Одной из важнейших проблем в области повышения экономической эффективности водного транспорта является сокращение стояночного времени судов в портах. Сокращение стоянки судов может быть достигнуто за счет проведения целого комплекса организационно-технических мероприятий, направленных как на улучшение обслуживания судов в портах, так и на интенсификацию погрузо-разгрузочных работ.
Рассматривается задача составления расписания в следующей постановке. Прибывшее в порт грузовое судно, с порожними трюмами необходимо загрузить двумя видами грузов: листовой сталью и круглым лесом. Обработку необходимо произвести в такой последовательности, при которой суммарное время нахождения судна у причальной стенки под обработкой было бы минимальным. Погрузка осуществляется портальным краном и колёсным экскаватором с грейфером. Портальный кран выполняет операцию по погрузке листов в трюмы, а экскаватор укладывает лес на палубу над трюмами.
Предположим, что для погрузки листов в i-й трюм необходимо время ti, а для укладки леса над i-ым трюмом время ti(i= 1, 2 …, N, где N — число трюмов). Операция по укладке леса на палубу над i-ым трюмом может выполняться только после завершения загрузки i-го трюма. Поэтому в начальный момент (до окончания работы портального крана) экскаватор простаивает. Простои экскаватора будут зависеть от выбранной очередности обработки трюмов, осуществляемой портальным краном.
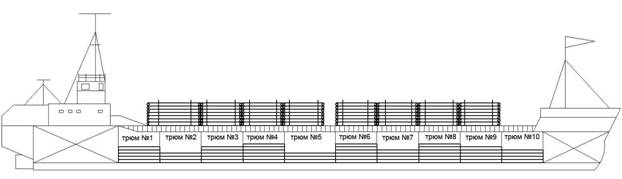
Рис.1. Схема размещения грузов в трюмах и на палубе судна
Предположим, что портальный кран приступает к погрузке очередного трюма непосредственно после завершения работы на предшествующем, т. е. работает без перерывов. Очевидно, условия работы экскаватора не оказывают влияния на портальный кран. В общем случае время грузовых операций может быть представлено в виде множества, состоящего из пар чисел:
t1, t1
t2, t2
……
tN, tN.
Время обработки судна изменяется в зависимости от выбранной перестановки. Если, например, N=3 и пары чисел имеют значения
t1=5, t1=3,
t2=4, t2=6,
t3=7, t3=4,
то время обработки судна åi для различных перестановок будет равно:
å1=f(t1, t2, t3)=20
å2=f(t1, t3, t2)=22
å3=f(t2, t1, t3)=20
å4=f(t2, t3, t1)=19
å5=f(t3, t1, t2)=22
å6=f(t3, t2, t1)=20.
Оптимальным решением является перестановка, соответствующая å4=19.
Если хi — время простоя экскаватора перед тем, как будет завершена работа портального крана по погрузке i-го трюма, то для минимизации простоев экскаватора следует найти минимум из всех максимальных значений, определенных рекуррентными соотношениями:
 ,
,
 ,
,
где
 .
.
С этой целью может быть использован следующий алгоритм перестановки.
1. Записать исходные данные ti, ti, i=1 …, N в виде двух столбцов с соответствующей начальной нумерацией.
2. Определить среди чисел ti, ti наименьшее. Если таковым окажется ti — выполнять эту операцию первой. Если таким числом является ti — обрабатывать i-ый трюм необходимо последним.
3. Исключить из дальнейшего рассмотрения i-ую группу чисел и продолжить работу с оставшимися числами, согласно п. п. 1 и 2 алгоритма.
4. При наличии нескольких минимальных чисел — выбрать группу с меньшим номером. Если ti = ti, упорядочивать последовательность обработки трюмов по значению ti.
Ниже приведена программа для реализации алгоритма в среде MatLAB.
% sah2a.m
% Составление оптимального расписания выполнения погрузочных работ.
% Исходные данные представлены матрицей АА (время выполнения грузовых операций
% в относительных единицах). Первый столбец АА — время погрузки в %трюмы листовой стали, второй столбец -время погрузки лесоматериалов). Номер
% строки соответствует номеру трюма (см. рис.1)
AA=[ 0.0153 0.5028;
0.4451 0.4289;
0.9318 0.3046;
0.4660 0.1897;
0.4186 0.1934;
0.8462 0.6822;
0.5252 0.3028;
0.2026 0.5417;
0.6721 0.1509;
0.8381 0.6979];
A=AA
L=size(A); N=L(1)
Za=[]; Zb=[];
for I=1 : L(1)-1;
[z1,I1]=min(A(:,1)); [z2,I2]=min(A(:,2));
S=[ ];
if z2<z1
ab1=A(I2, :);
Zb=[Zb;ab1];
s=I2;
elseif z1<=z2
ab2=A(I1,:);
Za=[Za;ab2];
s=I1;
end
S=[S s]; k=S;
A1=[A(1:k-1,:); A(k+1:N-I+1,:)];
A=A1;
Za;
Zb;
S=[ ];
end
A1;
Zb1=flipud (Zb);
Aopt = [Za;A1;Zb1]
v = 1:N;
plot (v,Aopt(:,1),'*',v,Aopt(:,2),'o'),grid
Решение
A =[ 0.0153 0.5028
0.4451 0.4289
0.9318 0.3046
0.4660 0.1897
0.4186 0.1934
0.8462 0.6822
0.5252 0.3028
0.2026 0.5417
0.6721 0.1509
0.8381 0.6979]
N = 10.Работа программы завершается графическими построениями. Для оптимальной перестановки ti на графике представляются знаком “ * ”, а время ti — знаком “o”.
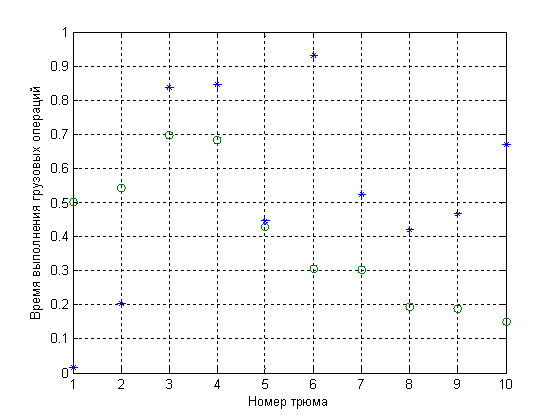
Рис.2 Оптимальное расписание обработки судна
В заключение приведена оптимальная перестановка, выполненная с помощью описанной выше программы и являющаяся, по существу, расписанием, соответствующим минимуму времени обработки судна.
С помощью алгоритма обеспечивается расчет минимума стояночного времени судов под обработкой, что способствует повышению экономической эффективности их использования и улучшению технологии работы перегрузочных средств порта.

