Схема управления униполярным шаговым двигателем представляет собой массив транзисторных ключей, управляемых подаваемым на них импульсами. Недостатками такого подхода являются большие габариты схемы управления и необходимость использования параллельной передачи данных. Исходя из этого перед нами стоит задача реализовать схему одноканального управления униполярным шаговым двигателем с использованием интегральной микросхемы ULN2003a и реализация управления микросхемой при помощи микроконтроллера.
Управление углом поворота униполярного шагового двигателя осуществляется подачей тока на обмотки статора в определенной последовательности. Отводы от середины обмоток подключаются и источнику питания. Остальные 4 вывода шагового двигателя должны в определенной последовательности подключаться к минусу источника питания.
Аппаратная реализация заключается в осуществлении коммутации выводов в определенной последовательности. Для этого используем специальную интегральную микросхему ULN2003a, разработанную компанией Texas Instuments. Микросхема содержит в себе 7 транзисторных ключей, собранных по схеме Дарлингтона. Также на выводах данной микросхемы уже содержаться защитные диоды и резисторы в базовых цепях. За счет применения данной микросхемы мы получаем возможность управлять шаговым двигателем при помощи обычных цифровых микросхем без использования дополнительных дискретных элементов в схеме управления. Структурная схема микросхемы ULN2003a показана на рисунке1,а.
Для управления микросхемой требуется параллельная передача 4 бит данных, что является не удобным. Для реализации одноканального управления удобно использовать микроконтроллер. С этой целью нами был применен унифицированный модуль Arduino, выполняющий роль контроллер. В итоге мы получаем законченную схему управления, показанную на рисунке 1,б.
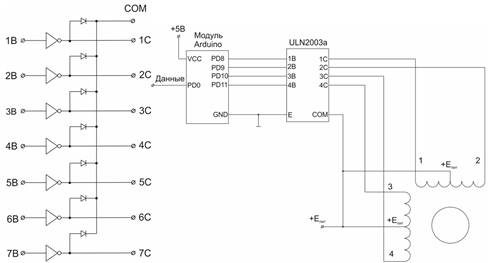
а) б)
Рис. 1: а — Структура интегральной схемы ULN2003a; б — схема подключения к модулю Arduino
Для реализации обработки внешних данных и формирования необходимой последовательности импульсов была написана управляющая программа. Программа написана на языке C++ в Aduino-совместимой среде AduinoIDE. Данные об угле поворота и скорости вращения подаются на цифровой вход модуля Arduino. В соответствии с этими данными на цифровых выводах модуля формируется требуемая последовательность импульсов. Таким образом, в ходе работы удалось добиться минимальных габаритов схемы и простоты реализации схемы управления углом поворота шагового двигателя.
Литература:
1. Одноканальное управление шаговым двигателем / Д. В. Воробьев и др. // Молодой ученый. — 2015. — № 3. — С. 110–113.
2. Бростилов С. А. Метрологический анализ измерительной подсистемы информационно-измерительной системы для исследования средств воздушного охлаждения / С.А Бростилов, Н. В. Горячев, Т. Ю. Бростилова // Труды международного симпозиума Надежность и качество. 2014. Т. 2. С. 127–129.
3. Емашкина Т. С. Подводные камни импортозамещения в электронике / Т. С. Емашкина, Н. В. Горячев, Н. К. Юрков // Молодой ученый. — 2015. — № 3. — С. 132–135.
4. Горячев Н. В. Исследование и разработка средств и методик анализа и автоматизированного выбора систем охлаждения радиоэлектронной аппаратуры / Горячев Н. В., Танатов М. К., Юрков Н. К. // Надежность и качество сложных систем . 2013. № 3. С. 70–75.
5. Горячев Н. В. Комплексы и системы теплофизического проектирования электронной аппаратуры / Н. В. Горячев, Ю. А. Сивагина, Е. А. Сидорова // Цифровые модели в проектировании и производстве РЭС. 2011. № 16. С. 178.
6. Горячев Н. В. Методика формирования контура печатной платы в САПР электроники с помощью сторонней механической САПР / Н. В. Горячев, Н. К. Юрков // Цифровые модели в проектировании и производстве РЭС. 2010. № 15. С. 127.
7. Горячев Н. В. Концептуальная схема разработки систем охлаждения радиоэлементов в интегрированной среде проектирования электроники / Н. В. Горячев, Н. К. Юрков // Проектирование и технология электронных средств. 2009. № 2. С. 66–70.
8. Горячев Н. В. Проектирование топологии односторонних печатных плат, содержащих проволочные или интегральные перемычки / Н. В. Горячев, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2011. Т. 2. С. 122–124.
9. Петрянин Д. Л. Анализ систем защиты информации в базах данных / Д. Л. Петрянин, Н. В. Горячев, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 115–122.
10. Подложенов К. А. Разработка энергосберегающих технологий для теплиц / К. А. Подложёнов, Н. В. Горячев, Н. К. Юрков // Современные информационные технологии. 2012. № 15. С. 193–194.
11. Шуваев П. В. Формирование структуры сложных многослойных печатных плат / П. В. Шуваев, В. А. Трусов, В. Я. Баннов, И. И. Кочегаров, В. Ф. Селиванов, Н. В. Горячев // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 364–373.
12. Grab I. D., Sivagina U. A., Goryachev N. V., Yurkov N. K. Research methods of cooling systems. Innovative Information Technologies: Materials of the International scientific — рractical conference. Part 2. –M.: HSE, 2014, 443–446 pp.
13. Стрельцов Н. А. SDR-трансиверы и их применение / Н. А. Стрельцов, Н. В. Горячев, В. А. Трусов // Труды международного симпозиума Надежность и качество. 2014. Т. 1. С. 281–282.
14. Воробьев Д. В. Характеристики и источники механических воздействий на радиоэлектронные средства / Д. В. Воробьев, Н. С. Реута, Н. В. Горячев // Молодой ученый. — 2014. — № 19. — С. 182–185.
15. Трусов В. А. Программно-определяемые приемопередатчики и их применение / В. А. Трусов, Н. В. Горячев, В. Я. Баннов // Молодой ученый. — 2014. — № 21. — С. 234–236.
16. Воробьев Д. В. Применение унифицированных электронных модулей при создании генератора гармонических колебаний / Д. В. Воробьев, Н. В. Горячев, Н. К. Юрков // Молодой ученый. — 2014. — № 20. — С. 114–117.
17. Шишкин Ф. Д. Особенности программируемых логических устройств / Ф. Д. Шишкин, Н. В. Горячев, В. А. Трусов // Молодой ученый. — 2015. — № 1. — С. 115–117.
18. Прошин А. А. Разработка цифрового секундомера / А. А. Прошин, С. А. Бростилов, Н. В. Горячев // Молодой ученый. 2015. № 2. С. 187–190.
19. Горячев Н. В. Тепловая модель учебной системы охлаждения / Н. В. Горячев, Д. Л. Петрянин // Прикаспийский журнал: управление и высокие технологии. 2014. № 2. С. 197–209.
20. Петрянин Д. Л. Побайтный анализ файлов / Д. Л. Петрянин, Н. В. Горячев, Н. К. Юрков // Современные информационные технологии. 2014. № 20. С. 124–132
21. Горячев Н. В. Концепция создания автоматизированной системы выбора теплоотвода электрорадиоэлемента / Н. В. Горячев, Н. К. Юрков // Современные информационные технологии. 2010. № 11. С. 171–176.
22. Трифоненко И. М. Обзор систем сквозного проектирования печатных плат радиоэлектронных средств / И. М. Трифоненко, Н. В. Горячев, И. И. Кочегаров, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2012. Т. 1. С. 396–399.
23. Граб И. Д. Алгоритм функционирования компьютерной программы стенда исследования теплоотводов/ И. Д. Граб, Н. В. Горячев, А. В. Лысенко, Н. К. Юрков //Труды международного симпозиума Надежность и качество. 2011. Т. 1. С. 244–246.
24. Горячев Н. В. Уточнение тепловой модели сменного блока исследуемого объекта / Н. В. Горячев, И. Д. Граб, Н. К. Юрков // Труды международного симпозиума Надежность и качество. 2013. Т. 1. С. 169–171.
25. Реута Н. С. Разновидности механических воздействий в радиоэлектронной аппаратуре / Н. С. Реута, Н. В. Горячев, В. А. Трусов // Молодой ученый. — 2014. — № 21. — С. 224–226.

