В статье приведен сравнительный анализ существующих на рынке гидроакустических модемов. Представлены результаты экспериментальной проверки отечественного гидроакустического модема. Приведены теоретические расчеты дальности действия разработанного гидроакустического модема.
Ключевые слова: гидроакустический модем, эксперимент, автономный необитаемый подводный аппарат, модуляция.
В настоящее время в подводной среде передача информации осуществляется с помощью акустических волн. Актуальность создания надёжной системы передачи информации в подводной среде с помощью акустических волн обусловлена бурным развитием исследований глубин мирового океана с помощью автономных необитаемых подводных аппаратов (АНПА). Для управления подводными аппаратами необходимо организовать беспроводную линию связи под водой, например между надводным судном и АНПА. Для оперативного управления АНПА [1] и передачи телеметрии требуется канал передачи информации не менее нескольких Кб/сек.
Целью статьи является сравнительный анализ существующих модемов и представление результатов экспериментальных исследований отечественного модема нового поколения.
В настоящее время на рынке представлены гидроакустические модемы фирм Aquatec [2, 3], Sonardyne [4, 5], LinkQuest [6–10], Штиль [11–12] и др.
Возможности современных модемов позволяют передавать данные со скоростями до 48 кбит/с на дистанциях до 1–2 км (модем S2CR 40/80 фирмы EvoLogics GmbH), либо до 7–10 км со скоростью 2,5 кбит/с (UWM10000) [13]. В указанных разработках используются фазовая манипуляция, запатентованная технология модуляции S2C [14], частотная модуляция и др. Заявленные скорости передачи информации достигаются при определённых условиях в гидроакустическом канале. Однако реальные условия разнообразны и такие явления, как рефракция, рассеяние, реверберация и др. [15–18] приводят к тому, что акустический сигнал на приёмной стороне является искажённым. Искажения принимаемого сигнал значительно снижают скорость передачи данных по гидроакустическому каналу.
Одним из путей снижения влияния искажений принимаемого сигнала на качество демодуляции является разработка алгоритмического обеспечения для цифрового синтеза сигналов в передатчике и их цифровой обработки в приёмнике [19]. Таким образом, разработка перспективных и модернизация существующих отечественных гидроакустических модемов для АНПА может быть основана на синтезе сложных сигналов в передатчике и алгоритмов их обработки в приёмнике. В таблице 1 приведен сравнительный анализ гидроакустических модемов.
Таблица 1
Сравнительный анализ гидроакустических модемов
|
Название |
Страна |
Модуляция |
Параметры |
Скорость передачи информации |
|
AQUAmodem (Aquatec) |
США |
MFSK |
Глубина 3000 м дальность 3 км |
300 бит/с |
|
UCOM Dir LMF (Sonardyne) |
Англия |
QPSK |
Глубина 3000 м дальность 3 км |
10 кбит/с |
|
EvoLogics S2C M Mini |
Германия |
S2C |
Глубина 1000–2000 м Дальность 1000–3500 м |
13,9–31,2 кбит/с |
|
Modems S2C R 12/24 |
Глубина 6000 м Дальность 6000 м |
до 9,2 кбит/с | ||
|
Develogic Modular Hydro Acoustic Modem |
Германия |
OFDM-MDPSK |
Глубина 1950 м 6000 м Дальность 30 000 м |
7000 бит/с 3400 бит/с 145 бит/с |
|
Модем Концерн «Океан прибор» НИИ «Штиль» |
Россия |
OFDM |
Дальность 1300 м BER 10–3–10–9 |
13,95 кбит/с |
|
Разрабатываемый гидроакустический модем |
Россия |
QAM |
Глубина 6000 м дальность 30 км BER 10–6 |
до 25,5 кбит/с (но не менее 6,5 кбит/с, зависит от гидроакустического канала) |
Основными техническими характеристиками гидроакустического модема являются: дальность действия, скорость передачи данных, полоса частот излучаемых сигналов, центральная частота.
Для оценки ожидаемой дальности действия модема использовались статистические модели зависимости ослабления акустического сигнала с увеличением дистанции между передатчиком и приёмником, а также статистические модели помех, возникающих в подводной среде. Эти модели использовались для вычисления средней дальности действия модема по совокупности различных реализаций подводного канала.
Расчетная средняя дальность действия модема представлена на рисунке 1.
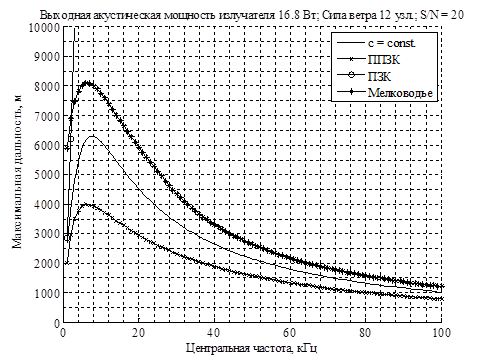
Рис. 1. Зависимость дальности от частоты
Предварительные оценки зависимости дальности действия от центральной частоты излучения сигналов показали, что для излучения акустических сигналов целесообразно использовать центральную частоту около fо. = fопт. ~ 9–11 кГц. На основании этих оценок можно показать, что ожидаемая в среднем дальность действия подводной связи (без учёта зон тени) при акустической мощности излучателя 16,8 Вт составляет:
- около 150 км в подводном звуковом канале (ПЗК).
- от 4 км до 8 км — приповерхностный звуковой канал и мелководье (ППЗК).
Для оценки ожидаемой средней скорости передачи информации выполнялись расчёты на основе соотношений, связывающих скорость передачи информации, полосу частот и скорость кодирования. Для проведения экспериментов в открытом водоеме был использован излучатель с помощью которого можно достичь полосы частот 10 кГц и разработан приемник и передатчик который позволит обеспечить отношение сигнал/шум при котором возможно использование модуляции QAM-16 (4 бита в символе), тогда скорость передачи информации = 640 несущих *4 бита *16 символов =40960 бит/секунду = 40 Кб/сек при полосе 10 кГц. Если учитывать помехоустойчивое кодирование со скоростью кодера 2/3, то скорость снизиться до 25,5 Кб/сек.
В таблице 2 приведены значения скоростей передачи информации для различной полосы частот в ППЗК.
Таблица 2
Параметры гидроакустического модема
|
Полоса, кГц |
Модуляция, скорость кодирования |
Скорость передачи информации |
|
2 |
QPSK, ½ |
1,2 Кбит/сек |
|
4 |
QPSK, ½ |
2,4 бит/сек |
|
10 |
QPSK. 2/3 |
8,0 бит/сек |
|
10 |
QAM-16, 2/3 |
25,5 бит/сек |
Моделирование работы и макетирование гидроакустического модема выполнялось для полосы 10 кГц. Существенным ограничением в скорости передачи данных макета гидроакустического модема является полоса пропускания излучателя. Основные части гидроакустического модема показаны на рисунке 2.
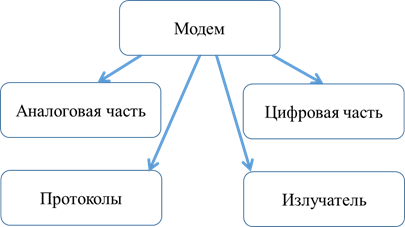
Рис. 2. Основные составные части гидроакустического модема
Для экспериментальной проверки прототипа гидроакустического модема был разработан макет, с помощью которого проверялись используемые в модеме алгоритмы цифрового формирования и демодуляции сигналов. Для преобразования аналогового сигнала в акустические колебания использовался излучатель, основанный на пьеза плёнке. Схема эксперимента приведена на рис. 3.
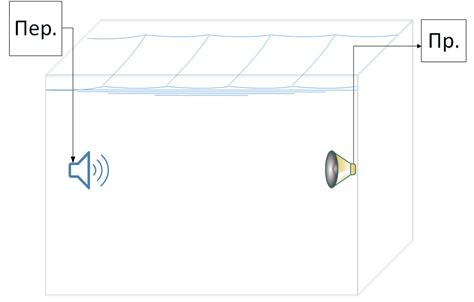
Рис. 3. Схема эксперимента
Проверка разработанного макета осуществлялась в бассейне 25x8x2,5 метров. Для наглядности результатов проверки использовался графический интерфейс, который показан на рис. 4. Расположение передатчика и приемника при экспериментальной проверки модема показано на рис. 5.
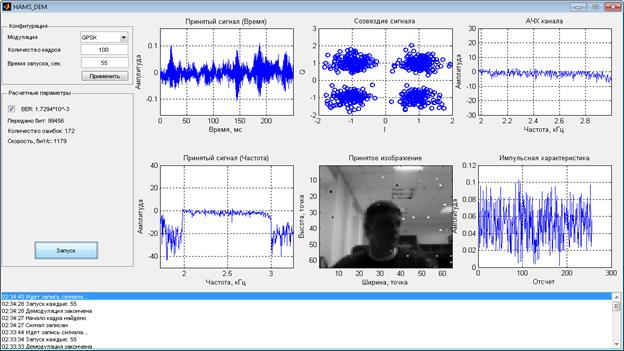
Рис. 4. Фотография результата эксперимента в бассейне 25 м
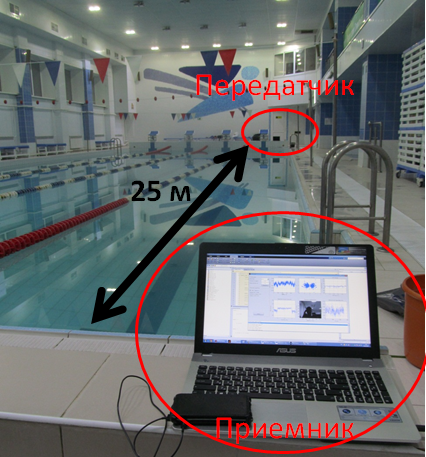
Рис. 5. Фотография эксперимента в бассейне 25 м
При проверке работоспособности модема в бассейне на дальности 25м получены технические характеристики, которые приведены в таблице 3.
Таблица 3
Технические характеристики макета модема в бассейне на дальности 25м
|
Отношение сигнал/шум, дБ |
12 |
|
Кол-во ошибок, % |
0,2 |
|
Полоса сигнала, кГц |
1,0 |
|
Скорость передачи данных, Кбит/сек |
1,2 |
Указанные в таблице 3 количественные характеристики отличаются не более чем на 5 % от результатов, полученных при моделировании работы алгоритмов гидроакустического модема. Вероятно, это обусловлено несовершенством модели гидроакустического канала, которое заключается, прежде всего, в различии значений реальных задержек и амплитуд отражённых сигналов от значений, генерируемых моделью гидроакустического канала.
Испытания макета гидроакустического модема показали, что применяемые математические модели передатчика и приёмника, а также гидроакустического канала позволяют с достаточной для практики точностью оценить ожидаемые скорость передачи данных и битовую вероятность ошибки.
Перспективными направлениями исследований в этой области являются: применение и синтез цифровых способов обработки сигналов, увеличение дальности связи, использование эффективных сигнально-кодовых конструкций, разработка новых принципов организации связи и т. д.
В результате проведенных исследований для разработки модема выбрана многочастотная модуляция, которая позволяет повысить скорость передачи информации в гидроакустическом канале и устранить искажения из-за многолучевого гидроакустического канала за счет цифровой обработки сигналов. Экспериментальная проверка работоспособности макета гидроакустического модема в бассейне подтвердила адекватность используемых при проектировании математических моделей.
Литература:
1. Лаптин С. В. Гидроакустическая связь как средство управления силами военно-морского флота. Состояние, перспективы развития. Материалы конференции «Гидроакустическая связь и гидроакустические средства аварийно-спасательного назначения». — 2007.
2. Han S. et al. Evaluation of underwater optical-acoustic hybrid network //Communications, China. — 2014. — Т. 11. — №. 5. — С. 49–59.
3. Pusey G., Duncan A. An investigation of oceanographic parameters affecting acoustic modem performance for horizontal data transmission //Underwater Acoustic Measurements: Technologies and Results, Nafplion, Greece. — 2009.
4. Bowen A. D. et al. An Un-Tethered ROV for Routine Access and Intervention in the Deep Sea.
5. Khalighi M. A. et al. Underwater wireless optical communication; recent advances and remaining challenges //Transparent Optical Networks (ICTON), 2014 16th International Conference on. — IEEE, 2014. — С. 1–4.
6. Yu X. Wireline quality underwater wireless communication using high speed acoustic modems //OCEANS 2000 MTS/IEEE Conference and Exhibition. — IEEE, 2000. — Т. 1. — С. 417–422.
7. Wills J., Ye W., Heidemann J. Low-power acoustic modem for dense underwater sensor networks //Proceedings of the 1st ACM international workshop on Underwater networks. — ACM, 2006. — С. 79–85.
8. Yan H. et al. A DSP implementation of OFDM acoustic modem //Proceedings of the second workshop on Underwater networks. — ACM, 2007. — С. 89–92.
9. Chitre M. Underwater acoustic communications in warm shallow water channels //Faculty of Engineering. — 2006.
10. Benson B. et al. Design of a low-cost underwater acoustic modem //Embedded Systems Letters, IEEE. — 2010. — Т. 2. — №. 3. — С. 58–61.
11. Кранц В. З., Сечин В. В. О повышении скорости передачи системы связи со сложными сигналами в условиях многолучевого распространения Материалы конференций «Гидроакустическая связь и гидроакустические средства аварийно-спасательного назначения» — 2007.
12. Ефимов С. Г. Универсальный метод формирования дискретного шумоподобного сигнала с требуемыми параметрами Материалы конференций «Гидроакустическая связь и гидроакустические средства аварийно-спасательного назначения» — 2003.
13. Wang J. et al. Data collection with multiple mobile actors in underwater sensor networks //Distributed Computing Systems Workshops, 2008. ICDCS'08. 28th International Conference on. — IEEE, 2008. — С. 216–221.
14. Toso G. et al. Field experiments for dynamic source routing: S2C EvoLogics modems run the SUN protocol using the DESERT Underwater libraries //Oceans, 2012. — IEEE, 2012. — С. 1–10.
15. Lynch J. F. et al. Acoustic ducting, reflection, refraction, and dispersion by curved nonlinear internal waves in shallow water //Oceanic Engineering, IEEE Journal of. — 2010. — Т. 35. — №. 1. — С. 12–27.
16. Sato H., Fehler M. C., Maeda T. Seismic wave propagation and scattering in the heterogeneous earth. — Berlin: Springer, 2012. — Т. 496.
17. Smirnov I. P., Gurbatov S. N., Khil’ko A. A. Formation of high-frequency surface reverberation by excitation of directed acoustic pulses in oceanic waveguides //Radiophysics and quantum electronics. — 2006. — Т. 49. — №. 5. — С. 333–343.
18. Abraham D. A., Lyons A. P. Reverberation envelope statistics and their dependence on sonar bandwidth and scattering patch size //Oceanic Engineering, IEEE Journal of. — 2004. — Т. 29. — №. 1. — С. 126–137.
19. Antoniou A. Digital signal processing. — Toronto, Canada:: McGraw-Hill, 2006.
[1] Работа выполнена за счет средств субсидии в рамках реализации Программы повышения конкурентоспособности ТПУ.

