнительный анализ отечественных и зарубежных систем...
В статье дан сравнительный анализ систем навигации подвижных наземных объектов. Системы иностранного производства имеют более высокие характеристики точности за счет использования дифференциального режима работы спутниковых радионавигационных...
Анализ состава существующих систем навигации для подвижных...
Общие сведения о навигационных системах для ПНО. Система навигации ПНО решает задачи
Обобщенную структурную схему навигационной системы ПНО можно представить в виде (рисунок 1).
- инерциальной навигационной системы (ИНС) как платформенной, так и...
Основы спутниковой навигации | Статья в журнале...
Спутниковые системы навигации также позволяют получить скорости и направления
О производстве спутников связи. Производство легкового автомобиля начинается с листа
Космические навигационные системы. Спутниковая система навигации — совокупность...
Анализ существующих современных радионавигационных систем
В состав современных спутниковых радионавигационных систем входят три подсистемы: Подсистема навигационных искусственных спутников Земли (НИСЗ); Подсистема контроля и управления (наземный командно-измерительный комплекс (КИК)...




