




В статье дан сравнительный анализ систем навигации подвижных наземных объектов. Системы иностранного производства имеют более высокие характеристики точности за счет использования дифференциального режима работы спутниковых радионавигационных систем и применения в качестве систем дифференциальной коррекции космических и наземных систем.
Система навигации подвижных наземных объектов (ПНО) решает задачи определения координат местоположения, параметров движения и углов ориентации подвижного объекта и выдачу необходимой информации. В статьях [1–2] производится обзор существующих навигационных систем, как военного, так и гражданского применения. В них подробно рассматривается работа некоторых датчиков, методы обработки информации в данных системах и сравниваются значений погрешностей в определения курса. В статье [3] сравниваются точностные характеристики и состав систем военного назначения. В статьях [4] рассматриваются системы навигации подвижных наземных объектов отечественного производства. В статье [5]дается анализ систем навигации отечественного и иностранного производства с указанием оптимального режима работы систем и без сравнения представленных точностных характеристик между собой.
Однако сравнительный анализ всех точностных характеристик навигационных систем для ПНО иностранного и отечественного производства в литературе не встречается. Целью статьи является анализ точностных характеристик существующих систем навигации и их сравнение.
Характеристика навигационных систем для подвижных наземных объектов и их сравнительный анализ
Система навигации ПНО решает задачи определения координат местоположения, параметров движения и углов ориентации подвижного объекта и обеспечивает выдачу следующих данных: горизонтальных координат (координат), высоты, скорости, углов ориентации (крена, курса, тангажа).
Обобщенная структурная схема навигационной системы ПНО представлена на рисунке 1.
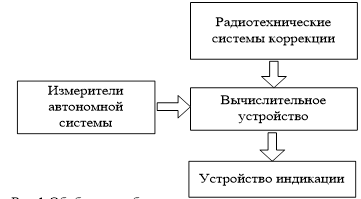
Рис. 1. Обобщенная блок-схема систем навигации для ПНО
Измерители автономной системы предназначены для определения координат, параметров движения и пространственного положения продольных осей ПНО.
В качестве измерителей могут быть использованы следующие устройства: — измеритель ускорения и углов крена и тангажа — инерциальная навигационная система (входит в состав большинства навигационных систем). Инерциальная навигационная система может быть платформенного и бесплатформенного типа.
измеритель магнитного поля Земли: 3-осный магнитометр (система «КомпаНав-2М»,Ekinox-N);
измеритель скорости, выполненный в виде механического («Гамма — 1» [6]) или доплеровского датчика скорости («ГАЛС — Д2М»)
измеритель высоты — барометрический высотомер (система «КомпаНав-3»);
измеритель пройденного пути, который может выполняться в виде одометра (система «БИНС-Тек», «Азимут»,Ellipse-N).
В качестве радиотехнической системы коррекции обычно используется приемник спутниковой навигационной системы (СРНС) (ГЛОНАСС/GPS) и радиотехнические системы дальней навигации «Чайка» и «LORAN-C», входящие в состав системы «ОРИЕНТИР» и КС-100М.
В таблице 1 приведены сравнительные точностные характеристики систем для ПНО отечественного производства.
Таблица 1
Точностные характеристики навигационных систем для подвижных наземных объектов отечественного производства
|
Система |
Режим работы |
Координаты, СКО |
Скорость |
Вертикальная скорость |
Крен, тангаж |
Курс |
|
«Азимут» |
Р2 |
25м |
|
|
0,8° |
|
|
Р1 |
1,2 %от пр. пути |
|
|
0,8° |
|
|
|
КомпаНав-2Т |
Р2 |
5м |
0,2 м/с |
0,3 м/с |
1,0° |
1,5° |
|
Р1 |
500м |
5 м/с |
0,3 м/с |
1,5° |
3° |
|
|
КомпаНав-3 |
Р2 |
6 м |
0,2 м/с |
0,2 м/с |
0,2° |
0,4° |
|
Р1 |
500м |
0,5 м/с |
0,5 м/с |
0,4° |
2° |
|
|
КомпаНав-2М |
Р2 |
5м |
5 м/с |
0,3 м/с |
0,3° |
0,5° |
|
Р1 |
600м |
5 м/с |
0,5 м/с |
0,5° |
3° |
|
|
БИНС-Тек |
Р2 |
5м |
0,1 м/с |
0,3 м/с |
0,03° |
0,1° |
|
Р1 |
0,25 %от пр. пути |
2 м/с |
0,5 м/с |
0,1° |
0,7° |
|
|
Ориентир |
Р2 |
500 м |
|
|
|
|
|
Р1 |
0,2 % от пр. пути |
|
|
|
|
|
|
КС-100М |
Р2 |
60 м |
1 м/с |
|
|
0,8° |
|
Р1 |
500 м |
1 м/с |
|
|
0,8° |
|
|
Малогабаритная навигационная аппаратура ФГУП НКТБ «ФЕРРИТ» |
Р2 |
20 м |
|
|
0,2° |
0,6° |
|
Р1 |
1,0 % от пр. пути |
|
|
0,2° |
0,6° |
|
|
«Трона-1». |
Р2 |
10 м |
|
|
|
|
|
Р1 |
0,7 % от пр. пути |
|
|
|
|
|
|
ТНА-4 |
Р2 |
|
|
|
|
|
|
Р1 |
0,9 % от пр. пути |
|
|
|
|
|
|
«Гамма -1» |
Р2 |
25 м |
|
|
3,5° |
0,1° |
|
Р1 |
0,6 % от пр. пути |
|
|
3,5° |
0,1° |
|
|
«Гамма -2» |
Р2 |
25 |
|
|
3,5° |
0,1° |
|
Р1 |
1 % от пр. пути |
|
|
3,5° |
0,1° |
|
|
ГАЛС-Д2М-1 |
Р2 |
33 м |
|
|
0,5° |
0,16° |
|
Р1 |
0,5 % от пр. пути |
|
|
|
|
|
|
ГАЛС-Д2М-2 |
Р2 |
22 м |
|
|
0,5° |
0,11° |
|
Р1 |
0,25 % от пр. пути |
|
|
|
|
|
|
ГАЛС-Д2М-3 |
Р2 |
14 м |
|
|
0,5° |
0,7° |
|
Р1 |
0,1 % от пр. пути |
|
|
|
|
|
|
ГАЛС-Д2М-4 |
Р2 |
8 м. |
|
|
0,5° |
0,04° |
|
Р1 |
0,05 % от пр. пути |
|
|
|
|
В таблице 1: Р1 — автономный режим; Р2- режим с коррекцией от СРНС; пр. путь — пройденный путь;СКО — среднеквадратическое отклонение.
Основными для навигационных систем отечественного производства являются следующие режимы работы:
1. Автономный;
2. Автономный с коррекцией от СРНС.
В таблице 2 приведены точностные характеристики систем навигации подвижных наземных объектов иностранного производства.
Таблица 2
Точностные характеристики навигационных систем для подвижных наземных объектов иностранного производства
|
Система |
Режим работы |
Координаты, СКО |
Скорость |
Крен, тангаж |
Курс |
|
Ellipse-N |
Р2 |
2м |
0.1 м/с |
0.2° |
0.2 ° |
|
Р1 |
190 |
||||
|
Ellipse-E |
Р2 |
2м |
0.1 м/с |
0.2° |
0.2 ° |
|
Р1 |
190м |
||||
|
Ekinox-N |
Р2 |
1.5 м |
0,1 %от пр. пути |
0.05 ° |
0,5° |
|
Р1 |
|
||||
|
SBAS |
0.6 м |
||||
|
DGPS |
0.4 м |
||||
|
RTK |
0.02 м |
||||
|
RT2500 |
Р2 |
3м |
0,36 м/с |
0.05° |
0.2° |
|
Р1 |
600м |
||||
|
SBAS |
2.0 |
||||
|
DGPS |
0.9 |
||||
|
RT2502 |
Р2 |
3 м |
0,36 м/с |
0.05 ° |
0.15 ° |
|
Р1 |
0,25 %от пр. пути |
||||
|
SBAS |
2.0 |
||||
|
DGPS |
0.9 |
||||
|
RT2002 |
Р2 |
1,5 м |
0,36 м/с |
0.05° |
0.1 |
|
Р1 |
0,2 % от пр. пути |
||||
|
SBAS |
0.6 м |
||||
|
DGPS |
0.4 м |
||||
|
RTK |
0.02 м |
||||
|
RT3100 |
Р2 |
1.8 м |
0,36 м/с |
0.05° |
0.1 |
|
Р1 |
|
||||
|
SBAS |
0.6 м |
||||
|
DGPS |
0.4 м |
||||
|
RT3102 |
Р2 |
1,8 м |
0,36 м/с |
0.05° |
0.1 |
|
Р1 |
|
||||
|
SBAS |
0.6 м |
||||
|
DGPS |
0.4 м |
||||
|
RT3002 |
Р2 |
1,5 м |
0,18 м/с |
0.03° |
0.1 |
|
Р1 |
|
||||
|
SBAS |
0.6 м |
||||
|
DGPS |
0.4 м |
||||
|
RTK |
0,01 м |
||||
|
RT3003 |
Р2 |
1,5 м |
0,18 м/с |
0.03° |
0.1 |
|
Р1 |
|
||||
|
SBAS |
0.6 м |
||||
|
DGPS |
0.4 м |
||||
|
RTK |
0,01 м |
||||
|
Survey+ |
Р2 |
1,5 м |
0,18 м/с |
0.03° |
0.1 |
|
Р1 |
|
||||
|
SBAS |
0.6 м |
||||
|
DGPS |
0.4 м |
||||
|
RTK |
0,01 м |
||||
|
Survey+ L1 |
Р2 |
1,8 м |
0,36 м/с |
0.05 ° |
0.1 |
|
Р1 |
|
||||
|
SBAS |
0.6 м |
||||
|
DGPS |
0.4 м |
В таблице 1: Р1 — автономный режим; Р2- режим с коррекцией от СРНС; пр. путь — пройденный путь; SBAS — режим работы, при котором дифференциальные поправки определяются с помощью космических систем дифференциальной коррекции; DGPS — режим работы, при котором дифференциальные поправки определяются с помощью наземных систем дифференциальной коррекции; RTK — режим работы, при котором дифференциальные поправки определяются с помощью методов RTK.
Для навигационных систем подвижных наземных объектов иностранного производства возможны следующие режимы работы:
1. Автономный;
2. Автономный с коррекцией от СРНС;
3. Режим, который включает в себя дифференциальный режим работы СРНС.
Дифференциальный режим включает в себя получение данных от СРНС, получение дифференциальных поправок от систем дифференциальной коррекции (космических и наземных), их обработку и выдачу данных потребителю. Одно из назначений дифференциального режима работы состоит в повышении точности данных местоположения объекта, полученных от СРНС.
Для обеспечения дифференциального режима работы СРНС в навигационных системах иностранного производства используется соответствующее программное обеспечение, например TheSplitBox для системы Ekinox-N. В данном программном обеспечении осуществляется обработка данных как от датчиков, входящих в состав системы, так и от систем дифференциальной коррекции и их обработку.
Анализ данных из таблиц 1 и 2 показывает, иностранные и отечественные навигационные системы имеют примерно одинаковые точностные характеристики по скорости, углам крена курса и тангажа, что обусловлено применением ИНС. Значительные значения в показателях точности позиционирования свидетельствуют о применении в иностранных навигационных системах методов для повышения точности данных СРНС. Данные методы реализуются за счет использования дифференциального режима работы СРНС и получения поправок с помощью космических и наземных систем дифференциальной коррекции в навигационных системах подвижных наземных объектов, которое приводит к снижению СКО позиционирования во много раз. В рассмотренных навигационных системах подвижных наземных объектов отечественного производства дифференциальный режим работы СРНС не реализован по причине отсутствия аналогов таких систем как DGPS и RTK для систем навигации подвижных наземных объектов.
Наиболее перспективным направлениями в развитии систем навигацииотечественного производства являются:
1. Реализация дифференциального режима работы СРНС за счет использования в качестве системы дифференциальной коррекции системы дифференциальной коррекции и мониторинга Глонасс (СДКМ) совместно с внедрением соответствующего прогаммного обеспечения;
2. Внедрение нового программного обеспечения, позволяющего снизить вред от попадания данных от СРНС — создание алгоритмов обработки информации с использованием различных методов, позволяющих обеспечить реконфигурацию структуры навигационной системы, например методов марковской теории оценивания случайны процессов.
Литература:
1. Комраков Д. В. Навигационные комплексы наземных мобильных средств / Д. В. Комраков // Технические науки: теория и практика: материалы междунар. заоч. науч. конф. (г. Чита, апрель 2012 г.). — Чита: Издательство Молодой ученый, 2012. — С. 47–49.
2. А. В. Журавлев, В. М. Безмага. Навигационные комплексы наземных мобильных средств// Новости навигации — 2009 — № 1 — С. 29–36.
3. Система топографического ориентирования «Трона-1» //Обозрение армии и флота — 2007. — № 4.
4. Сурков В. О. Системы навигации подвижных наземных объектов и их характеристики/ В. О. Сурков // Молодой ученый. — 2013. — № 7. — С. 76–79.
5. Сурков В. О. Системы навигации подвижных наземных объектов и их характеристики / В. О. Сурков // Молодой ученый. — 2015. — № 9. — С. 298–302.
