Ввиду наличия необходимости совершенствования радиолокационных станций загоризонтного обнаружения коротковолнового диапазона волн (РЛС ЗГО КВ) в части увеличения точностных характеристик проводится анализ имеющихся возможностей по повышению точностных характеристик РЛС ЗГО КВ-диапазона с применением теории решения изобретательских задач (ТРИЗ) и системного инжиниринга. Полученные результаты позволяют оценить оптимальное направление развития РЛС ЗГО для успешного решения поставленных задач.
Предложенное решение позволяет значительно повысить точностные характеристики РЛС ЗГО, преодолеть предел развития в данном направлении, усилить контроль качества получаемой информации. Также предлагаемое решение позволит наметить дальнейшие перспективы развития данного направления (РЛС ЗГО) не только в части увеличения точностных и качественных характеристик, но и возможности освоения новых рынков сбыта изделий, в том числе выпуск новой продукции.
Ключевые слова: радиолокация, ионосфера, систематические ошибки, радиолокационные измерения, короткие волны.
Основными особенностями условий работы загоризонтных радиолокационных станций коротковолнового диапазона (РЛС ЗГО КВ) является большое разнообразие помеховых условий [1]. Это связано с изменчивостью условий распространения радиоволн [1,2] и чрезвычайной загруженностью диапазона работой различных радиотехнических средств.
В загоризонтной (ЗГ) радиолокации активные неорганизованные помехи на входе приемного устройства обусловлены, как правило, большим количеством сигналов от посторонних радиостанций, промышленными и атмосферными помехами, а также галактическими шумами (собственные шумы приемника при этом не имеют существенного значения). Отсюда возникает актуальная задача борьбы с помехами различными методами. Рассмотрим несколько вариантов противоречий, возникающих при решении данной задачи.
1. Для успешного обнаружения объектов в загоризонтной радиолокации необходимо, чтобы уровень отраженного сигнала от цели превышал уровень широкополосных помех [2].
1.1 необходимо увеличить уровень отраженного сигнала от цели, увеличив излучаемую мощность (Рисунок 1).
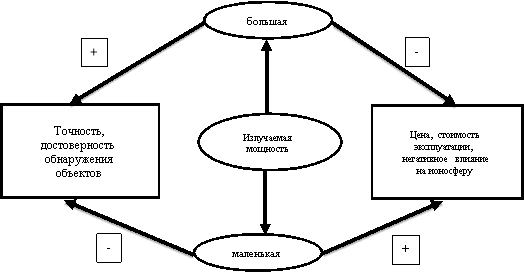
Рис. 1. Противоречие, связанное с излучаемой мощностью
Недостатком такого метода является огромная излучаемая мощность, увеличение цены производства и эксплуатации, негативное влияние на ионосферу.
1.2 использование метода резонансного лоцирования не применимо из-за специфики КВ радиолокации (отражение от ионосферы).
1.3 Применение метода когерентного накопления сигнала (сигнал складывается когерентно, шумы нет) Рисунок 2.
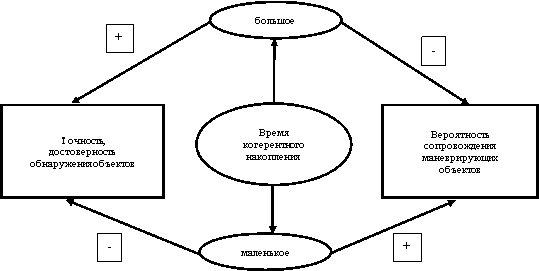
Рис. 2. Противоречие, связанное с когерентным накоплением сигнала
Таким образом, находится компромисс между временем когерентного накопления и расстоянием, пройденным объектом за время накопления.
Решение 1. Время когерентного накопления выбирается равным 5 сек. За это время, обнаруживаемый объект не успевает выйти из элемента разрешения, при скоростях до 900 км/ч.
Решение 2. Применение нескольких когерентных обработок, с различным временем когерентного накопления и параллельная обработка с последующим объединением информации.
2. В перспективе должны быть сняты противоречия, связанные с многомодовым распространением сигнала (особенности распространения КВ радиоволн в ионосфере).
2.1 При многомодовом распространении происходит снижение точности и достоверности обнаружения объектов, но при этом максимизируется уровень принятого сигнала. В другом случае уровень сигнала не максимально возможный, но распространение одномодовое.
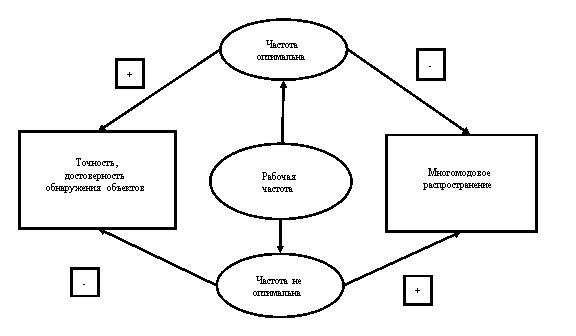
Рис. 3. Противоречие, связанное с выбором рабочей частоты
2.2 Противоречия, связанные с дальнейшим увеличением точности посредствам применения более точной модели ионосферы путем ее коррекции данными от внешних источников (вертикальные ионозонды, трансионосферное зондирование, наклонное зондирование ионосферы) (Рисунок 4). Требует организацию каналов связи для поставки информации, получается разнесённая схема РЛС на огромной территории.
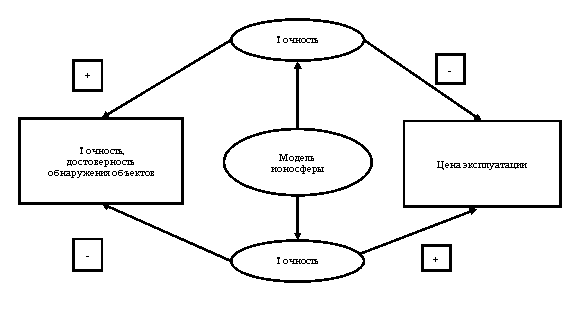
Рис. 4 Противоречие, связанное с более точной модели ионосферы
3 Возможные варианты решения противоречий.
3.1 Для решения противоречия, приведенного в п. п. 2.1, возможно разработка программного комплекса третичной обработки, в котором будут сопоставляться все обнаруженные объекты друг с другом и по некоторым признакам будут вычисляться ложные объекты, которые появились из-за многомодового распространения [3,4].
3.2 Для противоречия из п. п. 2.1 так же возможно идентификация обнаруженных объектов с эталонными, при их наличии, с последующим вычислением ошибки (дельты) и распространением ее на другие объекты, тем самым уменьшая среднюю ошибку. А также это должно позволить решить проблему многомодовости.
3.3 Для решения противоречия из п. п. 2.2 возможно путем коррекции модели ионосферы коэффициентами (дельтами), полученными при решении противоречия 2.1 методом 3.2.
Таким образом, на рисунке 5 показан результирующий вариант схемы развития средств РЛС КВ. Как видно из рисунка, для дальнейшего развития средств загоризонтного обнаружения возможно применение сложных сигналов, вспомогательных источников информации и третичная обработка информации.
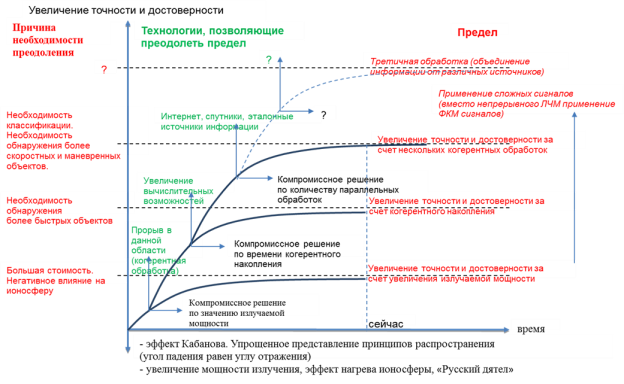
Рис. 5. Результирующая схема развития средств загоризонтного обнаружения
Литература:
- Альперт Я. Л. «Распространение электромагнитных волн и ионосфера». — М., Наука, 1972.
- Фабрицио Джузеппе А., изд. Техносфера 2018 г., 936 л., «Высокочастотный загоризонтный радар. Основополагающие принципы, обработка сигналов и практическое применение».
- Радиоинфоком 2015 г. МГТУ МИРЭА, «Отождествление трасс воздушных объектов по информации, получаемой от различных источников», Крауз П. В.
- Военно-научная конференция «Проблемные вопросы создания, развития и применения систем разведки и контроля воздушного пространства и организации его использования авиацией ВС РФ и пути их решения» 2017 г., «Объединение траекторных данных от различных источников», Крауз П. В.

