Проблемы высокоточной радиовысотометрии актуальны при проектировании космических систем дистанционного зондирования земли, систем посадки межпланетных космических кораблей, при модернизации оборудования летательных аппаратов. Наиболее популярными являются вопросы оценки погрешностей измерения высоты радиотехническими методами, вызванных влиянием аппаратуры и неоднородностей на трассе распространения радиоволн, а также построения и разработки методов компенсации указанных источников погрешностей. Наиболее изученной является разновидность аппаратурной погрешности радиовысотомера, вызванная внутренними шумами аппаратурой, когда главным измерительным элементом радиовысотомера является комплекс из корреляционного приёмника и порогового устройства, а случайные изменения квадратурных составляющих сигнала во времени вызваны аддитивным белым гауссовым шумом. Однако внутренние шумы аппаратуры не являются единственным источником погрешности. Так, в любом радиотехническом приёмном устройстве сверхвысокочастотного диапазона имеется преобразователь частоты, содержащий гетеродин. Ясно, что случайные флуктуации центральной частоты гетеродина будут влиять на точность измерения высоты, как частотным, так и импульсным методом. К настоящему моменту вопрос о количественных оценках точности измерения высоты, вызванные совместным влиянием нестабильности частоты гетеродина и внутренними шумами приёмника радиовысотомера, практически не решён. Кроме того, отсутствуют сведения, позволяющие сравнить аппаратурную составляющие погрешности измерения высоты как частотным (при линейно-частотной модуляции), так и импульсным (фазокодовая манипуляции) методами.
В данной работе приведено описание структурных схем, моделей принимаемых антенной радиовысотомера сигналов в условиях свободного пространства. Освещены теоретические оценки аппаратурных погрешностей для наиболее распространённых схем построения радиовысотомеров с линейно-частотной и фазокодовой модуляцией, работающих в режиме однократного измерения высоты.
Ключевые слова: радиовысотомер; аппаратурная погрешность; внутренние шумы; отношение сигнал/шум; нестабильность частоты гетеродина; модель сигнала; частотный метод; временной метод; линейно-частотная модуляция; фазокодовая манипуляция; метод статистических испытаний; частота биений; корреляционный метод.
Радиовысотомеры предназначены для измерения высоты летательного аппарата над подстилающей поверхностью и относятся к классу автономных радионавигационных установок, не требующих дополнительного наземного оборудования [1–4]. Известно, что в радиовысотомерах используется радиолокационный принцип определения высоты частотным или временным (импульсный) методами [5–8]. Основными проблемами высокоточной радиовысотометрии являются: недостаточно высокая точность измерения, слабое использование априорной информации и, наконец, отсутствие разработок по внедрению оптимальных или квазиоптимальных методов обработки отражённых сигналов [9–12].
Проблема обеспечения высокоточных измерений высоты решена лишь частично для определённых условий, в частности, для сравнительно гладкой поверхности, малом уровне внутренних шумов и высокостабильных генераторов передатчиков [3, 4]. В реальных же условиях измерение высоты производится относительно неровной поверхности, а создание высокостабильных генераторов передатчика и малошумящих усилителей в каскадах приёмника радиовысотомера на данном этапе технологического развития существенно увеличивает стоимость метрологического оборудования. В частности, такая ситуация характерна для прецизионных радиовысотомеров, устанавливаемых на борту космических аппаратов, осуществляющих дистанционное зондирование с целью уточнения формы геоида, картирования гравитационных аномалий и аномалий рельефа дна на шельфах и т. д.
Перспективные технические решения, способствующие решению проблем космической радиовысотометрии, связаны c:
- повышением энергетического потенциала за счёт использования квазинепрерывного линейно-частотно- или фазокодомодулированного сигнала;
- внедрением аппарата синтезирования апертуры, в увеличении девиации частоты зондирующего сигнала;
- применением методов компенсации фазовых искажений отражённых сигналов по измерениям глобальных навигационных систем GPS/ГЛОНАСС.
Однако указанные технические решения не устраняют ошибку измерения высоты из-за внутренних шумов приёмной аппаратуры и нестабильности частот излучения гетеродинов [9–12].
Известные теоретические сведения позволяют вычислить погрешность радиовысотомеров с линейно-частотной и фазокодовой модуляцией, учитывая только внутренние шумы приёмной аппаратуры.
В данной работе делается попытка оценить и сравнить погрешности измерения высот для радиовысотомеров с линейно-частотной и фазокодовой модуляциями, вызванные одновременно внутренними шумами приёмной аппаратуры и нестабильностью частоты гетеродина. Приведённые оценки получены методом моделирования и могут быть использованы на этапе системотехнического проектирования радиовысотомеров.
Структурные схемы радиовысотомеров с линейно-частотной модуляцией и фазокодовой манипуляцией. Рассмотрим схемы радиовысотомеров с линейно-частотной модуляцией (ЛЧМ) и фазокодовой манипуляцией (ФКМ), для которых в дальнейшем будут произведены оценки аппаратурных погрешностей.
В радиовысотомере с линейно-частотной модуляцией (рисунок 1) можно выделить передающий и приёмный тракты. В передающий тракт входят: генератор ЛЧМ сигнала, усилитель мощности, делитель мощности, ферритовый вентиль (ФВ), передающая антенна. Генератор ЛЧМ сигнала формирует зондирующий сигнал с симметричным пилообразным законом изменения частоты на периоде модуляции. Сигнал генератора sг(t) поступает на усилитель мощности, который предназначен для получения нужного уровня сигнала на выходе антенны передатчика, поскольку при распространении сигнала имеется ослабление, и, кроме того, часть мощности будет отдаваться в приёмный тракт. Выходной сигнал sу(t) усилителя мощности поступает на делитель мощности, который имеет два выхода. Делитель мощности предназначен для получения идентичных по форме сигналов, но разных по уровню. С одного выхода сигнал sдм1(t) делителя мощности поступает на следующее звено передатчика, а с другого выхода сигнал sдм2(t) поступает в приёмный тракт. Ферритовый вентиль передатчика, на вход которого подаётся сигнал sдм1(t), осуществляет развязку трактов передачи и приёма. С выхода ферритового вентиля сигнал sизл(t) подаётся на антенну передатчика Апер. Антенна передатчика излучает зондирующий сигнал в пространство по направлению к поверхности до которой следует измерить высоту. В приёмный тракт входят: антенна приёмника, ферритовый вентиль, малошумящий усилитель, перемножитель сигналов, усилитель промежуточной частоты, фильтр низких частот (ФНЧ), аналого-цифровой преобразователь (АЦП), вычислитель, индикатор. Антенна приёмника Апр предназначена для преобразования отражённой электромагнитной волны в сигнал sпр(t), который поступает на ферритовый вентиль приёмника. Выходной сигнал ферритового вентиля sфв(t) поступает на малошумящий усилитель (МШУ), который предназначен для усиления принимаемого сигнала sфв(t) до уровня, необходимого для работы перемножителя сигналов.
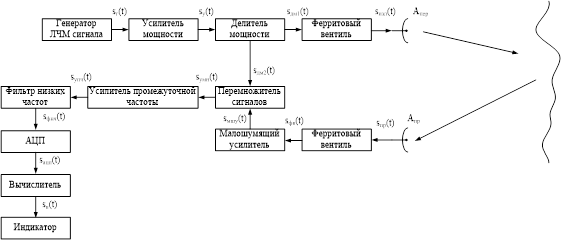
Рис. 1. Обобщённая структурная схема радиовысотомера с линейно-частотной модуляцией
На вход перемножителя подаются сигналы выхода с делителя мощности передатчика sдм2(t) и малошумящего усилителя sмшу(t). С выхода перемножителя сигнал sумн(t) поступает на усилитель промежуточной частоты, в котором усиливается до уровня, необходимого для работы АЦП с учётом влияния фильтра низких частот. Выходной сигнал усилителя промежуточной частоты sупч(t) поступает на ФНЧ, на выходе которого выделяется полезный сигнал разностной частоты sфнч(t). АЦП производит преобразование аналогового сигнала sфнч(t) в цифровой. Сигнал sацп(t) с выхода АЦП поступает на вычислитель, в котором по сигналу разностной частоты производится вычисление разностной частоты и соответственно высоты. Блок вычислителя формирует на входе индикатора сигнал sв(t), пропорциональный измеренной высоте и соответствующий показаниям высоты на индикаторе.
В импульсном радиовысотомере с фазокодовой манипуляцией (рисунок 2) можно выделить канал передачи, приёма, блока управления, генератора синхросигнала, синтезатор частот и вычислителя. Канал приёма включает в себя входную цепь (ВЦ), усилитель радиочастоты (УРЧ), смеситель (СМ), усилитель промежуточной частоты (УПЧ), двухканальный аналого-цифровой преобразователь (АЦП). Общим для канала приема и передачи является гетеродин, синхронизируемый генератором синхросигнала. Блок управления состоит главным образом из центрального процессора и набора буферных преобразователей, согласующих по уровню сигналы процессора в сигналы шин управления. Генератор синхросигнала представляет собой стандарт частоты. Синтезатор частот преобразовывает частоту стандарта в частоты, необходимые для работы блоков модуля. Вычислитель представляет собой блок, состоящий из сигнального процессора, набора памяти ОЗУ, микросхемы памяти и дискового накопителя. Неотъемлемыми элементами блока являются коммутатор, переключающий каналы приема и передачи к антенне через тракт сверхвысокой частоты (ТСВЧ) и блок калибровки канала приема. Блок канала калибровки канала приема по сигналу разрешения от блока управления осуществляет измерение уровней и фазовых сдвигов (задержек) на выходах АЦП, УПЧ, СМ, УРЧ и ВЦ таким образом, чтобы использовать эти данные для частичной компенсации аппаратурных ошибок измерения высоты.
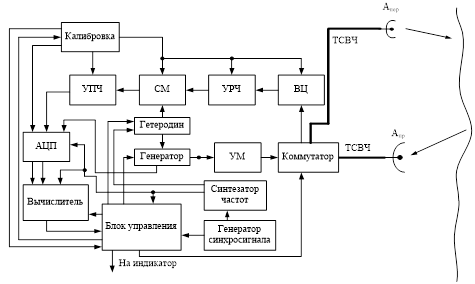
Рис. 2. Обобщённая структурная схема радиовысотомера с фазокодовой манипуляцией
В импульсном радиовысотомере генератор синхросигнала, синтезатор частот и гетеродин в процессе работы работают постоянно. По команде от блока управления аттенюатор генератора сигнала отключается (сигнал не ослабляется) и коммутатором сигнал от гетеродина либо без сдвига фаз, либо со сдвигом фаз (посредством фазовращателя) подаётся на вход аттенюатора в соответствие с видом псевдослучайной последовательности. С выхода аттенюатора сигнал подаётся на УМ, с которого через ТСВЧ подаётся на антенну. Сигнал с антенны излучается в окружающее пространство и достигает поверхности Земли. Переотражённый от поверхности Земли сигнал принимается антенной приёмника. Блоком управления в генераторе сигналов заблаговременно включается аттенюатор (сигнал гетеродина максимально ослабляется) и коммутатор переключает ТСВЧ с канала передачи на канал приёма. Сигнал с выхода ВЦ усиливается УРЧ до уровня, необходимого для работы СМ. СМ преобразует радиочастоту на частоту преобразования — 100 МГц и подаётся на вход УПЧ, который усиливает сигнал до уровня, необходимого для работы АЦП. АЦП преобразует аналоговый сигнал в отсчёты цифрового сигнала, которые подаются на вход вычислителя. Вычислитель оценивает высоту корреляционным методом спустя время после излучения зондирующего сигнала и передаёт результат вычисления в блок управления. На вход АЦП также подаётся сигнал с генератора ФКМ сигналов на промежуточной частоте, чтобы вычислитель определял высоту импульсным методом по данному опорному сигналу. С блока управления результат вычисления передаётся в индикатор.
При вычислении погрешности использовался алгоритм определения высоты. Для частотного радиовысотомера схема алгоритма представлена рисунке 3, а для импульсного радиовысотомера — на рисунке 4.
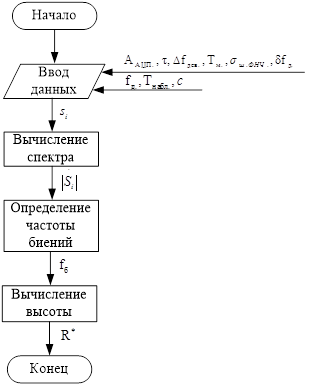
Рис. 3. Алгоритм оценки высоты частотным радиовысотомером
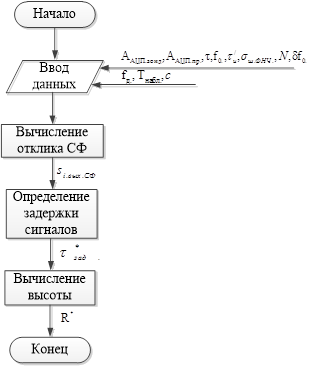
Рис. 4. Алгоритм оценки высоты импульсным радиовысотомером
Модели сигналов радиовысотомеров. Для получения оценок погрешностей оценивания высот радиовысотомерами, представленными на рисунках 1 и 2, определим модели сигналов, принимаемых радиовысотомером. Типовые самолётные радиовысотомеры работают на частотах от 4200 МГц до 4500 МГц и позволяют измерять высоты в диапазоне от 5 м до 2000 м с погрешностью не более 5 %. При таких параметрах зондирующий симметричный пилообразный сигнал частотного радиовысотомера (рисунок 5) будет иметь следующие параметры:
- центральная частота f0 = 4300 МГц;
- период модуляции Тм = 2,7 мс;
- частота модуляции fм = 370 Гц;
- девиация зондирующего сигнала Δfдев = 100 МГц.
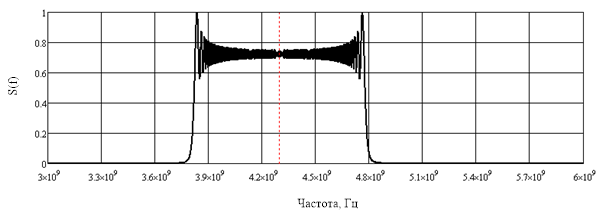
Рис. 5. Спектр ЛЧМ сигнала на центральной частоте 4,3 ГГц
Изменение во времени частоты зондирующего сигнала f(t) по симметричному пилообразному закону относительно центральной частоты  и девиацией
и девиацией  может быть записано аналитически как:
может быть записано аналитически как:
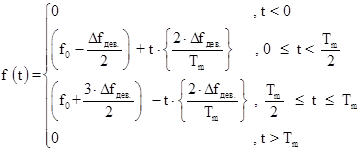 ,
,
где Tm — период девиации частоты зондирующего сигнала, т. е. время, за которое частота симметричного пилообразного сигнала изменяется от f0–0,5·Δfдев. до f0 + 0,5·Δfдев..
Модель зондирующего сигнала частотного радиовысотомера во временной области может быть записана как:
 ,
,
где А — амплитуда зондирующего сигнала,  — начальная фаза зондирующего сигнала,
— начальная фаза зондирующего сигнала,
n(t) — аддитивный белый гауссовский шум приёмника.
Для упрощения будем считать, что = 0 рад., поскольку её значение не влияет на измерение высоты.
Модель зондирующего сигнала импульсного радиовысотомера во временной области может быть записана как:
 ,
,
где A(t) — модулирующая псевдослучайная последовательность, закон которой задаётся производящим полиномом g(x),  — центральная частота, — начальная фаза (в дальнейшем = 0 рад.)
— центральная частота, — начальная фаза (в дальнейшем = 0 рад.)
Модулирующая последовательность A(t) определяется длительность парциального импульса и период последовательности, связанные между собой количеством импульсов. В данном случае, для обеспечения работы радиовысотомера на высотах до 2000 м параметры ФКМ сигнала выбраны следующими (рисунок 6):
- центральная частота = 4300 МГц;
- длительность парциального импульса τи = 100 нс;
- длительность импульса ФКМ сигнала τиФКМ = 20 мкс;
- количество парциальных импульсов ФКМ сигнала N = 200.
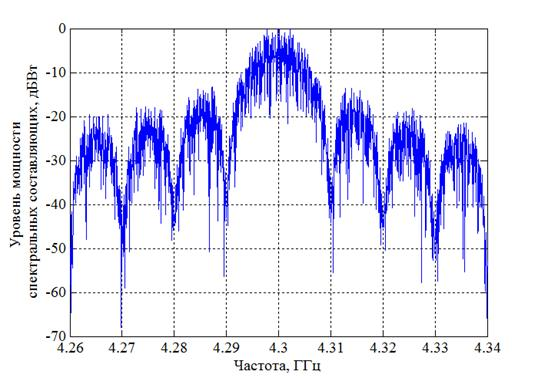
Рис. 6. Спектр ФКМ сигнала на центральной частоте 4,3 ГГц
Погрешности оценивания высот частотным и импульсным радиовысотомерами. Оценка погрешностей измерения частоты производится для известной высоты методом статистических испытаний. Для частотного радиовысотомера формирование сигнала  заключалось в установке задержки отражённого сигнала τ, соответствующей разностной частоте биений fб(t) = f(t) — f(t — τ), а также отношения сигнала к шуму на выходе ФНЧ (рисунок 1), т. е. параметра q = (AФНЧ.)2/σш.ФНЧ. Аналогичным образом, для импульсного радиовысотомера формирование сигнала заключалось в смещении принятого сигнала относительно излученного, его преобразовании на промежуточную частоту (рисунок 2) и прохождении через низкочастотный фильтр, а также добавлении аддитивного шума с параметром q.
заключалось в установке задержки отражённого сигнала τ, соответствующей разностной частоте биений fб(t) = f(t) — f(t — τ), а также отношения сигнала к шуму на выходе ФНЧ (рисунок 1), т. е. параметра q = (AФНЧ.)2/σш.ФНЧ. Аналогичным образом, для импульсного радиовысотомера формирование сигнала заключалось в смещении принятого сигнала относительно излученного, его преобразовании на промежуточную частоту (рисунок 2) и прохождении через низкочастотный фильтр, а также добавлении аддитивного шума с параметром q.
Нестабильность ξ генератора смесителя приёмника частотного радиовысотомера вводилась на этапе формирования сигнала биений как случайные изменения разностной частоты,  . Плотность распределения флуктуаций частоты биений описывалась равномерным законом.
. Плотность распределения флуктуаций частоты биений описывалась равномерным законом.
Нестабильность ξ генератора смесителя приёмника импульсного радиовысотомера вводилась на этапе преобразования частоты (рисунок 2) путём введения флуктуаций частоты гетеродина, распределённых по равномерному закону, т. е.  . При моделировании частота дискретизации составляла fд. = 10 ГГц.
. При моделировании частота дискретизации составляла fд. = 10 ГГц.
В таблицах 1, 2 и 3 показаны результаты оценок высот частотным радиовысотомером при различных задержках τ, отношении сигнал/шум q и нестабильности частот генераторов ξ.
Из приведённых результатов видно, что отношение сигнал/шум в меньшей степени влияет на точность измерения высоты, нежели нестабильность работы генератора сигналов. Радиовысотомер сохраняет работоспособность при нестабильностях генератора от 10–5 и выше.
Таблица 1
Оценки высот h изм. высотомером, ξ = 10–6
|
Задержка (τ), мкс |
Отношение сигнал/шум, дБ |
Истинная высота, hист., м |
Максимальная ошибка измерения, % | ||||
|
|
100 |
50 |
15 |
0 | |||
|
1 |
150,5 |
150,8 |
150,8 |
150,5 |
150,8 |
150,0 |
0,5 |
|
2 |
300,5 |
300,5 |
300,8 |
300,5 |
300,5 |
300,0 |
0,3 |
|
5 |
750,5 |
750,8 |
750,8 |
750,5 |
750,8 |
750,0 |
0,1 |
|
7 |
1050,8 |
1050,8 |
1050,8 |
1050,8 |
1050,8 |
1050,0 |
0,1 |
|
10 |
1500,5 |
1500,8 |
1500,8 |
1500,5 |
1500,8 |
1500,0 |
0,1 |

Таблица 2
Оценки высот h изм. радиовысотомером, ξ = 10–5
|
Задержка (τ), мкс |
Отношение сигнал/шум, дБ |
Истинная высота, hист., м |
Максимальная ошибка измерения, % | ||||
|
|
100 |
50 |
15 |
0 | |||
|
1 |
148,8 |
152,5 |
152,5 |
148,8 |
152,5 |
150,0 |
1,7 |
|
2 |
298,8 |
298,8 |
298,8 |
298,8 |
298,8 |
300,0 |
0,4 |
|
5 |
748,8 |
752,5 |
748,8 |
752,5 |
752,5 |
750,0 |
0,3 |
|
7 |
1052,5 |
1052,5 |
1048,8 |
1052,5 |
1052,5 |
1050,0 |
0,2 |
|
10 |
1502,5 |
1502,5 |
1502,5 |
1502,5 |
1498,8 |
1500,0 |
0,2 |
Таблица 3
Оценки высот h изм. радиовысотомером, ξ = 10–4
|
Задержка (τ), мкс |
Отношение сигнал/шум, дБ |
Истинная высота, hист., м |
Максимальная ошибка измерения, % | ||||
|
|
100 |
50 |
15 |
0 | |||
|
1 |
130,5 |
130,8 |
170,8 |
170,8 |
171,0 |
150,0 |
14,0 |
|
2 |
320,8 |
320,8 |
320,8 |
320,8 |
280,5 |
300,0 |
6,9 |
|
5 |
770,8 |
730,5 |
730,3 |
730,5 |
730,5 |
750,0 |
2,8 |
|
7 |
1070,8 |
1030,5 |
1070,8 |
1070,8 |
1070,8 |
1050,0 |
2,0 |
|
10 |
1480,5 |
1480,5 |
1480,5 |
1480,3 |
1520,8 |
1500,0 |
1,4 |

Из приведённых результатов видно, что отношение сигнал/шум и нестабильность частоты генераторов незначительно влияют на работу радиовысотомера. Малое влияние отношения сигнал/шум на погрешность измерения высоты связано с большой базой фазокодоманипулированного сигнала. Радиовысотомер сохраняет работоспособность даже при нестабильностях генератора равной 10–4 и меньше. Измерение частоты происходит с систематической ошибкой, равной не более 0,5 м, которая может быть устранена при калибровке.
В таблицах 4, 5 и 6 показаны результаты оценок высот импульсным радиовысотомером при различных задержках τ, отношении сигнал/шум q и нестабильности частот генераторов ξ.
Таблица 4
Оценки высот h изм. импульсным радиовысотомером, ξ = 10–6
|
Задержка (τ), мкс |
Отношение сигнал/шум, дБ |
Истинная высота, hист., м |
Максимальная ошибка измерения, % | ||||
|
|
100 |
50 |
15 |
0 | |||
|
1 |
150,51 |
150,51 |
150,51 |
150,50 |
150,51 |
150,0 |
0,34 |
|
2 |
300,51 |
300,51 |
300,51 |
300,50 |
300,39 |
300,0 |
0,17 |
|
5 |
750,51 |
750,51 |
750,51 |
750,51 |
750,53 |
750,0 |
0,07 |
|
7 |
1050,48 |
1050,48 |
1050,48 |
1050,48 |
1050,40 |
1050,0 |
0,05 |
|
10 |
1500,51 |
1500,51 |
1500,51 |
1500,48 |
1500,33 |
1500,0 |
0,03 |
Таблица 5
Оценки высот h изм. импульсным радиовысотомером, ξ = 10–5
|
Задержка (τ), мкс |
Отношение сигнал/шум, дБ |
Истинная высота, hист., м |
Максимальная ошибка измерения, % | ||||
|
|
100 |
50 |
15 |
0 | |||
|
1 |
150,51 |
150,51 |
150,51 |
150,50 |
150,45 |
150,0 |
0,34 |
|
2 |
300,51 |
300,51 |
300,50 |
300,50 |
300,48 |
300,0 |
0,17 |
|
5 |
750,51 |
750,51 |
750,51 |
750,50 |
750,47 |
750,0 |
0,07 |
|
7 |
1050,48 |
1050,48 |
1050,48 |
1050,47 |
1050,38 |
1050,0 |
0,05 |
|
10 |
1500,51 |
1500,51 |
1500,51 |
1500,50 |
1500,26 |
1500,0 |
0,03 |
Таблица 6
Оценки высот h изм. импульсным радиовысотомером, ξ = 10–4
|
Задержка (τ), мкс |
Отношение сигнал/шум, дБ |
Истинная высота, hист., м |
Максимальная ошибка измерения, % | ||||
|
|
100 |
50 |
15 |
0 | |||
|
1 |
150,45 |
150,45 |
150,45 |
150,42 |
150,42 |
150,0 |
0,30 |
|
2 |
300,45 |
300,45 |
300,45 |
300,42 |
300,21 |
300,0 |
0,15 |
|
5 |
750,45 |
750,45 |
750,45 |
750,47 |
750,33 |
750,0 |
0,06 |
|
7 |
1050,42 |
1050,42 |
1050,42 |
1050,42 |
1050,39 |
1050,0 |
0,04 |
|
10 |
1500,42 |
1500,42 |
1500,42 |
1500,42 |
1500,45 |
1500,0 |
0,03 |
Представленные результаты позволяют заключить, что погрешность:
1) импульсного радиовысотомера с фазокодовой манипуляцией малочувствителен к нестабильности частоты гетеродина, а при достаточно больших базах сигнала (от 200 и выше) практически не зависит и от отношения сигнал/шум. Так, при отношении сигнал/шум 15 дБ и нестабильности частоты гетеродина 10–4 погрешность измерения высоты не превышала 0,15 % по результатам моделирования;
2) частотного радиовысотомера малочувствительна к отношению сигнал/шум, но существенно зависит от нестабильности частот гетеродинов. Так, при отношении сигнал/шум 15 дБ и нестабильности частоты гетеродина 10–4 погрешность измерения высоты не превышала 14 % по результатам моделирования;
3) при прочих равных условиях, импульсных радиовысотомер с фазокодовой манипуляцией обеспечивает более чем на порядок меньшую погрешность измерения высоты.
Литература:
1. Егоров В. В. Вопросы точности аэрокосмической альтиметрии / В. В. Егоров, Мин-Хо Ка // Исследование Земли из космоса. — 2005. — № 5. — С. 48–55.
2. Арманд Н. А. Распространение широкополосных сигналов в дисперсионных средах // Радиотехника и электроника. — 2003. — Т. 48, № 9. — С.1045–1057.
3. Баскаков А. И. Перспективный высокоточный спутниковый альтиметр / А. И. Баскаков, В. В. Егоров // Современные проблемы дистанционного зондирования Земли из космоса. — 2008. — Т.5, № 1. — С. 225–228.
4. Гришечкин Б. Ю. Моделирование отраженного сигнала спутникового высокоточного океанографического радиовысотомера // Вопросы радиоэлектроники. Серия общетехническая. — 2005. — № 1. — С. 115–124.
5. Теоретические основы радиовысотометрии / Под ред. А. П. Жуковского. — М.: Сов. радио, 1979. — 320 с.
6. Коростелев А. А. Теоретические основы радиолокации / А. А. Коростелев, А. Ф. Клюев, Ю. А. Мельник; под ред. В. Е. Дулевича — М.: Сов. радио, 1978. — 608 с.
7. Денисов В. П. Радиотехнические системы / В. П. Денисов, Б. П. Дудко — Томск, 2006. — 253 стр.
8. Дудко Б. П. Космические радиотехнические системы: учеб. пособие / Б. П. Дудко. — Томск: Томск. гос. ун-т систем упр. и радиоэлектроники, 2007. — 291 с.
9. Васин В. В. Справочник-задачник по радиолокации / В. В. Васин, Б. М. Степанов. — М.: Сов.радио, 1977. — 320 с.
10. Тихонов. В. И. Статистический анализ и синтез радиотехнических устройств и систем: учебное пособие для вузов. — М.: Радио и связь, 1991. — 608 с.
11. Тихонов В. И. Статистическая радиотехника. — М.: Радио и связь, 1982. — 624 с.
12. Левин Б. Р. Теоретические основы статистической радиотехники. — М.: Советское радио, 1966. — 728 с.
[1] Работа выполнена за счет средств субсидии в рамках реализации Программы повышения конкурентоспособности ТПУ.

